









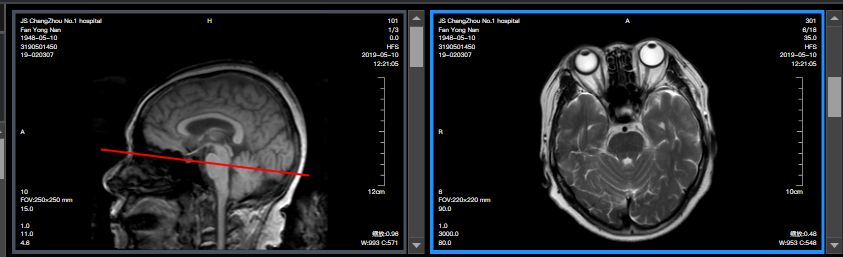
1.定位线概念:某个方位的影像在另一个方向的影像上的投影相交线,例如横断面(从头到脚的方向)在矢状面(从左手到右手)上的影像投影面交线。
举个例子:右边的是MR(核磁共振)的某一帧切片,这是从头开始扫描,扫描到眼睛这个位置,
而左边图像是从左手到右手的扫描切片,那么右边图像的位置就恰好在左边图像的眼睛的位置,用红线标出的位置则为定位线,一般用于医生参考病灶在矢状面、冠状面和横断面的具体方位。
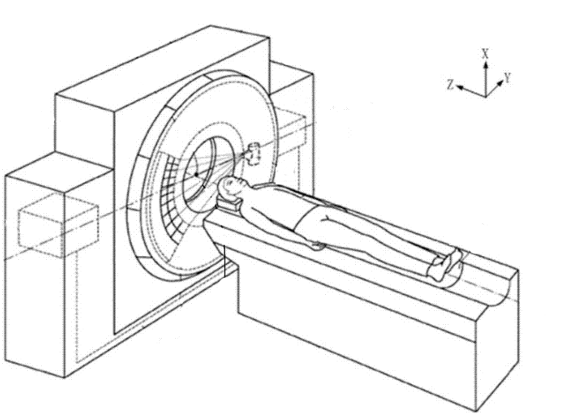
2.检查设备示意图
在笛卡尔空间直角坐标系中,Y 右肩膀到左肩膀,X 后背到前胸,Z 足到头
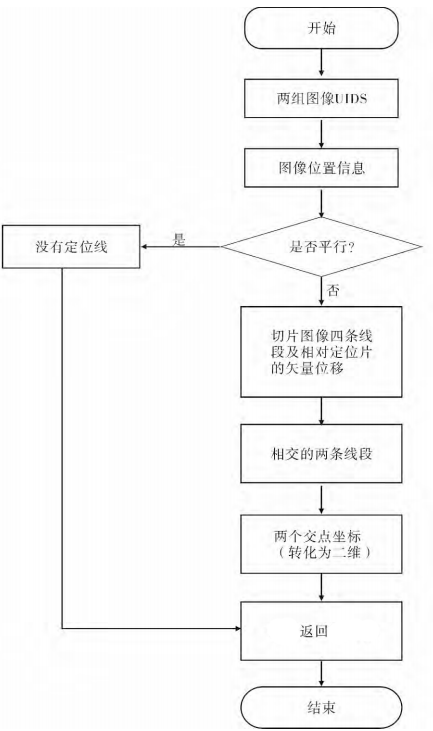
3.算法流程
4.代码实现:
创建图像结构
public FrameGeometry(DicomDataset image)
: this(image.GetString(DicomTag.FrameOfReferenceUID),
image.GetValues<double>(DicomTag.ImagePositionPatient),
image.GetValues<double>(DicomTag.ImageOrientationPatient),
image.GetValues<double>(DicomTag.PixelSpacing),
image.GetSingleValue<int>(DicomTag.Columns),
image.GetSingleValue<int>(DicomTag.Rows))
{
// TODO:
FrameOfReferenceUID:图片UID
ImagePositionPatient:病人方向
ImageOrientationPatient:图片方向
PixelSpacing:像素间距
Columns:宽度
Rows:高度
}判断是否符合定位条件:
/// <summary>/// 判断是否可以画定位线
/// </summary>
/// <param name="sourceFrame">源图像结构</param>
/// <param name="destinationFrame">目标图像结构</param>
/// <returns></returns>
public static bool CanDrawLocalizer(FrameGeometry sourceFrame, FrameGeometry destinationFrame)
{
// 检查图像结构
if (sourceFrame == null) return false;
if (destinationFrame == null) return false;
// 如果两个帧中的任何一个不是空间坐标系,则无法定位
if (sourceFrame.Orientation == FrameOrientation.None || destinationFrame.Orientation == FrameOrientation.None) return false;
// 只有正交图像才能绘制,方向相同则退出
if (sourceFrame.Orientation == destinationFrame.Orientation) return false;
// 检查FrameOfReferenceUid
if (string.IsNullOrEmpty(sourceFrame.FrameOfReferenceUid) || string.IsNullOrEmpty(destinationFrame.FrameOfReferenceUid)) return false;
if (sourceFrame.FrameOfReferenceUid != destinationFrame.FrameOfReferenceUid) return false;
return true;
}计算交线点:
/// <summary>
///回两个图像相交处公共像素线
/// </summary>
/// <param name="sourceFrame">源图像结构</param>
/// <param name="destinationFrame">目标图像结构</param>
/// <param name="startPoint">起点输出</param>
/// <param name="endPoint">重点输出</param>
/// <returns></returns>
public static bool CalcualteIntersectionLocalizer(FrameGeometry sourceFrame, FrameGeometry destinationFrame, out Point2 startPoint, out Point2 endPoint)
{
double t; // 平面方程系数
double nA, nB, nC, nD, nP;
var lstProj = new List<Point3D>();
// 初始化
startPoint = Point2.Origin;
endPoint = Point2.Origin;
// 验证
if (destinationFrame.DirectionNormal.IsZero)
return false;
nP = destinationFrame.DirectionNormal * destinationFrame.PointTopLeft;
nA = destinationFrame.DirectionNormal * sourceFrame.PointTopLeft;
nB = destinationFrame.DirectionNormal * sourceFrame.PointTopRight;
nC = destinationFrame.DirectionNormal * sourceFrame.PointBottomRight;
nD = destinationFrame.DirectionNormal * sourceFrame.PointBottomLeft;
// AB
if (Math.Abs(nB - nA) > Constants.Epsilon)
{
t = (nP - nA) / (nB - nA);
if (t > 0 && t <= 1)
lstProj.Add(sourceFrame.PointTopLeft + t * (sourceFrame.PointTopRight - sourceFrame.PointTopLeft));
}
// BC
if (Math.Abs(nC - nB) > Constants.Epsilon)
{
t = (nP - nB) / (nC - nB);
if (t > 0 && t <= 1)
lstProj.Add(sourceFrame.PointTopRight + t * (sourceFrame.PointBottomRight - sourceFrame.PointTopRight));
}
// CD
if (Math.Abs(nD - nC) > Constants.Epsilon)
{
t = (nP - nC) / (nD - nC);
if (t > 0 && t <= 1)
lstProj.Add(sourceFrame.PointBottomRight + t * (sourceFrame.PointBottomLeft - sourceFrame.PointBottomRight));
}
// DA
if (Math.Abs(nA - nD) > Constants.Epsilon)
{
t = (nP - nD) / (nA - nD);
if (t > 0 && t <= 1)
lstProj.Add(sourceFrame.PointBottomLeft + t * (sourceFrame.PointTopLeft - sourceFrame.PointBottomLeft));
}
if (lstProj.Count != 2)
return false;
// 从空间坐标系返回平面坐标系
startPoint = destinationFrame.TransformPatientPointToImage(lstProj[0]);
endPoint = destinationFrame.TransformPatientPointToImage(lstProj[1]);
return true;
}
得到坐标之后就可以利用绘图操作类(参考本系列教程之图形标记)来自己绘制定位线。
看效果:
对于较复杂的身体部位,也可以同时绘制定位线范围,来确定当前序列的定位范围,思路是先计算第一帧和最后一帧,用黄色虚线标出,再计算当前帧。
看效果:
C#开发PACS、RIS、3D医学影像处理系统系列教程 目录整理:
菜鸟入门篇
C#开发PACS医学影像处理系统(七):读取影像Dicom信息
C#开发PACS医学影像处理系统(十):Dicom影像下载策略与算法
C#开发PACS医学影像处理系统(十一):Dicom影像挂片协议
C#开发PACS医学影像处理系统(十二):绘图处理之图形标记
C#开发PACS医学影像处理系统(十三):绘图处理之病灶测量
C#开发PACS医学影像处理系统(十四):处理Dicom影像窗宽窗位
C#开发PACS医学影像处理系统(十五):Dicom影像交叉定位线算法
C#开发PACS医学影像处理系统(十六):2D处理之影像平移和缩放
C#开发PACS医学影像处理系统(十七):2D处理之影像旋转和翻转
医学影像三维篇
C#开发PACS医学影像三维重建(一):使用VTK重建3D影像
C#开发PACS医学影像三维重建(二):使用VTK进行体绘制
C#开发PACS医学影像三维重建(三):纹理映射与颜色传输
C#开发PACS医学影像三维重建(四):3D网格平滑效果
C#开发PACS医学影像三维重建(五):基于梯度透明的组织漫游
C#开发PACS医学影像三维重建(六):三维光源与阴影效果
C#开发PACS医学影像三维重建(七):空间测量与标注
C#开发PACS医学影像三维重建(八):VR体绘制
C#开发PACS医学影像三维重建(九):MPR三视图切面重建
C#开发PACS医学影像三维重建(十):MIP最小密度投影
C#开发PACS医学影像三维重建(十一):CPR曲面重建
C#开发PACS医学影像三维重建(十二):VE虚拟内镜技术
熟手进阶篇
C#处理医学影像(一):基于Hessian矩阵的血管肺纹理骨骼增强对比
C#处理医学影像(二):基于Hessian矩阵的医学影像增强与窗宽窗位
胶片打印:
C#开发医学影像胶片打印系统(二):胶片打印机通讯
C#开发医学影像胶片打印系统(三):Pacs二维功能在排版中的应用
登峰造极篇
C#开发基于Python人工智能的肺结节自动检测
C#开发基于Python人工智能的脊柱侧弯曲率算法
C#开发基于Python机器学习的医学影像骨骼仿真动画
C#开发基于Python机器学习的术后恢复模拟
C#开发基于U3D的VR眼镜设备虚拟人体三维重建
C#开发基于全息投影的裸眼3D医学影像显示技术
免费下载
















 899
899











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









