






目录
复原级数面向退化模型,采用相反的过程进行处理。
1图像退化/复原
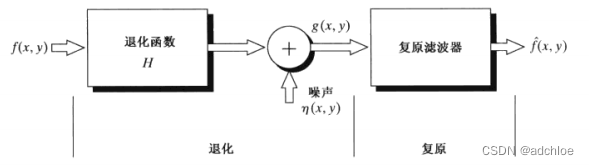
退化过程被建模为一个退化函数和一个加性噪声项。
如果H是一个线性,位置不变的过程,空间域的退化图像可以由式子给出:
g
(
x
,
y
)
=
h
(
x
,
y
)
⋆
f
(
x
,
y
)
+
η
(
x
,
y
)
g(x,y)=h(x,y)\star f(x,y)+\eta(x,y)
g(x,y)=h(x,y)⋆f(x,y)+η(x,y)
其中
h
(
x
,
y
)
h(x,y)
h(x,y)是退化函数的空间表示,
⋆
\star
⋆表示空间卷积。
上面式子可以写成等价的频率域表示:
G
(
u
,
v
)
=
H
(
u
,
v
)
F
(
u
,
v
)
+
N
(
u
,
v
)
G(u,v)=H(u,v)F(u,v)+N(u,v)
G(u,v)=H(u,v)F(u,v)+N(u,v)
2噪声模型
噪声主要来源于图像的获取和传输过程。
2.1 一些重要的噪声概率密度函数
-
高斯噪声
其概率密度函数服从高斯分布的一类噪声。
p ( z ) = 1 2 π σ e − ( z − z ~ ) 2 / 2 σ 2 p(z)=\frac{1}{\sqrt{2\pi}\sigma } e^{-(z-\tilde{z})^2/2\sigma ^2} p(z)=2πσ1e−(z−z~)2/2σ2
其中 z z z是灰度值, z ~ \tilde{z} z~表示 z z z的平均值, σ \sigma σ表示 z z z的标准差。 -
瑞利噪声
p ( z ) = { 2 b ( z − a ) e − ( z − a ) 2 / b , z ≥ a 0 , z < a p(z)=\begin{cases}\frac{2}{b} (z-a)e^{-(z-a)^2/b},z\ge a\\0,z<a\end{cases} p(z)={b2(z−a)e−(z−a)2/b,z≥a0,z<a
概率密度的均值和方差由
z ~ = a + ( π b / 4 ) 1 / 2 \tilde{z}=a+(\pi b/4)^{1/2} z~=a+(πb/4)1/2
σ 2 = b ( 4 − π ) 4 \sigma^2=\frac{b(4-\pi)}{4} σ2=4b(4−π)
-伽马噪声
p
(
z
)
=
{
a
b
z
b
−
1
(
b
−
1
)
!
e
−
a
z
,
z
≥
a
0
,
z
<
a
p(z)=\begin{cases}\frac{a^bz^{b-1}}{(b-1)!}e^{-az},z\ge a \\0,z<a\end{cases}
p(z)={(b−1)!abzb−1e−az,z≥a0,z<a
均值和方差由
z
~
=
b
/
a
\tilde{z}=b/a
z~=b/a
σ
2
=
b
/
a
2
\sigma^2=b/a^2
σ2=b/a2
-
指数噪声
p ( z ) = { a e − a z , z ≥ 0 0 , z < 0 p(z)=\begin{cases}ae^{-az},z\ge0\\0,z<0\end{cases} p(z)={ae−az,z≥00,z<0
均值和方差由
z ~ = 1 / a \tilde{z}=1/a z~=1/a
σ 2 = 1 / a 2 \sigma^2=1/a^2 σ2=1/a2 -
均匀噪声
p ( z ) = { 1 b − a , a ≤ z ≤ b 0 , 其他 p(z)=\begin{cases}\frac{1}{b-a},a\le z\le b\\0 ,其他 \end{cases} p(z)={b−a1,a≤z≤b0,其他
均值和方差由
z ~ = a + b / 2 \tilde{z}=a+b/2 z~=a+b/2
σ 2 = ( b − a ) 2 / 12 \sigma^2=(b-a)^2/12 σ2=(b−a)2/12 -
脉冲噪声
p ( z ) = { p a , z = a p b , z = b 1 − p a − p b , 其他 p(z)=\begin{cases}p_a,z=a\\p_b,z=b\\1-p_a-p_b,其他\end{cases} p(z)=⎩ ⎨ ⎧pa,z=apb,z=b1−pa−pb,其他
如果b>a,灰度级b在图像中为一个亮点,反之,灰度级a在图像中显示为一个暗点。若Pa或Pb为零,则脉冲噪声为单极脉冲。如果两者都不为零,尤其在它们近似相等时,脉冲噪声将类似于随机分布在图像上的胡椒和盐粉微粒,因此双极脉冲噪声也称为椒盐噪声。
2.2 周期噪声
一幅图像中的周期噪声是在图像获取期间由电力或机电干扰产生的。周期噪声可以通过频率域滤波来显著的减少。
2.3 噪声参数的估计
典型地,周期噪声的参数是通过检测图像的傅里叶谱来估计的。
有时可以使用直方图的形状来确定最接近的PDF匹配。
3空间滤波(只存在噪声的复原)
3.1 均值滤波器
-
算术均值滤波器
f ~ ( x , y ) = 1 m n ∑ g ( s , t ) \tilde{f}(x,y)=\frac{1}{mn}\sum g(s,t) f~(x,y)=mn1∑g(s,t)
使用大小为 m ∗ n m*n m∗n的一个空间滤波器来实现,该滤波器模糊了结果,降低了噪声。 -
几何均值滤波器
f ~ ( x , y ) = [ ∏ g ( s , t ) ] 1 / ( m n ) \tilde{f}(x,y)=[\prod g(s,t)]^{1/(mn)} f~(x,y)=[∏g(s,t)]1/(mn)
该滤波器相比于算术均值滤波器处理中丢失的图像细节更少。 -
逆谐波均值滤波器
f ~ ( x , y ) = ∑ g ( s , t ) Q + 1 ∑ g ( s , t ) Q \tilde{f}(x,y)=\frac{\sum g(s,t)^{Q+1}}{\sum g(s,t)^{Q}} f~(x,y)=∑g(s,t)Q∑g(s,t)Q+1
Q被称为滤波器的阶数,适合减少或消除椒盐噪声的影响,当 Q值为正时,该滤波器消除胡椒噪声;当 Q值为负时,该滤波器消除盐粒噪声。但它不能同时消除这两种噪声。
3.2 统计排序滤波器
-
中值滤波器
f ~ ( x , y ) = m e d i a n [ g ( s , t ) ] \tilde{f}(x,y)=median[g(s,t)] f~(x,y)=median[g(s,t)]
对于某些类型的随机噪声,可以提供良好的去噪能力。 -
最值滤波器
最大值滤波器 f ~ ( x , y ) = m a x [ g ( s , t ) ] \tilde{f}(x,y)=max[g(s,t)] f~(x,y)=max[g(s,t)]
最小值滤波器 f ~ ( x , y ) = m i n [ g ( s , t ) ] \tilde{f}(x,y)=min[g(s,t)] f~(x,y)=min[g(s,t)]
对于发现图像中的最亮点和最暗点非常有用。 -
中点滤波器
f ~ ( x , y ) = 1 2 [ m a x [ g ( s , t ) + m i n [ g ( s , t ) ] ] \tilde{f}(x,y)=\frac{1}{2}[max[g(s,t)+min[g(s,t)]] f~(x,y)=21[max[g(s,t)+min[g(s,t)]]
对于随机分布噪声工作得最好,如高斯噪声或均匀噪声。
4频率域滤波消除周期噪声
在傅里叶变换中,周期噪声在对应于周期干扰的频率处,以集中的能量脉冲形式出现,使用选择性滤波器可以分离出噪声。
5逆滤波
使用退化函数除退化图像的傅里叶变换
G
(
u
,
v
)
G(u,v)
G(u,v)来计算原始图像傅里叶变换的估计
F
~
(
x
,
y
)
\tilde{F}(x,y)
F~(x,y)。
F
~
(
x
,
y
)
=
G
(
u
,
v
)
H
(
u
,
v
)
=
F
(
u
,
v
)
+
N
(
u
,
v
)
H
(
u
,
v
)
\tilde{F}(x,y)=\frac{G(u,v)}{H(u,v)} =F(u,v)+\frac{N(u,v)}{H(u,v)}
F~(x,y)=H(u,v)G(u,v)=F(u,v)+H(u,v)N(u,v)
- 最小均方误差滤波
最小均方差(维纳)滤波用来去除含有噪声的模糊图像,其目标是找到未污染图像的一个估计,使它们之间的均方差最小,可以去除噪声,同时清晰化模糊图像。
目标是找出一个未污染的图像f的一个估计 f ^ \hat{f} f^,使得它们之间的均方误差最小。
误差度量由式子给出:
e 2 = E [ ( f − f ^ ) 2 ] e^2=E[(f-\hat {f})^2] e2=E[(f−f^)2]















 585
585

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









