










自动驾驶系列
文章目录
前言
自动驾驶规划控制方向离不开坐标和坐标变换。一般涉及全局坐标系和车身坐标系相互转换,还有笛卡尔坐标系和自然坐标系之间的转换。坐标转换一般会涉及到三角函数、向量、复数、矩阵等知识。本篇先介绍全局坐标系与车身坐标系之间的转换,为后续的内容热一下身。
一、全局坐标系和车身坐标系
1. 全局坐标系
一般全局坐标系是将地球作为参考系进行定义的,也就是大地坐标系。
对于行车来说,车辆在大地上的位置信息通常来自于卫星导航系统,位置坐标在WGS-84坐标系(地理坐标系,使用经纬度表示任意位置)中表示。为了方便计算距离和面积,还需要通过通用横轴墨卡托(Universal Transverse Mercator, UTM)网络系统将其转换至笛卡尔坐标系。
但对于局部泊车系统来说,不需要全局定位,也就无需考虑地理坐标系因素,只需要在地图上选取一点作为原点构建全局坐标系即可。
2. 车身坐标系
车身坐标系是将车辆自身作为参考系建立的坐标系。原点一般选取车辆后轴中心点或者车辆的质心。
车辆上安装的各种传感器(比如摄像头、雷达)的位置,以及车辆的轮廓(如果是用矩形逼近车辆轮廓,则通常使用四个角点表示车辆轮廓)都需要使用车身坐标系下的坐标。
二、坐标系转换
2.1.旋转矩阵推导
坐标变换和向量旋转的关系
2.1.1 坐标变换和向量旋转的关系
一个向量OP旋转θ角度,相当于先把坐标系A旋转θ角度得到坐标系B,然后在坐标系B中取与OP
相同坐标值的向量OQ,最后再把 OQ 的坐标映射回坐标系A。
相应地,将坐标系B(相对于坐标系A的夹角为θ)中的一个坐标值映射到坐标系A的操作就等同于——在坐标系A中先取和坐标系B中相同坐标值的向量,然后将其旋转θ角度。
为什么会有这种等价关系呢?
因为坐标和向量是等价的,坐标只是向量的一种表示方法。坐标系和向量空间也是等价的,坐标轴就是相互正交的单位向量,对坐标轴的操作等价于/可以代替对整个向量空间中向量的操作。
Tips:对概念的深入理解很重要,尤其是等价变换。因为这往往是公式推导和证明的思路。
2.1.2 基于复数和欧拉公式推导
在复平面上使用复数乘法等价向量旋转运算。
 易得:
易得:
 其中,R即为旋转矩阵。
其中,R即为旋转矩阵。
2.1.3 基于纯向量运算推导
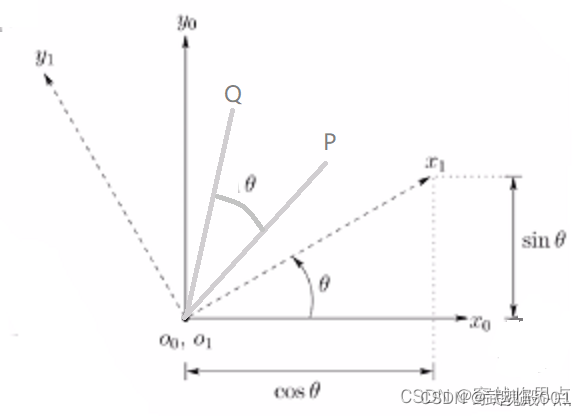
如图所示,坐标系B( x1,o1,y1) 相对于坐标系A(x0,o0,y0) 旋转了 θ 角度。两个坐标系内的任意两个坐标值相同(指在各自坐标系中的坐标值)的两个向量均相差 θ 角度。
所以,求坐标系B中的某一坐标值(向量)在坐标系A中的坐标值(向量投影),就等价于求坐标系B的坐标轴(基底)在坐标系A上的坐标值(投影)。
则有

2.2 车身坐标系转全局坐标系

三、总结
掌握和深入理解基础概念才有来自不同角度的推导的思路。
掌握推导流程后,最好记住旋转矩阵。















 2749
2749











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









