






基于BP神经网络的室内声源定位算法的实现(附有程序)
- 问题描述
现在有一个安静的房子,有一个人在房间里走动,我要利用屋里的麦克风接收这个人的脚步声,然后对这个人进行定位。 - 研究的意义
声源定位可以克服视觉定位的缺点,对看不见的地方也可以定位,在机器人追踪与探测方面得到了很好的应用。室内声源定位被广泛应用于视频会议、智能家居、车载通话设备等场景中。特别是在人工智能时代,结合机器学习和深度学习,室内声源定位问题的应用价值变得非常大。 - 问题的研究方法
目前解决这个问题的主流方法有三个,分别是基于最大输出功率的可控波束形成技术、基于高分辨率谱估计技术、基于声达时间差的定位技术。这三种方法都是通过研究声音的物理性质,建立相应的方程,然后进行求解,过程复杂,求解难度高。
基于上述原因,本文从人工智能的角度考虑,我们把声音在室内空间的混乱场当成一个黑匣子,只分析输入输出的数据特征,从而找到普遍的规律,达到解决问题的目的。本文利用的人工智能算法是BP神经网络算法,下面将按照正常人的逻辑思维顺序,一步一步介绍算法的实现。 - 摘要
本文设计了离线采样方案,构建了隐含层为7个神经元的网络结构,利用 LevenBerg-Marquardt的BP算法作为训练函数,编写了matlab程序用模拟定位,实现了在100平方米的房子里,只需要采样100组数据进行机器训练,就可以将定位误差控制在几厘米的效果。 - 模型的建立
(1)离线采样方案
在建立神经网络之前,我们要先设计出采样模型,分别得到输入数据和输出数据的形式,才能具体的设计神经网络,因此,下面先设计采样模型,再设计网络模型。
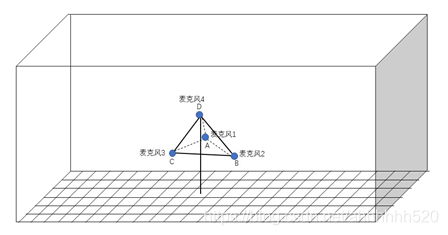
如上图所示,我先对将地面划分为n个小区域,用发声装置分别在每一个小区域的中心点坐标处发声一次,每发声一次,就用四个麦克风记录下时间差,,只需要三个时间差即可,分别为

这样,我们能得到n组数据,第i组数据如下所示:

其中x_i,y_i分别代表地面横坐标值和纵坐标值。这n组数据就可以作为BP神经网络的训练数据,离线采样操作就完成了。
(2)BP神经网络的构建
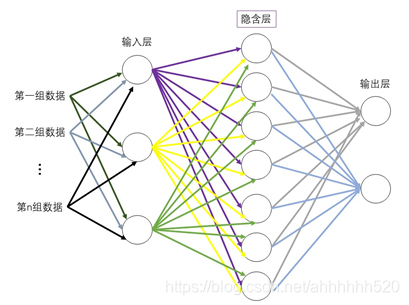
离线采样之后,我们就可以构建BP神经网络了。因为输入数据是三个分量,输出数据是两个分量,所以构建的BP神经网络的输入层与输出层分别是三个单位和两个单位。通过不断测试,我得出当隐含层含有7个神经元时,预测结果最佳。网络结构如下图所示。
构建了神经网络的结构,接下来我们要确定的是使用什么激活函数,训练算法和性能函数。在一般情况下,隐含层都是用S形激活函数,输出层都是用线性激活函数,此处的用法也是如此。由于用梯度下降法训练函数构建的网络速度比较慢,而基于LevenBerg-Marquardt算法的训练网络的速度非常快,所以我们使用LevenBerg-Marquardt的BP算法训练函数。由于我们要考虑的是网络的整体性能,所以我们使用的性能函数是均方误差函数。 - 数值模拟训练和定位测试
不妨假设房子是个标准的长方体,它的长、宽、高分别为10米、10米、5米,四个麦克风在空间中构成一个四面体,假设四个麦克风在空间的坐标分别为A(4.9,4.9,1.0)、B(4.9,5.1,1.0)、C(5.1,5.1,1.0),D(5.0,5.0,2.0)。地面面积为100平方米,取每一个小区域面积为1平方米,则可得到100组训练数据。将这100组训练数据用BP神经网络算法进行机器学习之后,下面就可以用BP神经网络进行定位测试了。
接下来我们就可以想一下怎么进行定位测试了,首先,我们将声源随机放置在房间中,即用计算机模拟一个的随机位置坐标,然后根据声音的传播速度,可以求出各个麦克风首次接受到声音的时间差,将这组时间差作为定位测试的输入数据,用已经训练好的BP神经网络进行预测,得到预测值,然后再分析预测位置与真实位置的误差。
在100平方米的房间里,我们只用了100组训练数据,重复10次定位操作,得到的预测位置与实际位置的关系如下表所示。
测试次数 声源的实际位置 BP神经网络的预测位置

误差分析如下图所示。

机器训练的结果分析如下图所示。

可以看出,用BP神经网络算法对100平方米的室内进行声源定位,只需要采集100组训练数据,就可以使预测位置与实际位置的误差只有几厘米。从机器训练的结果可以看出,整个定位过程所用时间非常短,收敛速非常快,均方误差已经达到了4×10^(-6)米。 - matlab程序代码
%% 清空环境变量
clc
clear
%% 生成训练数据与预测数据
%%%训练数据
A=[4.9,4.9,1];%%%麦克风A的坐标
B=[4.9,5.1,1];%%%麦克风B的坐标
C=[5.1,5.1,1];%%%麦克风C的坐标
D=[5.0,5.0,2];%%%麦克风D的坐标
%x=0.5:1:9.5;y=0.5:1:9.5;%%%用100组数据训练
x=0.5:0.5:10;y=0.5:0.5:10;%%%用400组数据训练
[X,Y]=meshgrid(x,y);
tAB=(sqrt((A(1)-X).^2+(A(2)-Y).^2+A(3).^2)-sqrt((B(1)-X).^2+(B(2)-Y).^2+B(3).^2)); %%%声源到A,B两个麦克风的时间差,下同
tBC=(sqrt((B(1)-X).^2+(B(2)-Y).^2+B(3).^2)-sqrt((C(1)-X).^2+(C(2)-Y).^2+C(3).^2));
tCD=(sqrt((C(1)-X).^2+(C(2)-Y).^2+C(3).^2)-sqrt((D(1)-X).^2+(D(2)-Y).^2+D(3).^2));
ttAB=tAB(:)';
ttBC=tBC(:)';
ttCD=tCD(:)';
input_train=[ttAB;ttBC;ttCD];%%%训练数据的输入值(是麦克风接受声音的时间差)
XX=X(:)';
YY=Y(:)';
output_train=[XX;YY];%%%训练数据的输出值(是位置坐标)
%%%预测数据
m=10; %%%预测m个位置(就是分别将声源放到m个位置,用BP神经网络算法预测,然后对比预测结果和实际结果)
X=rand(1,m)*10;
Y=rand(1,m)*10;
tAB=(sqrt((A(1)-X).^2+(A(2)-Y).^2+A(3).^2)-sqrt((B(1)-X).^2+(B(2)-Y).^2+B(3).^2));
tBC=(sqrt((B(1)-X).^2+(B(2)-Y).^2+B(3).^2)-sqrt((C(1)-X).^2+(C(2)-Y).^2+C(3).^2));
tCD=(sqrt((C(1)-X).^2+(C(2)-Y).^2+C(3).^2)-sqrt((D(1)-X).^2+(D(2)-Y).^2+D(3).^2));
input_test=[tAB;tBC;tCD];%%%预测数据的输入值(是麦克风接受声音的时间差)
real_locate=[X;Y];%%%真实的声源坐标,用于检验预测值是否正确
%% 数据归一化
[inputn,inputps]=mapminmax(input_train); %%%其中inputps是用于记录数据归一化方法
[outputn,outputps]=mapminmax(output_train); %%%outputps同理
%% BP网络训练
% %初始化网络结构
net=newff(inputn,outputn,7);%%%建立一个由7个神经元组成的隐藏层构成了一个网络,这是新版matlab的用法
net.trainParam.epochs=5000;%%%最大迭代次数
net.trainParam.lr=0.1;%%%学习率
net.trainParam.goal=0.000004;%%%目标误差
net.trainParam.max_fail=10000;
%网络训练
net=train(net,inputn,outputn);
%% BP网络预测
%预测数据归一化
inputn_test=mapminmax('apply',input_test,inputps);%%%对测试数据再进行数据归一化,之前是对训练数据进行数据归一化,而且归一化方式和前面的一样
%网络预测输出
an=sim(net,inputn_test); %训练输出的结果
%网络输出反归一化
BPoutput=mapminmax('reverse',an,outputps);%%反归一化得到实际结果
%% 结果分析
for i=1:m
fprintf('第%d 次测试的实际位置是:(%d,%d)',i,real_locate(:,i));fprintf('\n');
fprintf('BP神经网络预测位置是:(%d,%d)',BPoutput(:,i));fprintf('\n');
end
%%%画图
plot(real_locate(1,:),real_locate(2,:),'*')
hold on
plot(BPoutput(1,:),BPoutput(2,:),'o')
legend('实际位置','预测位置')
title('BP网络预测输出','fontsize',12)
ylabel('Y方向','fontsize',12)
xlabel('X方向','fontsize',12)
%%%误差分析(预测位置的分量与实际位置的分量做差取绝对值再相加)
figure(2)
r=real_locate-BPoutput;
r=abs(r(1,:))+abs(r(2,:));
plot(r,'-*')
title('BP网络预测误差','fontsize',12)
legend('误差')
ylabel('误差(单位/米)','fontsize',12)
xlabel('位置','fontsize',12)
本来想给你上传程序文件的,但是我还不会怎么上传了程序文件,所以等我之后上传了再来这里给链接吧。


















 1049
1049

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











