






点击下方卡片,关注“CVer”公众号
AI/CV重磅干货,第一时间送达
扫码加入CVer学术星球,可以获得最新顶会/顶刊上的论文idea和CV从入门到精通资料,以及最前沿项目和应用!发论文搞科研,强烈推荐!

作者:周俊昇 | 已授权CVer转载(源于知乎)
https://zhuanlan.zhihu.com/p/678856210
我们近期的工作:3D视觉大模型Uni3D在ICLR 2024的评审中获得了688分,被选为Spotlight Presentation
在本文中,我们第一次将3D基础模型成功scale up到了十亿(1B)级别参数量,并使用一个模型在诸多3D下游应用中取得SoTA结果。代码和各个scale的模型(从6M-1B)均已开源,欢迎大家关注和使用:
论文:https://https://arxiv.org/pdf/2310.06773
代码:https://https://github.com/baaivision/Uni3D
我们主要探索了3D视觉中scale up模型参数量和统一模型架构的可能性。在NLP / 2D vision领域,scale up大模型(GPT-4,SAM,EVA等)已经取得了很impressive的结果,但是在3D视觉中模型的scale up始终没有成功。我们旨在将NLP/2D中scale up的成功复现到3D表征模型上。
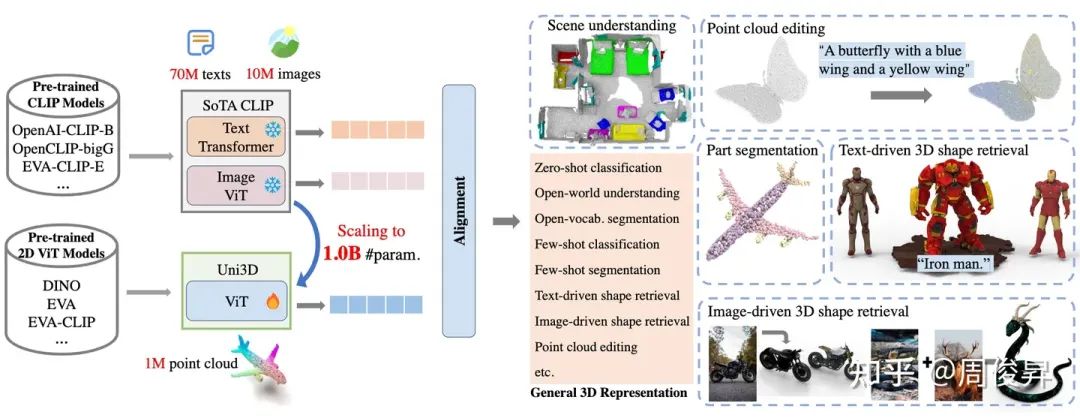
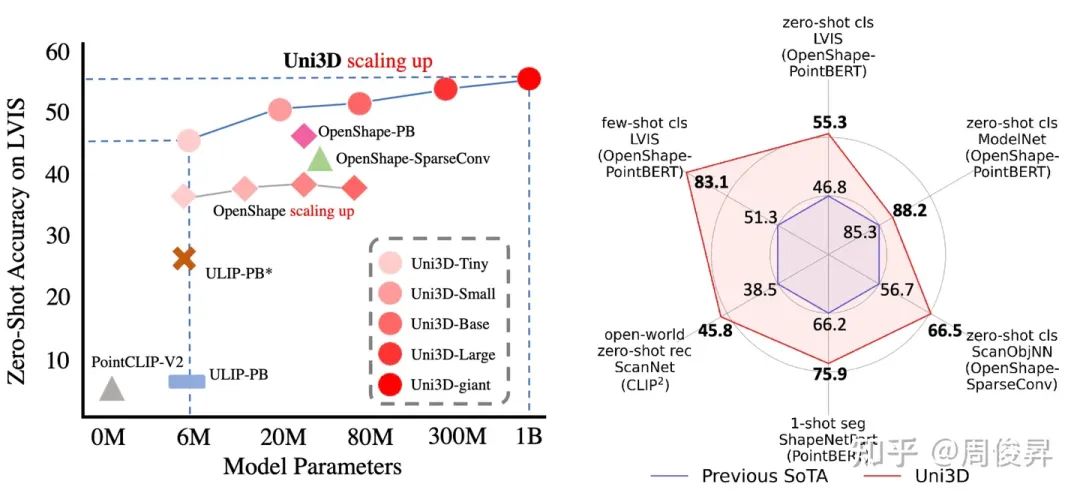
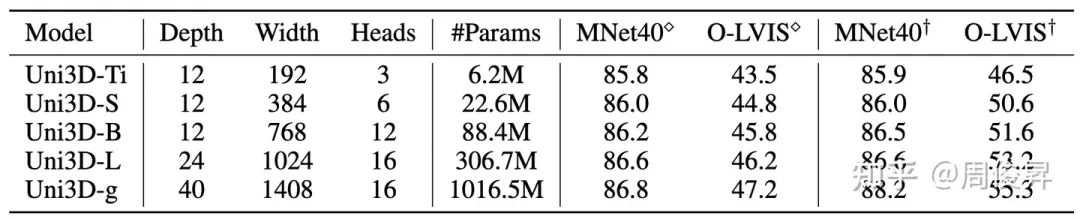
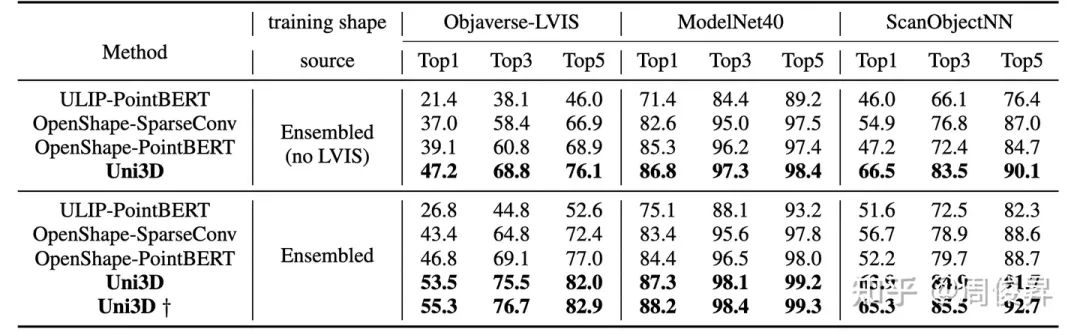
在这项工作中,我们提出了一个3D基础大模型Uni3D,直接将3D backbone统一为ViT(Vision Transformer),以此利用丰富和强大的2D预训练大模型作为初始化。Uni3D使用CLIP模型中的文本/图像表征作为训练目标,通过学习三个模态的表征对齐(点云-图像-文本)实现3D点云对图像和文本的感知。同时,通过使用ViT中成功的scale up策略,我们将Uni3D逐步 scale up,训练了从Tiny到giant的5个不同scale的Uni3D模型,成功地将Uni3D扩展到10亿级别参数。
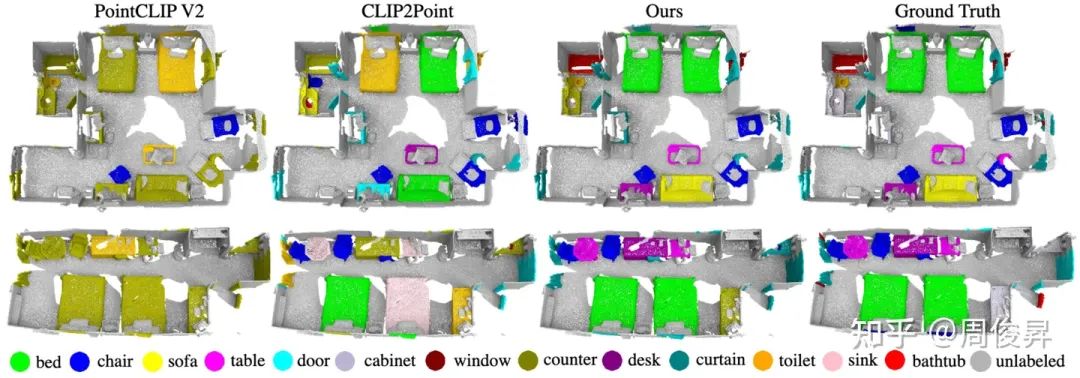
Uni3D在多个3D任务上达到SoTA,如:zero-shot classification, few-shot classification,open-world understanding, open-world part segmentation.
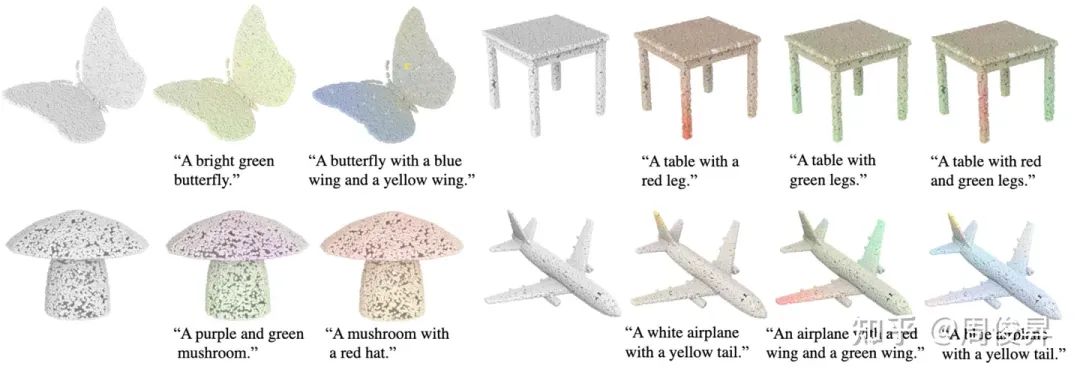
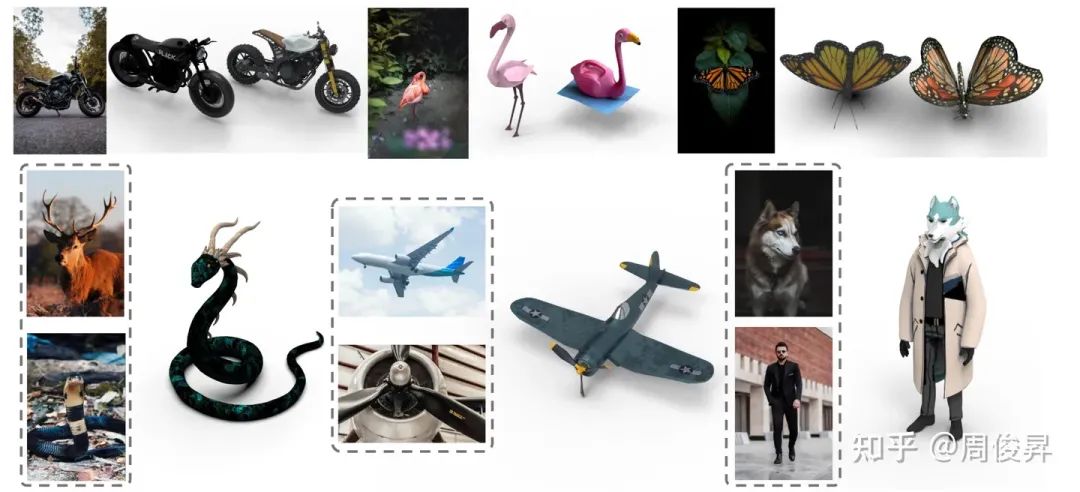
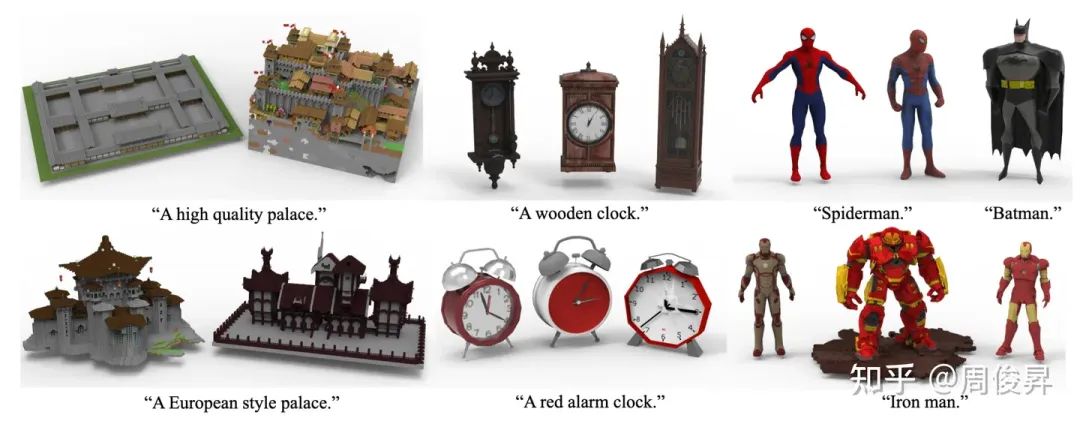
由于学到了强大的多模态表征能力,Uni3D还能够做一些有意思的应用,如point cloud painting(点云绘画),text/image-based 3D shape retrieval(基于图像/文本的3D模型检索),point cloud captioning(点云描述):

在CVer微信公众号后台回复:论文,即可下载论文pdf和代码链接!快学起来!
3D视觉交流群成立
扫描下方二维码,或者添加微信:CVer444,即可添加CVer小助手微信,便可申请加入CVer-3D视觉微信交流群。另外其他垂直方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索、论文投稿&交流、PyTorch、TensorFlow和Transformer、NeRF等。
一定要备注:研究方向+地点+学校/公司+昵称(如3D视觉+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群▲扫码或加微信号: CVer444,进交流群
CVer计算机视觉(知识星球)来了!想要了解最新最快最好的CV/DL/AI论文速递、优质实战项目、AI行业前沿、从入门到精通学习教程等资料,欢迎扫描下方二维码,加入CVer计算机视觉(知识星球),已汇集近万人!
▲扫码加入星球学习▲点击上方卡片,关注CVer公众号
整理不易,请点赞和在看














 5405
5405











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









