







1、
2、

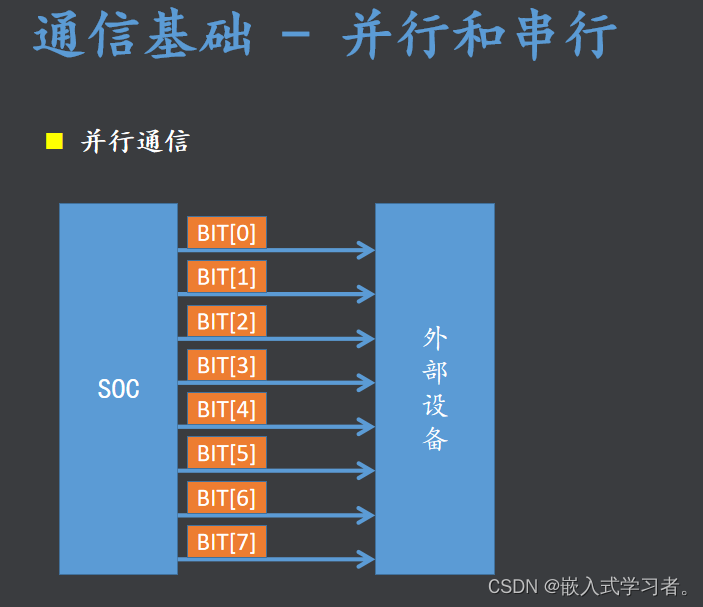
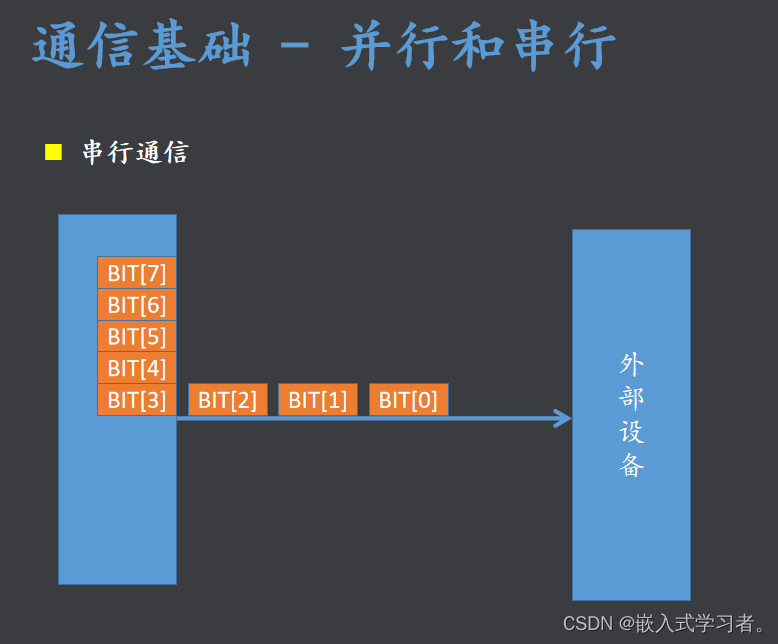
传送的是位不是字节
3、
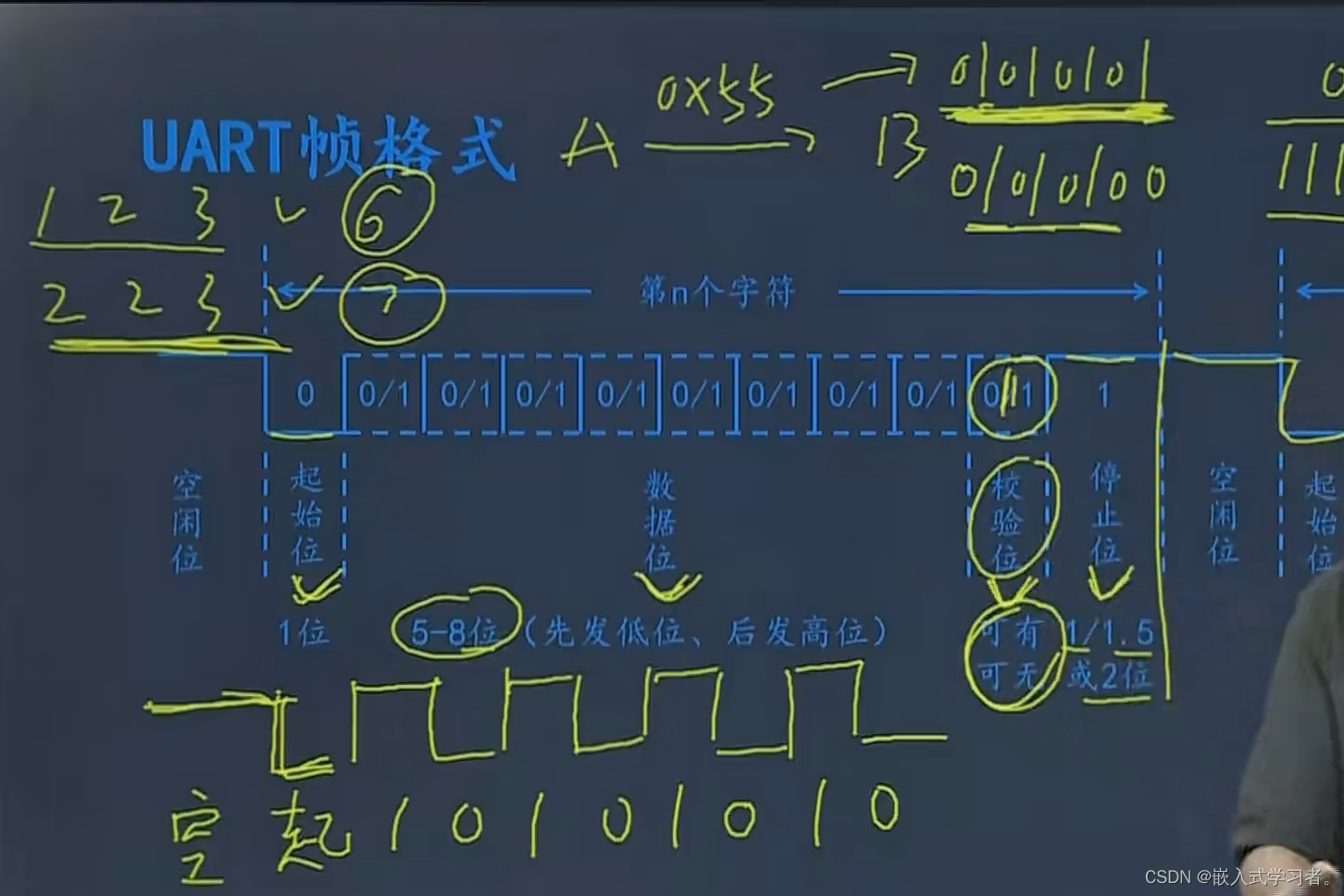
串口一次发送一个字节的原因:避免累计误差,因为两台计算机通信计时方式会有差别,比如计算机一发送一个1s的高电平(波特率是1bps),到计算机二这儿他可能回读到0.9s的高电平,长期积累后面数据就会错位。
异步通讯:收发双方时钟不同。
#include "exynos_4412.h"
void UART_Init(void)
{
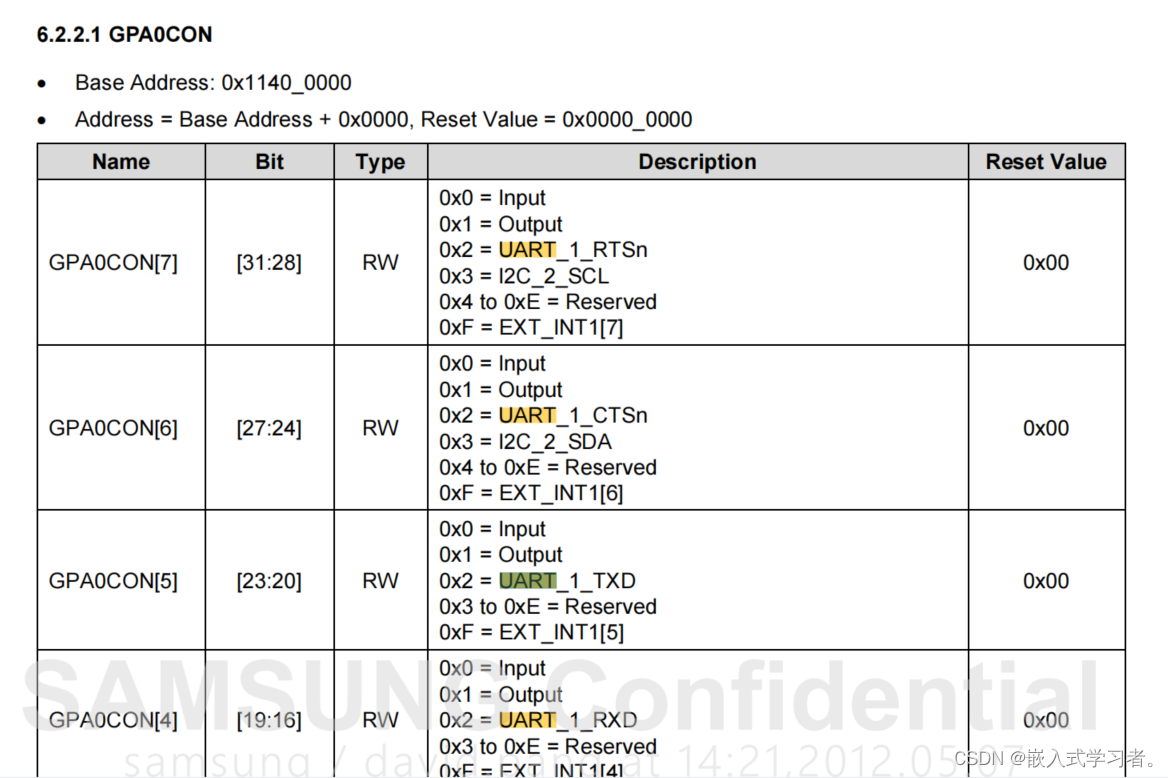
/*1.将GPA1_0和GPA1_1设置成UART2的接收和发送引脚 GPA1CON[7:0]*/
GPA1.CON = GPA1.CON & (~(0xFF << 0)) | (0x22 << 0);
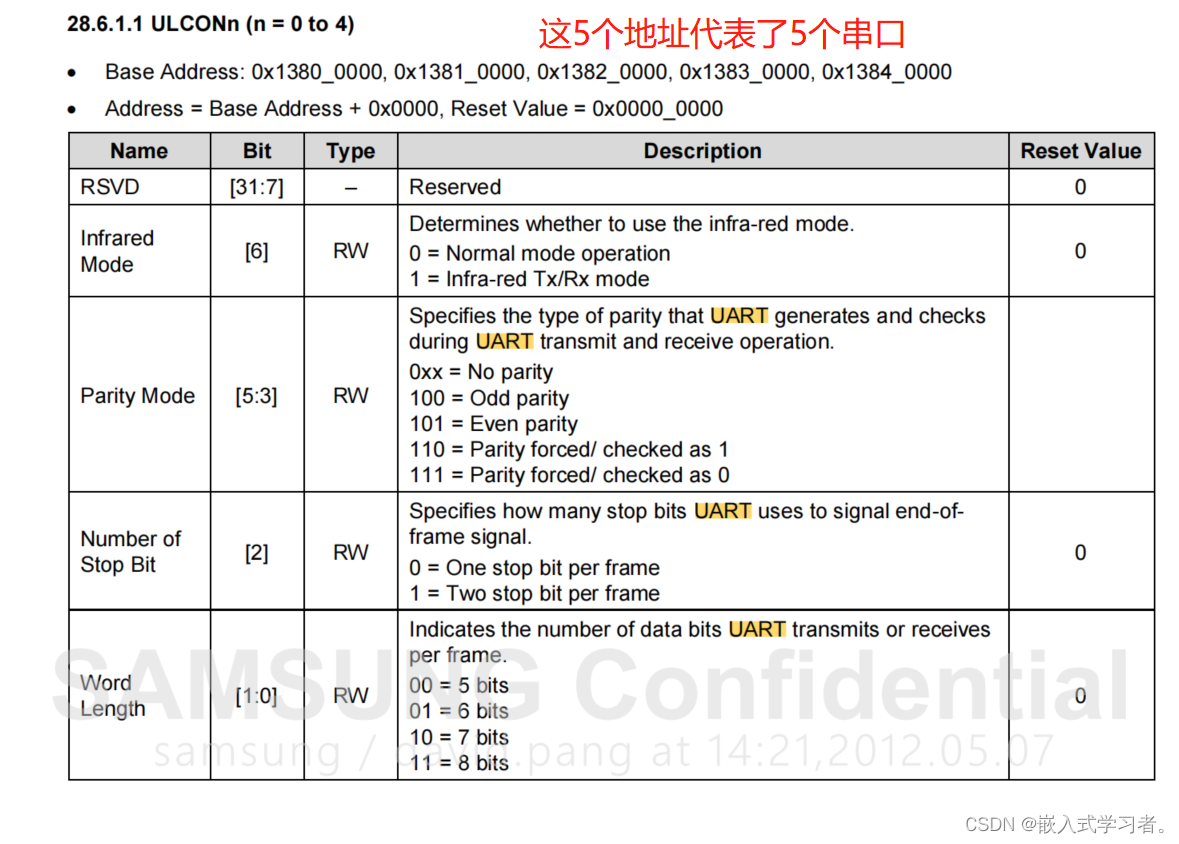
/*2.设置UART2的帧格式 8位数据位 1位停止位 无校验 正常模式 ULCON2[6:0]*/
UART2.ULCON2 = UART2.ULCON2 & (~(0x7F << 0)) | (0x3 << 0);
/*3.设置UART2的接收和发送模式为轮询模式 UCON2[3:0]*/
UART2.UCON2 = UART2.UCON2 & (~(0xF << 0)) | (0x5 << 0);
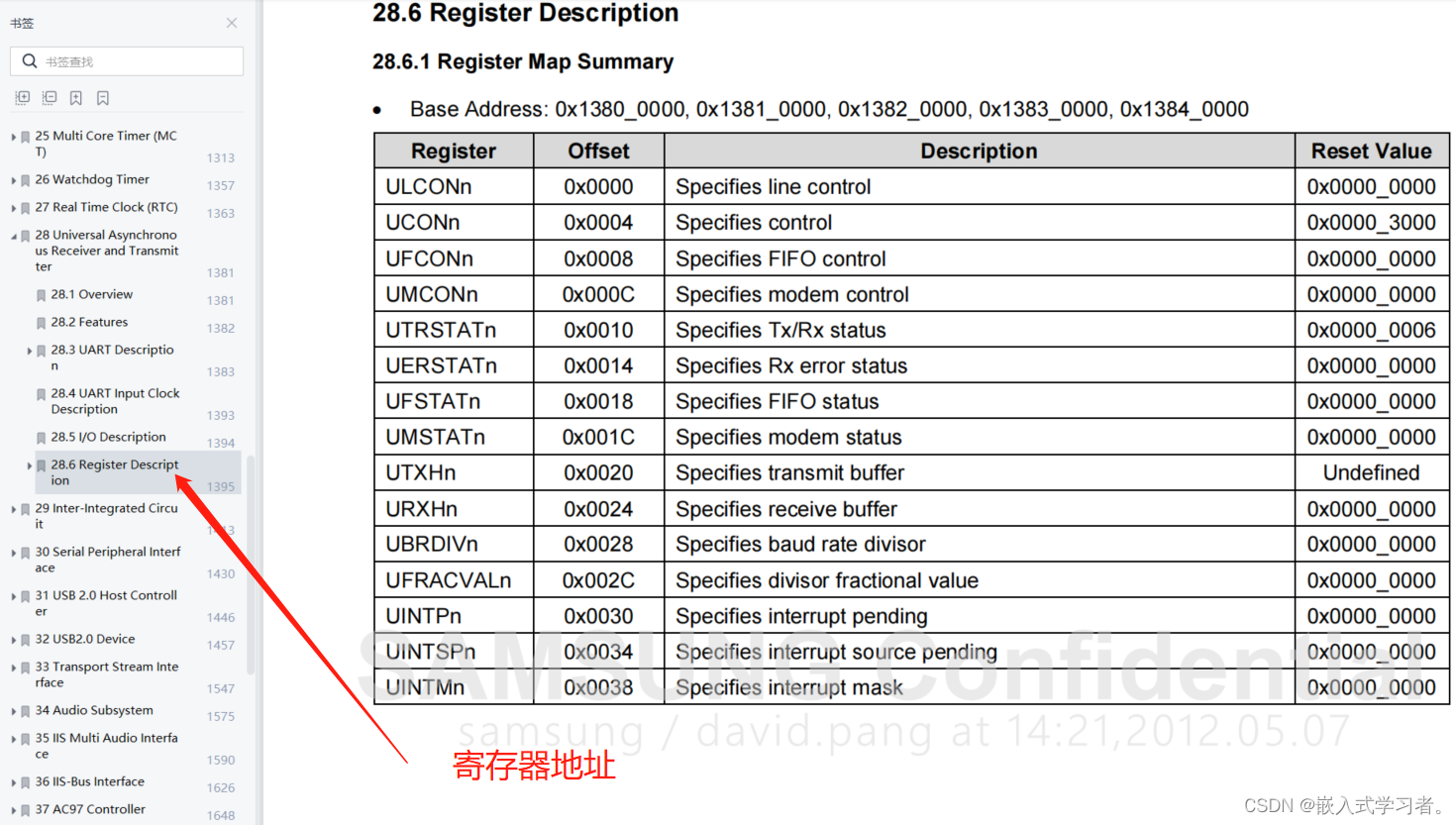
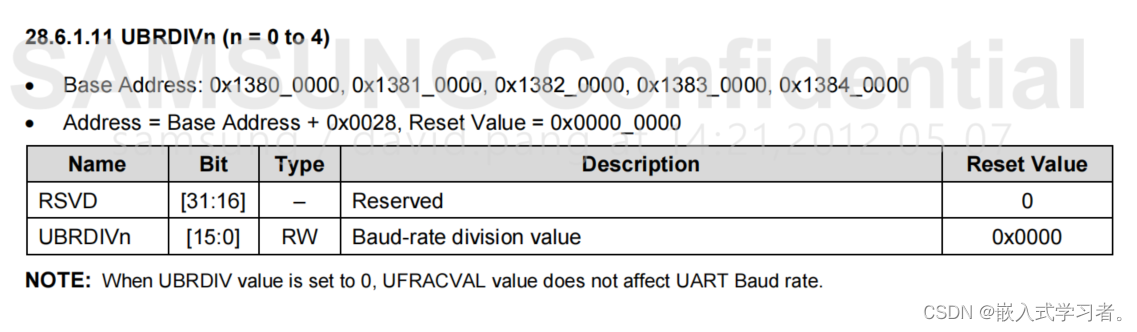
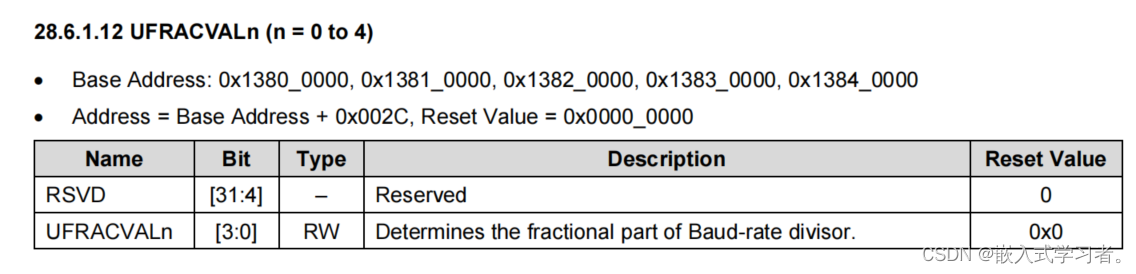
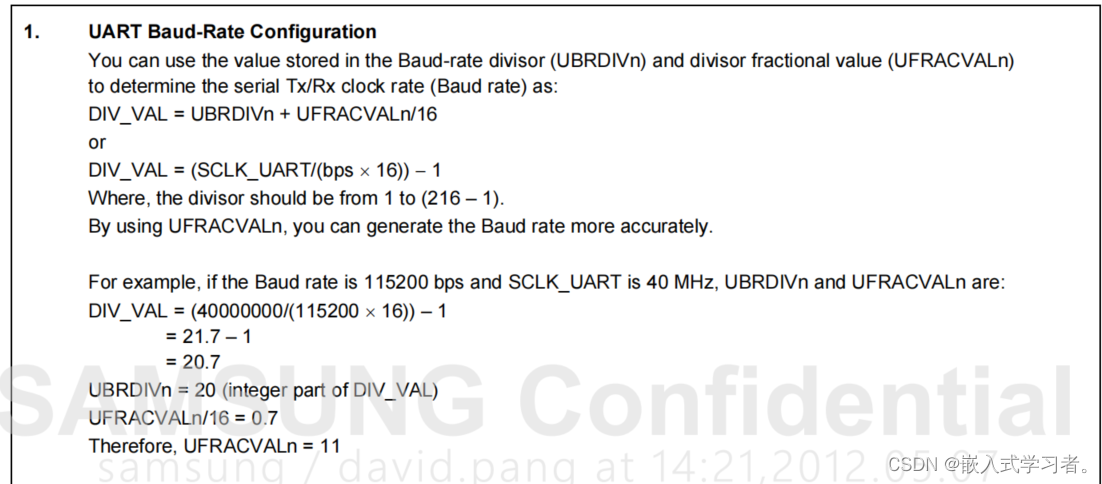
/*4.设置UART2的波特率为115200 UBRDIV2/UFRACVAL2*/
UART2.UBRDIV2 = 53;
UART2.UFRACVAL2 = 4;
}
void UART_Send_Byte(char Dat)
{
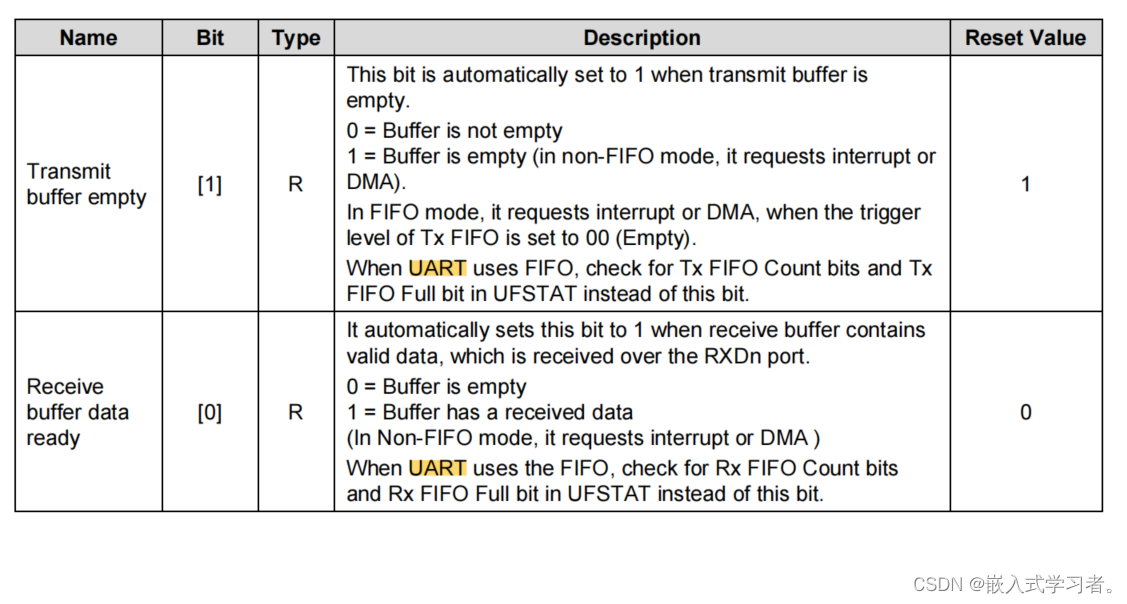
/*等待发送寄存器为空,即上一个数据已经发送完成 UTRSTAT2[1]*/
while(!(UART2.UTRSTAT2 & (1 << 1)));
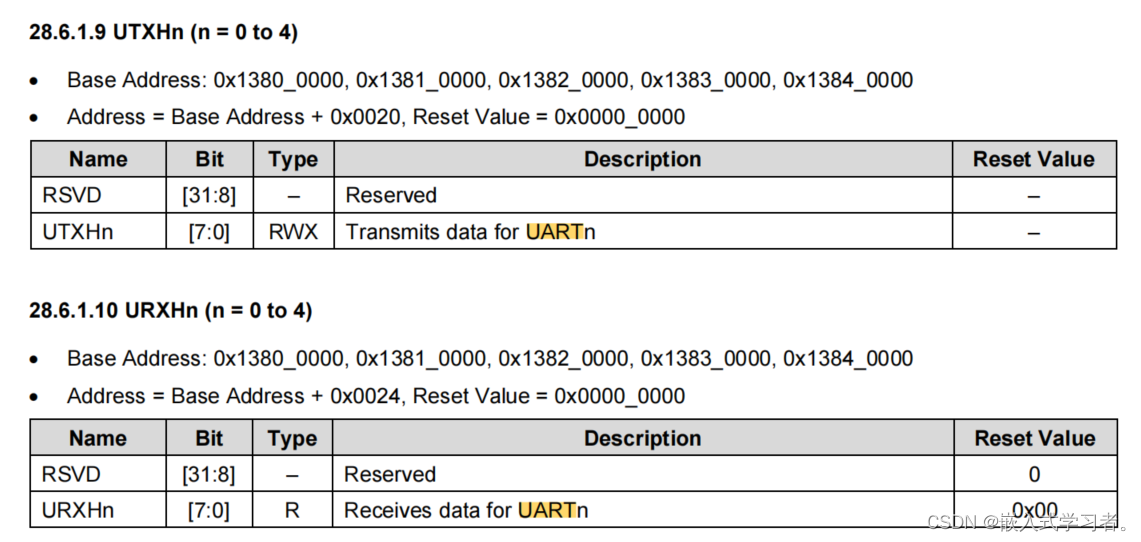
/*将要发送的数据写入发送寄存器 UTXH2*/
UART2.UTXH2 = Dat;
}
char UART_Rec_Byte(void)
{
char Dat = 0;
/*判断接收寄存器是否接收到了数据 UTRSTAT2[0]*/
if(UART2.UTRSTAT2 & 1)
{
/*从接收寄存器中读取接收到的数据 URXH2*/
Dat = UART2.URXH2;
return Dat;
}
else
{
return 0;
}
}
void UART_Send_Str(char * pstr)
{
while(*pstr != '\0')
UART_Send_Byte(*pstr++);
}
int main()
{
char RecDat = 0;
UART_Init();
while(1)
{
/*
RecDat = UART_Rec_Byte();
if(RecDat == 0)
{
}
else
{
RecDat = RecDat + 1;
UART_Send_Byte(RecDat);
}
*/
/*
UART_Send_Str("Hello World\n");
*/
printf("Hello World\n"); //这个与Linux的printf不同,这个是通过串口打印,而Linux上是从c库来
}
return 0;
}
















 465
465











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











