






分享一个新兴又活跃的方向:LSTM+卡尔曼滤波。核心思想是结合两者各自优势(LSTM的时序建模能力+卡尔曼滤波的动态状态估计),以提高系统的性能和准确性,非常适用于多种时间序列预测和状态估计任务。
这方向属于深度学习与传统滤波算法的交叉领域,目前处于技术上升期,在自动驾驶、无人机跟踪、传感器融合等领域都有很大需求,论文发表潜力高,且容易结合具体场景提出创新方案。
这边推荐从参数自适应、噪声建模、多传感器融合等入手做创新,未来也可考虑模型可解释、训练数据需求、参数耦合问题...如果需要参考,可以看我整理的12篇LSTM+卡尔曼滤波前沿论文,无偿分享,觉得有用点个赞支持一下~
扫码添加小享,回复“长短卡尔曼”
免费获取全部论文+开源代码

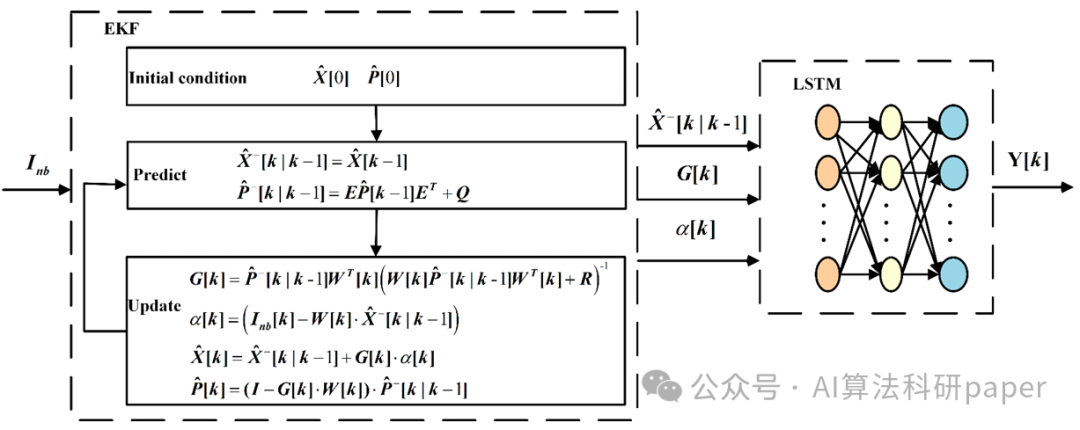
Performance enhancement of diffuse fluorescence tomography based on an extended Kalman filtering-long short term memory neural network correction model
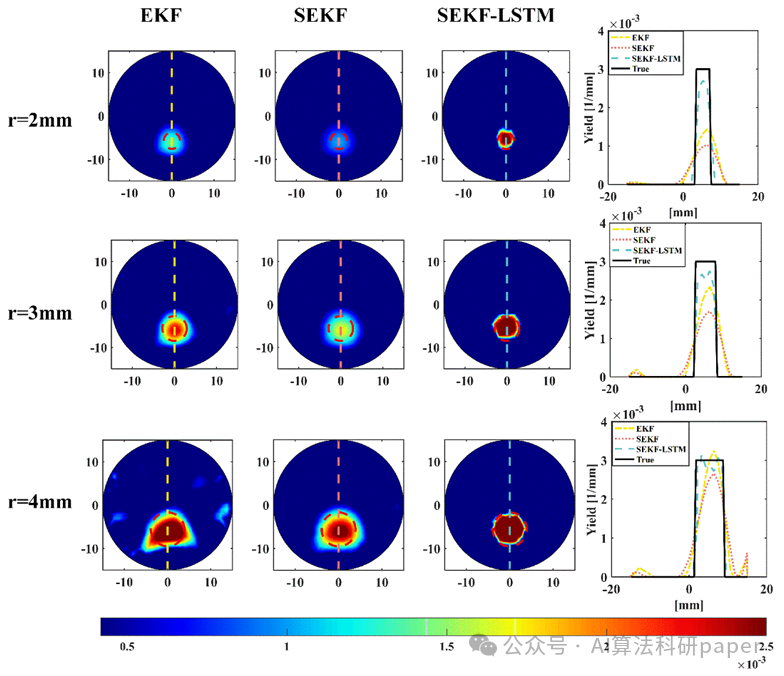
方法:本文提出了一种结合半迭代扩展卡尔曼滤波(SEKF)和长短期记忆网络(LSTM)的后处理算法,以改善漫射荧光断层成像(DFT)的图像重建质量和速度,通过数值模拟、人体模型和体内实验验证其性能。
创新点:
结合半迭代扩展卡尔曼滤波(SEKF)与长短期记忆(LSTM)神经网络的后处理算法,显著提高了漫射荧光层析成像(DFT)重建的图像质量和成像速度。
SEKF-LSTM算法在体内实验中实现了最高的对比噪声比(CNR)和最接近真实值的半高全宽(FWHM),这表明其具备最佳的抗噪能力和高空间分辨率。
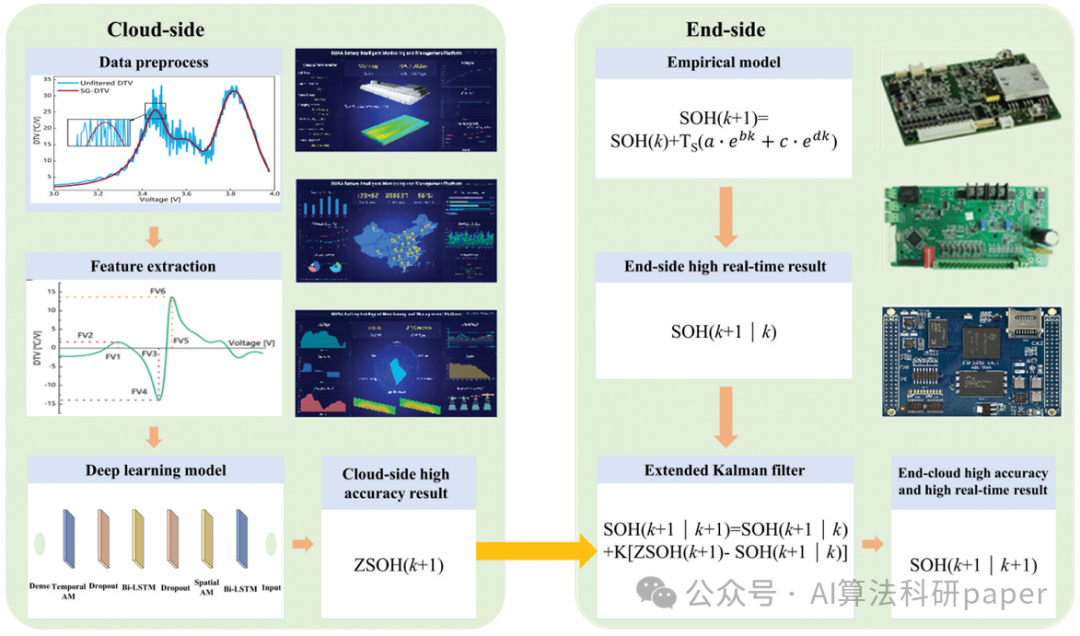
An end-cloud collaboration approach for state-ofhealth estimation of lithium-ion batteries based on biLSTM with collaboration of multi-feature and attention mechanism
方法:文章介绍了一种基于端云协作的锂离子电池健康状态估计方法,其中涉及到了双向长短期记忆网络(Bi-LSTM)和扩展卡尔曼滤波(Extended Kalman Filter, EKF)的结合。在NASA数据集上的实验证明了其高精度和实时监测潜力。
创新点:
通过整合独立成分分析(ICA)和差分热伏安法(DTV),从电池老化过程中提取出与电池衰退高度相关的特征。这些特征的提取和使用增强了输入数据的稳健性和信息量。
提出了端云协作的架构,通过在端侧实施快速经验模型和在云侧部署高精度深度学习模型,实现了实时性和高精度的平衡。

扫码添加小享,回复“长短卡尔曼”
免费获取全部论文+开源代码

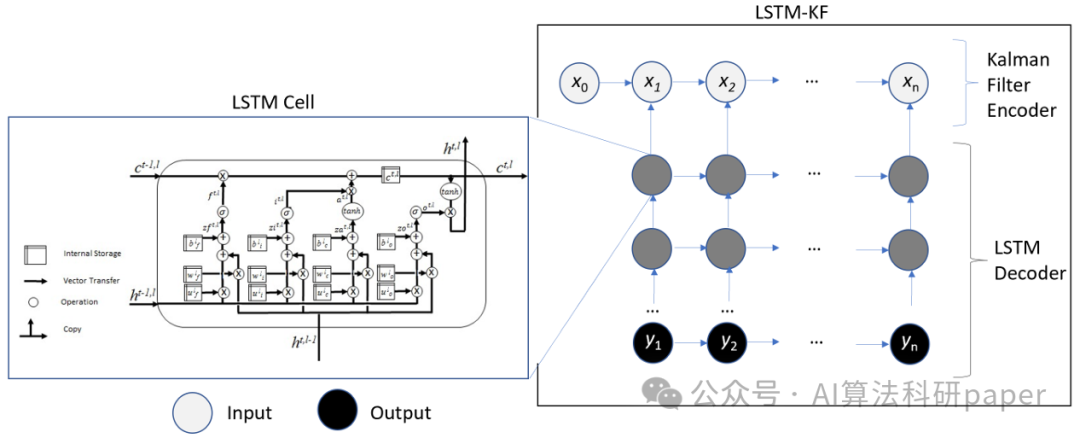
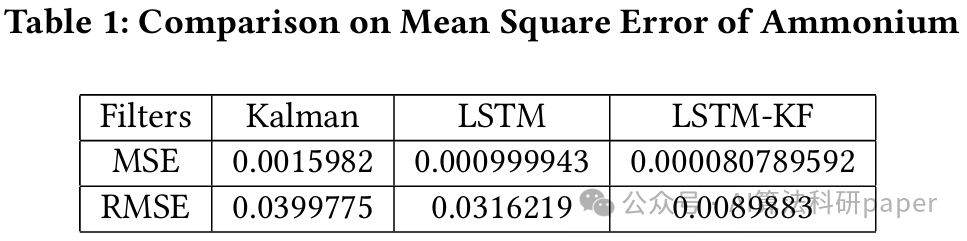
A Noise Suppression of LSTM algorithm combined with Kalman filter for Agriculture Automation
方法:论文提出了一种结合LSTM和卡尔曼滤波器的新型噪声抑制算法(LSTM-KF),用于农业自动化中的数据流噪声过滤。通过结合两者的优势,显著降低了均方误差(MSE),从而在大规模水产养殖自动化系统中实现了更高效、更精准的噪声抑制。
创新点:
提出了结合 LSTM 和 Kalman 滤波器的 LSTM-KF 模型,用于农业传感器的噪声抑制。
引入了一种新的基于 LSTM 的自适应滤波方法,通过从权重序列直接学习权重变化,调节传统滤波方案生成的权重。
开发了基于物联网的下一代水培自动化系统,结合农业传感器、执行器、无线模块和数据管理,以最大限度地提高可持续食品生产效率并降低成本。
Deep Learning Based Kalman Filter for GNSS/INS Integration: Neural Network Architecture and Feature Selection
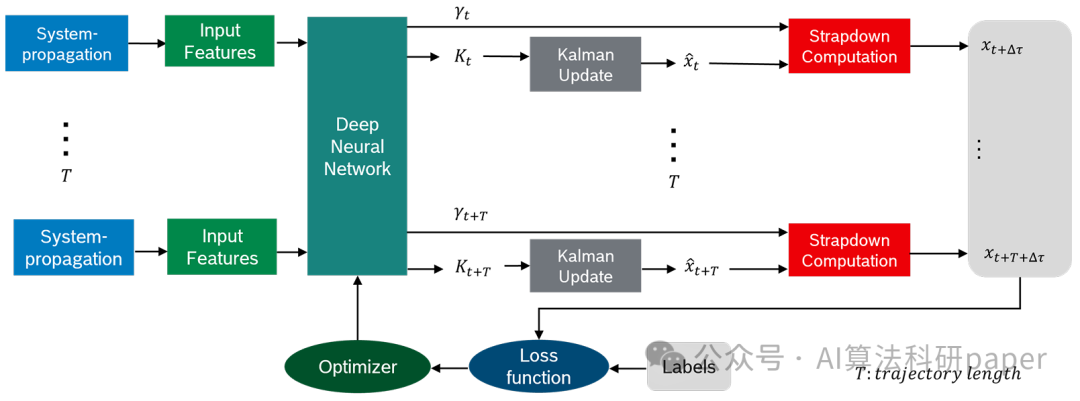
方法:论文提出了一种基于深度学习全球导航卫星系统和惯性导航系统集成算法,通过将DNN嵌入到扩展卡尔曼滤波的流程中,利用CNN提取空间信息,以及LSTM捕捉时间序列的动态特性,从而学习系统中的复杂非线性动态、测量噪声和惯性测量单元(IMU)误差。
创新点:
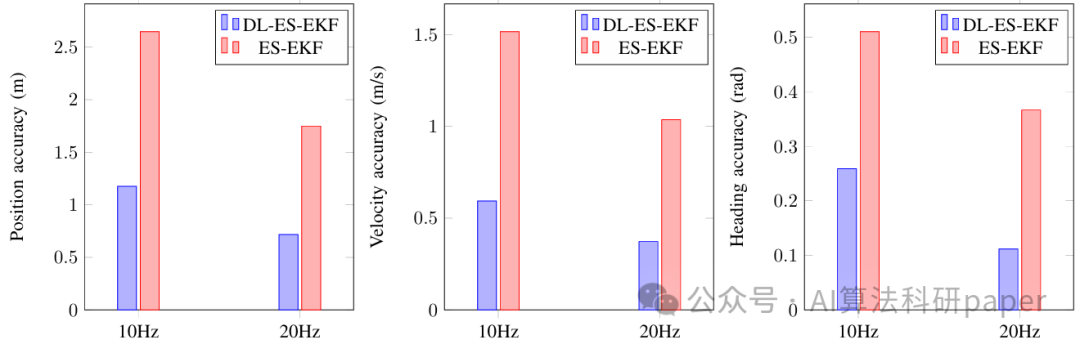
提出了一种创新性的算法,将深度学习(DL)与扩展状态卡尔曼滤波器(ES-EKF)结合起来。
为了更好地捕捉空间和时间依赖性,作者在深度神经网络的架构中引入了CNN和LSTM。
DL与ES-EKF的结合不仅提升了精度,还在计算效率上表现出色,符合实时应用的要求。
扫码添加小享,回复“长短卡尔曼”
免费获取全部论文+开源代码



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









