






点击下方卡片,关注“CVer”公众号
AI/CV重磅干货,第一时间送达
扫码加入CVer学术星球,可以获得最新顶会/顶刊上的论文idea和CV从入门到精通资料,以及最前沿项目和应用!发论文搞科研,强烈推荐!

在CVer微信公众号后台回复:论文,即可下载论文pdf和代码链接!快学起来!
论文地址:
https://openaccess.thecvf.com/content/CVPR2023/papers/Feng_AeDet_Azimuth-Invariant_Multi-View_3D_Object_Detection_CVPR_2023_paper.pdf
主页:https://fcjian.github.io/aedet
代码:https://github.com/fcjian/AeDet
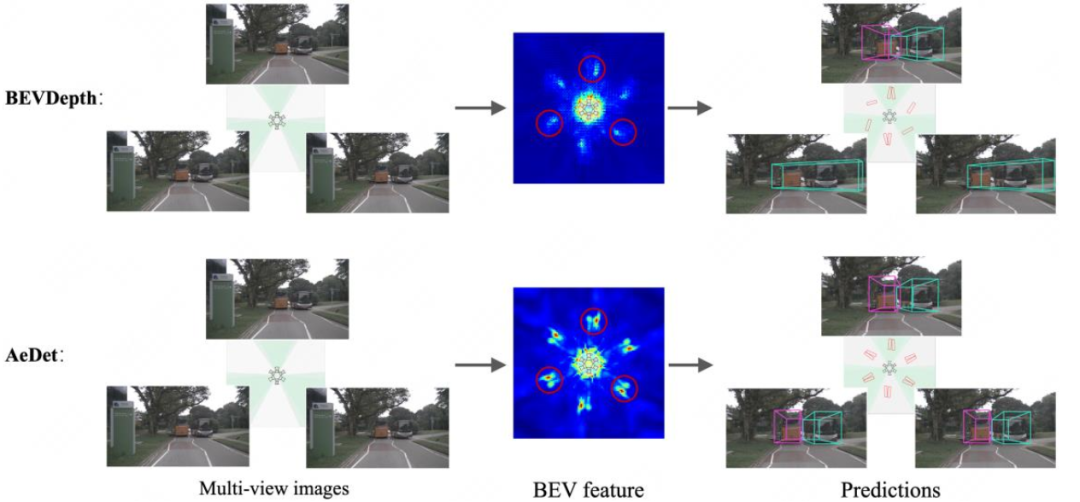
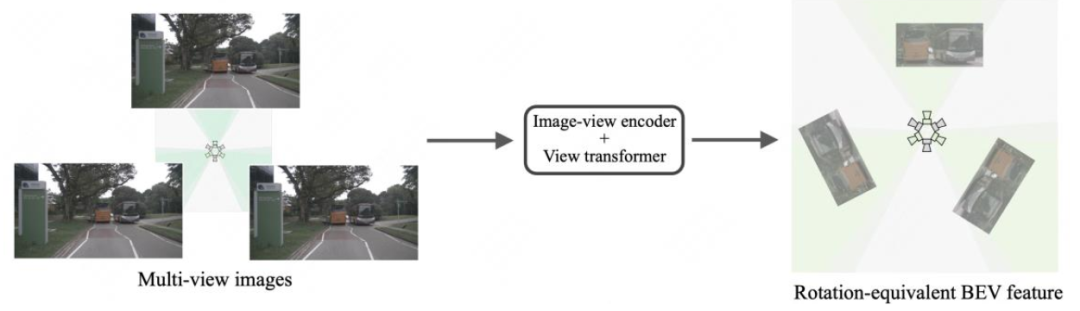
本文提出了一种名为AeDet的方位角等变检测器,它能够实现方位不变的多视图3D目标检测。如下图所示,假设不同方位的摄像机在不同时刻捕获到相同的场景,现有方法(以BEVDepth为例)在不同方位下对相同的公交车产生不同的BEV特征和预测结果,而AeDet则在不同方位下对相同的公交车产生几乎相同的BEV特征和预测结果:
问题
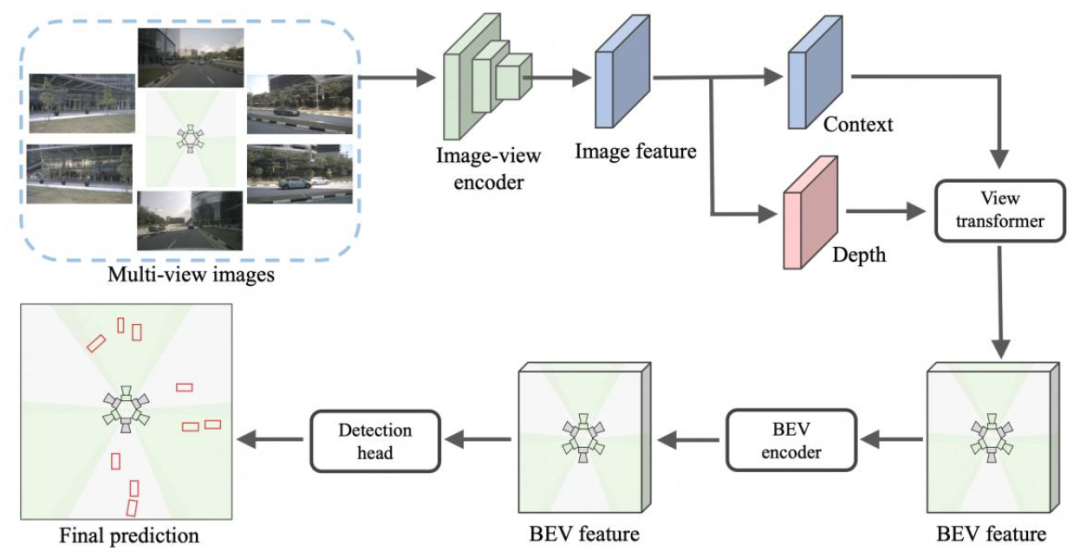
现有的基于Lift-Splat-Shoot(LSS)的多视图3D目标检测器 (如BEVDepth) 通常由图像编码器 (Image-view encoder)、视角转换器 (View transformer)、BEV编码器 (BEV encoder) 和检测头 (Detection head) 组成:
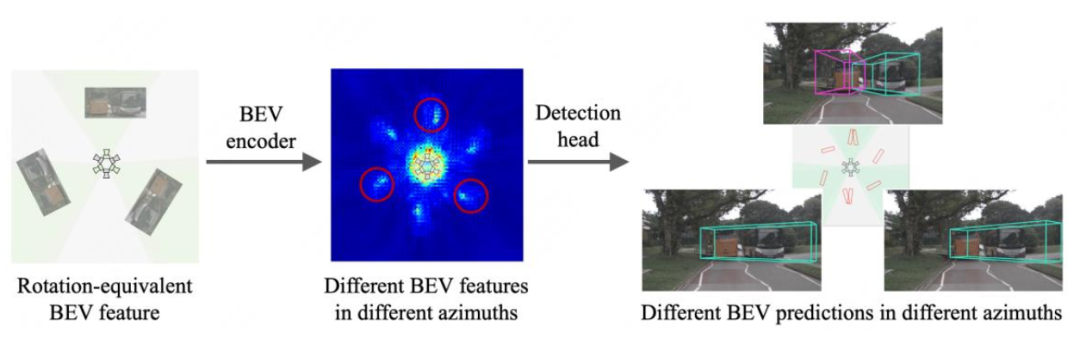
我们基于BEVDepth进行了一项简单的实验:我们假设不同方位的摄像机在不同时刻捕获到相同的场景,即将相同的图像作为6个视图的输入(为了简明,本文的可视化只展示3个视图)。令人惊讶的是,BEVDepth在不同方位下对相同物体(即下图的公交车)生成了不同的BEV特征和检测结果:
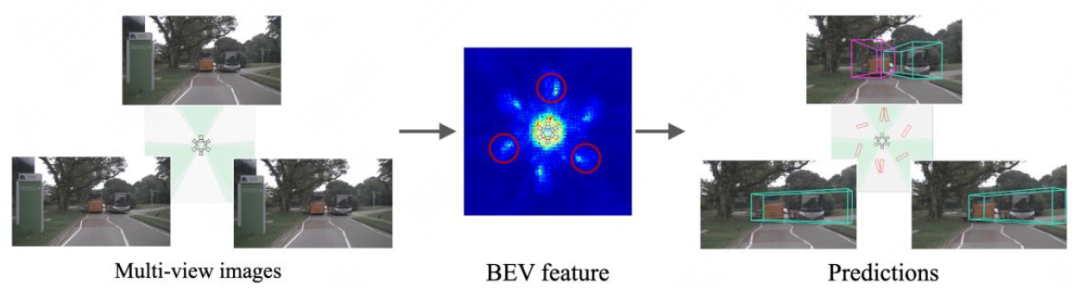
我们逐个模块分析导致上述结果的原因。图像编码器和视角转换器会分别处理不同方位的图像,因此可将图像转换为旋转等变的BEV特征(即径向对称性),如下图所示:
然而,BEV编码器和检测头使用传统的卷积和无锚检测头来进行BEV感知。这种设计忽略了BEV特征的径向对称性,导致在不同方位下对相同的物体产生不同的特征和预测:
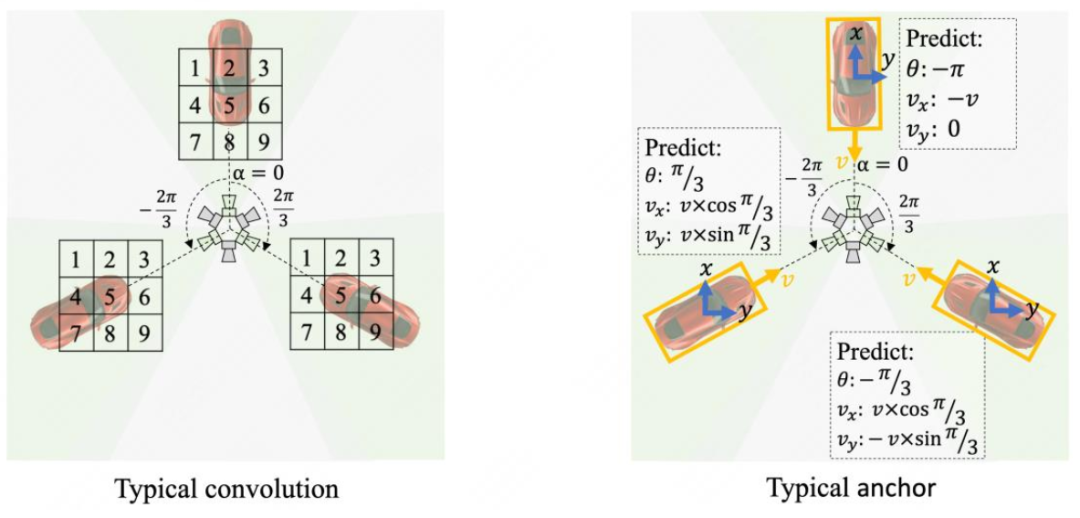
具体来说,传统的卷积编码器和无锚检测头在BEV感知中存在以下两个问题:
1.如下方左图所示,传统的卷积编码器在特征的每个位置使用相同的采样网格,因此对于旋转等变的BEV特征,它在不同的方位下会采样和生成不同的BEV特征。
2.如下方右图所示,传统的检测头沿着笛卡尔坐标(蓝色箭头)预测物体的方向和速度,这导检测头需要针对不同方位的相同物体预测不同的目标。
方法
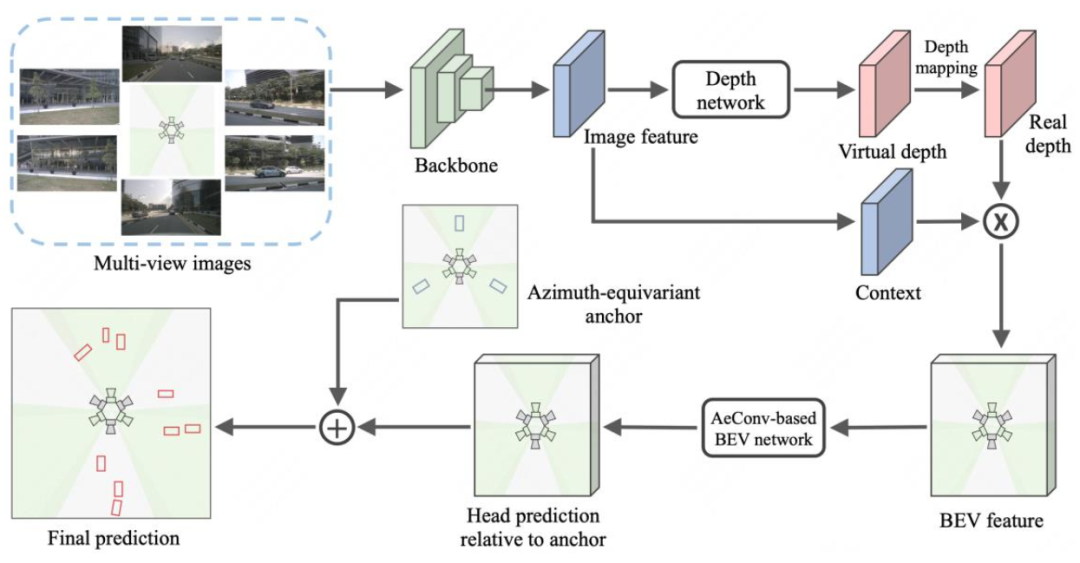
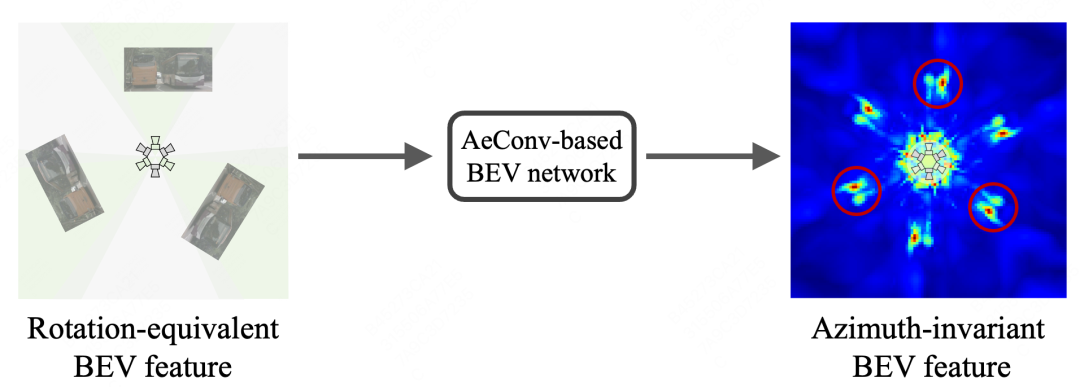
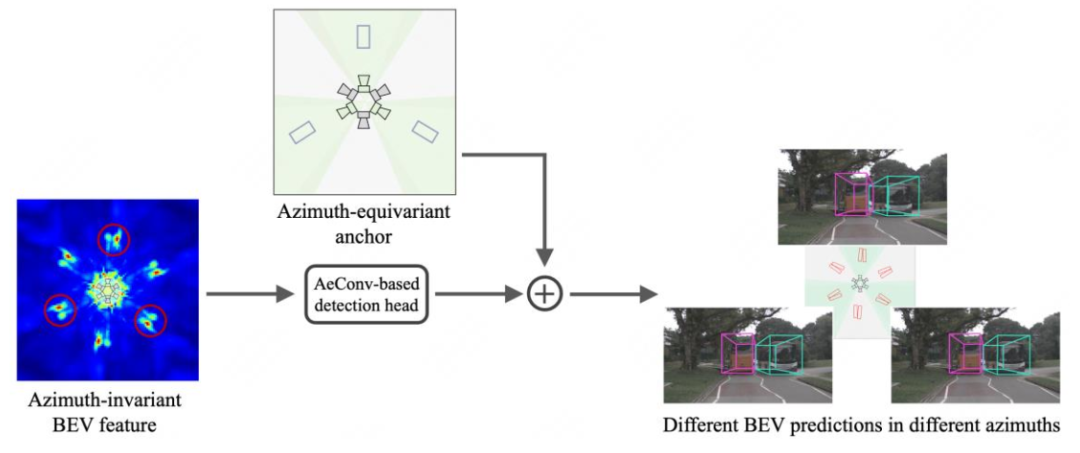
本文提出了一个方位等变的多视图3D目标检测器AeDet,旨在统一不同方位下的BEV感知(即表示学习和预测),提高检测性能。该方法通过图像编码器和视角转换器处理多视角图像,生成具有径向对称性的BEV特征。随后,利用基于方位角等变卷积(AeConv)的BEV网络进一步编码方位不变的BEV特征,并基于方位角等变锚来预测方位不变的检测结果:
学习方位不变的BEV特征
方位角等变卷积(AeConv):为了统一对不同方位的BEV特征学习,我们提出了一种名为AeConv的方位角等变卷积,用于提取沿相机径向的BEV表示。根据每个位置的方位角,我们将传统卷积的规则采样网格相应地旋转,并基于旋转后的采样网格进行卷积运算:
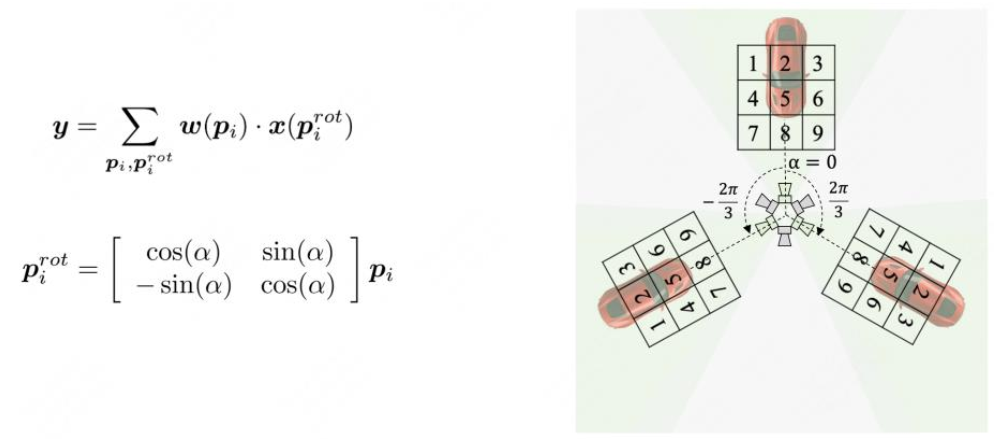
值得注意的是,旋转的采样网格始终是径向的(如上图所示)。因此,即使在不同的方位,AeConv也能够采样并学习相同的BEV特征,即方位角不变的表示。我们使用AeConv替代传统的卷积,构建基于AeConv的BEV网络,以进一步编码方位不变的BEV特征:
预测方位不变的目标
方位角等变锚:我们根据每个位置的方位角重新定义了方位角等变锚;然后根据方位角等变锚的方向(蓝色箭头)计算检测框和速度的残差,得到与方位无关的预测目标:
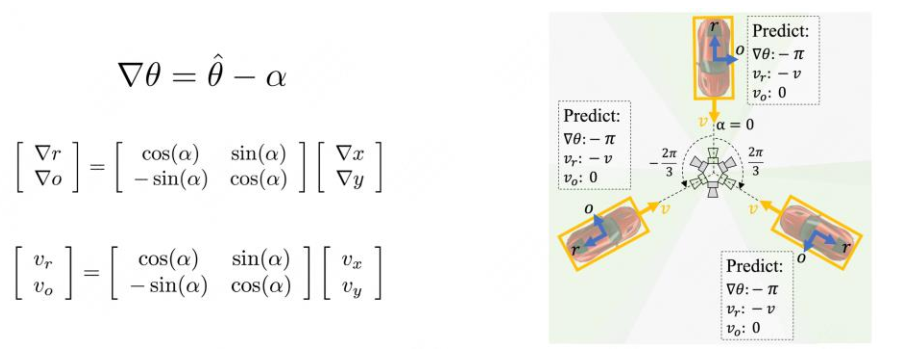
值得注意的是,方位角等变锚的方向总是在相机的径向上。因此,检测头可以根据方位等变的方向来预测目标的朝向、中心偏移量和速度,从而得到与方位无关的预测目标和结果:
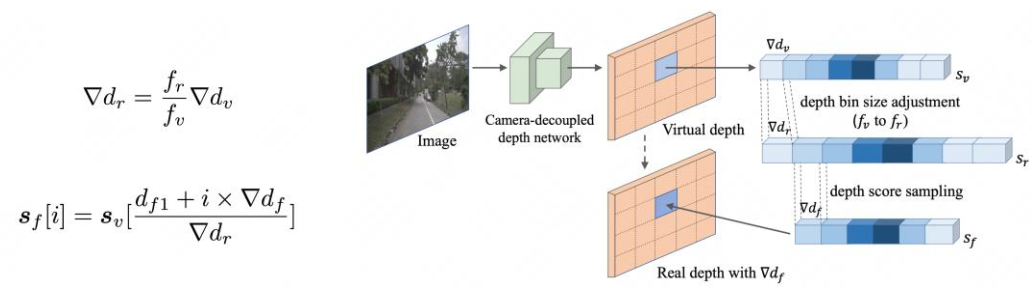
相机解耦的虚拟深度
此外,我们还引入了一个与相机解耦的虚拟深度,用于对具有不同相机内参的图像进行统一的深度预测。具体来说,我们首先使用相机解耦的深度网络来预测以虚拟焦距为基准的虚拟深度;然后,根据经典的摄像机模型,将虚拟深度转换为真实深度:
实验
与SOTA比较
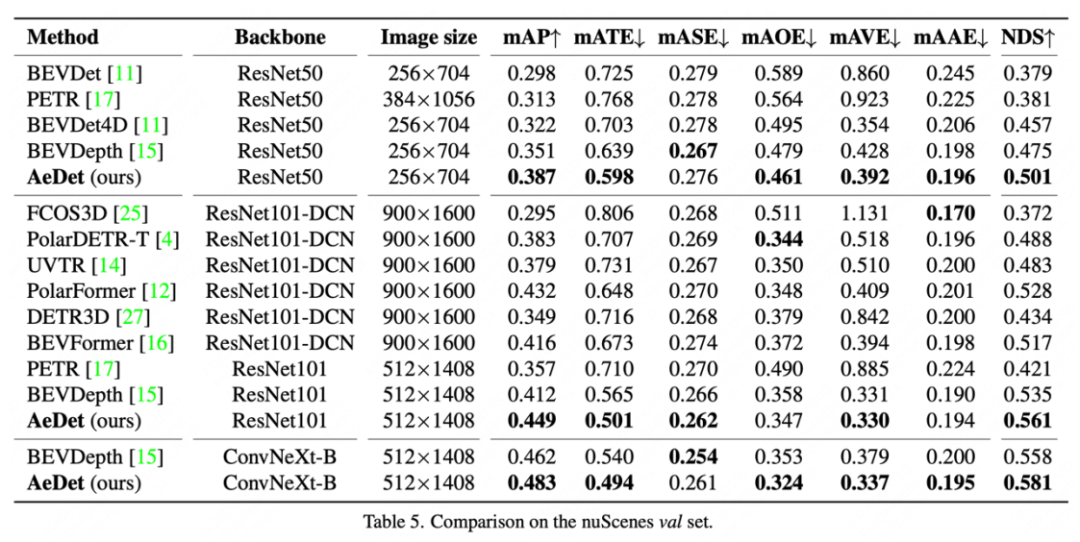
在nuScenes验证集上的比较中,AeDet使用ResNet-50和ResNet-101分别实现了50.1%的NDS和56.1%的NDS,在性能上超过了当前的多视图3D目标检测器,如BEVFormer(超过4.4%)和BEVDepth(超过2.6%)。
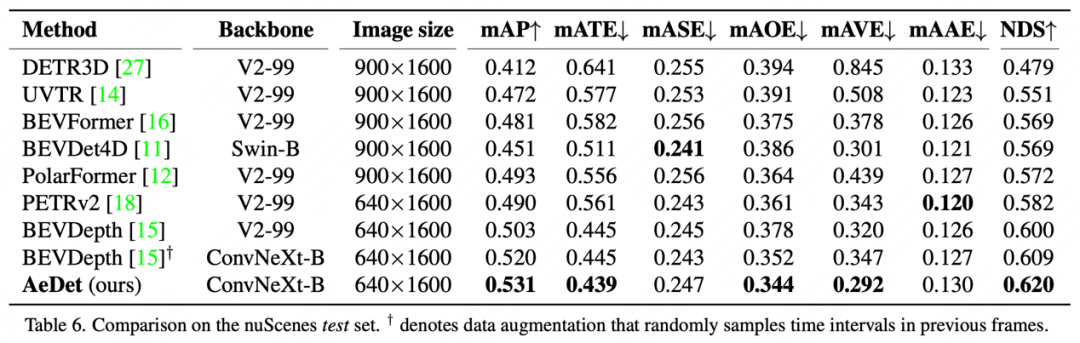
在nuScenes测试集上的比较中,AeDet将mAOE和mAVE分别提高了3.4%和2.8%,并以53.1%的mAP和62.0%的NDS在多视图3D目标检测方面取得了最新的先进结果。
消融实验
与基准BEVDepth相比,AeNet(方位角等变卷积和方位角等变锚)在参数数量相同的情况下,仅增加了1.7%的FLOPs,将NDS提高了2个百分点(从44.2%增加到46.2%)。此外,相机解耦的深度网络(CDN)可提高1.5%的mAP和1.2%的NDS。

旋转测试
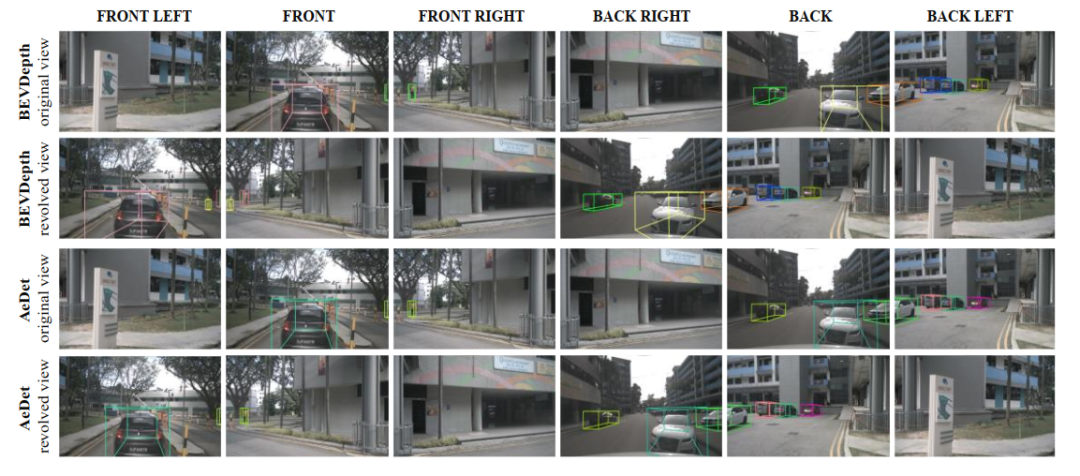
不同方位的检测鲁棒性对于自动驾驶系统非常重要,因为车辆有时可能会进行大角度转弯。例如,在小型环形交叉路口或拐角处,车辆的转向角度变大,导致摄像头方向发生巨大变化。自动驾驶车辆在不同的朝向下都应当保持准确的检测性能。为验证检测器的鲁棒性,我们提出了旋转测试来模拟这种情形:我们将车辆顺时针旋转60度,获取旋转视图,并在该视图中评估检测器。如下表/图所示,在旋转视图下,BEVDepth产生了与原始视图不同的预测结果,其性能下降了4.6% NDS,而AeDet在原始视图和旋转视图中产生几乎相同的预测结果。

总结
1.本文提出了一种名为AeDet的检测器,旨在实现方位不变的多视图3D目标检测。AeDet采用了多种创新技术,包括方位角等变卷积(AeConv)和方位角等变锚,以实现方位不变的BEV感知,并采用相机解耦的虚拟深度来统一不同相机的深度预测。
2.在nuScenes数据集上,AeDet取得了显著的性能提升,达到了62.0% NDS,超越了现有方法,特别是在物体的方向和速度预测方面实现了卓越的改进。
3.这项工作强调了方位角等变卷积和方位角等变锚在提高3D目标检测性能方面的有效性,尤其是在多相机视图下。
在CVer微信公众号后台回复:论文,即可下载论文pdf和代码链接!快学起来!
CVPR / ICCV 2023论文和代码下载
后台回复:CVPR2023,即可下载CVPR 2023论文和代码开源的论文合集
后台回复:ICCV2023,即可下载ICCV 2023论文和代码开源的论文合集计算机视觉和Transformer交流群成立
扫描下方二维码,或者添加微信:CVer444,即可添加CVer小助手微信,便可申请加入CVer-计算机视觉或者Transformer 微信交流群。另外其他垂直方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索、论文投稿&交流、PyTorch、TensorFlow和Transformer、NeRF等。
一定要备注:研究方向+地点+学校/公司+昵称(如目标检测或者Transformer+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群▲扫码或加微信号: CVer444,进交流群
CVer计算机视觉(知识星球)来了!想要了解最新最快最好的CV/DL/AI论文速递、优质实战项目、AI行业前沿、从入门到精通学习教程等资料,欢迎扫描下方二维码,加入CVer计算机视觉(知识星球),已汇集近万人!
▲扫码加入星球学习▲点击上方卡片,关注CVer公众号

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









