






现在大模型可以做很多事情,帮助写文档,写代码,生成图等,有一些可专门生成产品设计图的模型,比如字节的火山引擎或阿里云的通用万象:

但这些生成通常是图片,而有时需要生成可编辑的流程图或架构图等,下面介绍如何生成drawio格式的图。
一、使用chatgpt:
类似上面的问法,它会生成一个链接供你下载文件,注意期间它可能回答说无法直接生成draw.io格式文件,但是最后又给你生成了,说法有点自相矛盾,但最终还是生成了,打开如下:
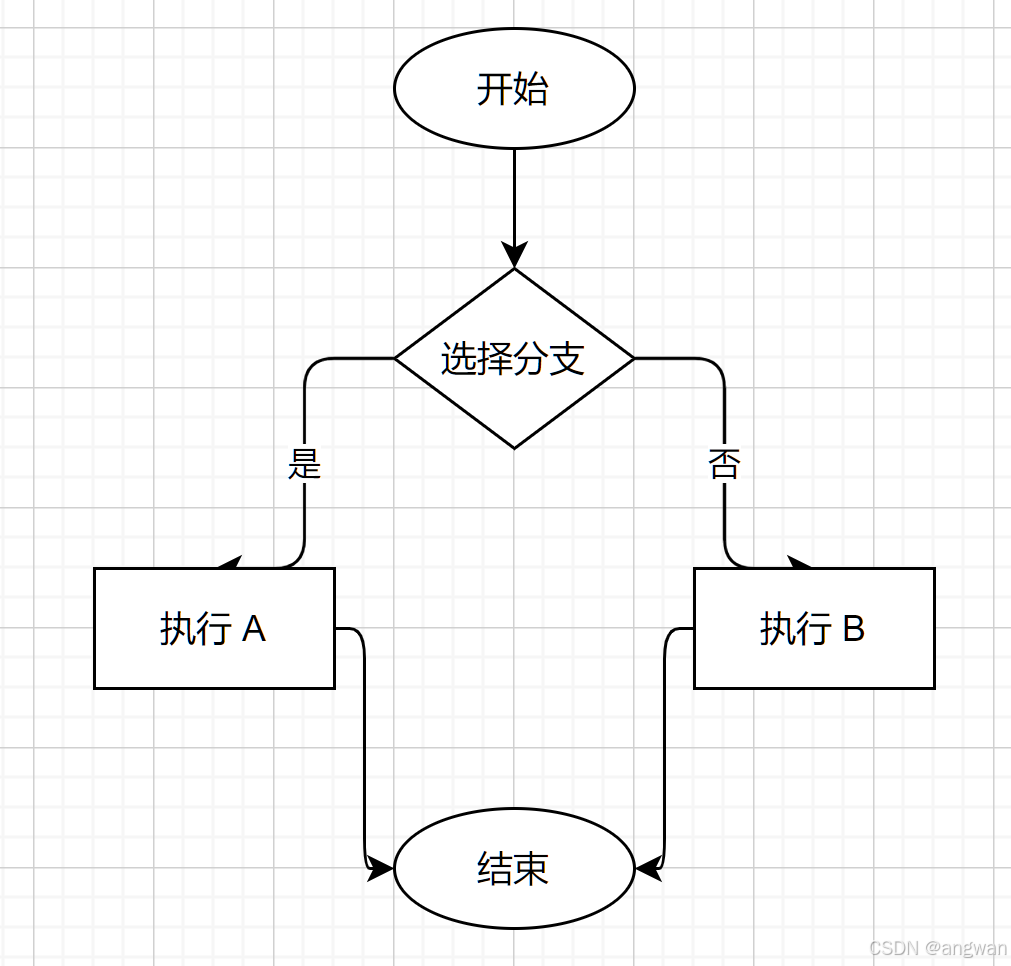
生成效果,根据你描述的提示词的准确情况。
另外之前尝试用它生成另一个图时,发现它会图颜色,但少了节点和箭头:

二、使用通用千问
通义千问,也是先声明自己不能画,让你自己绘制:
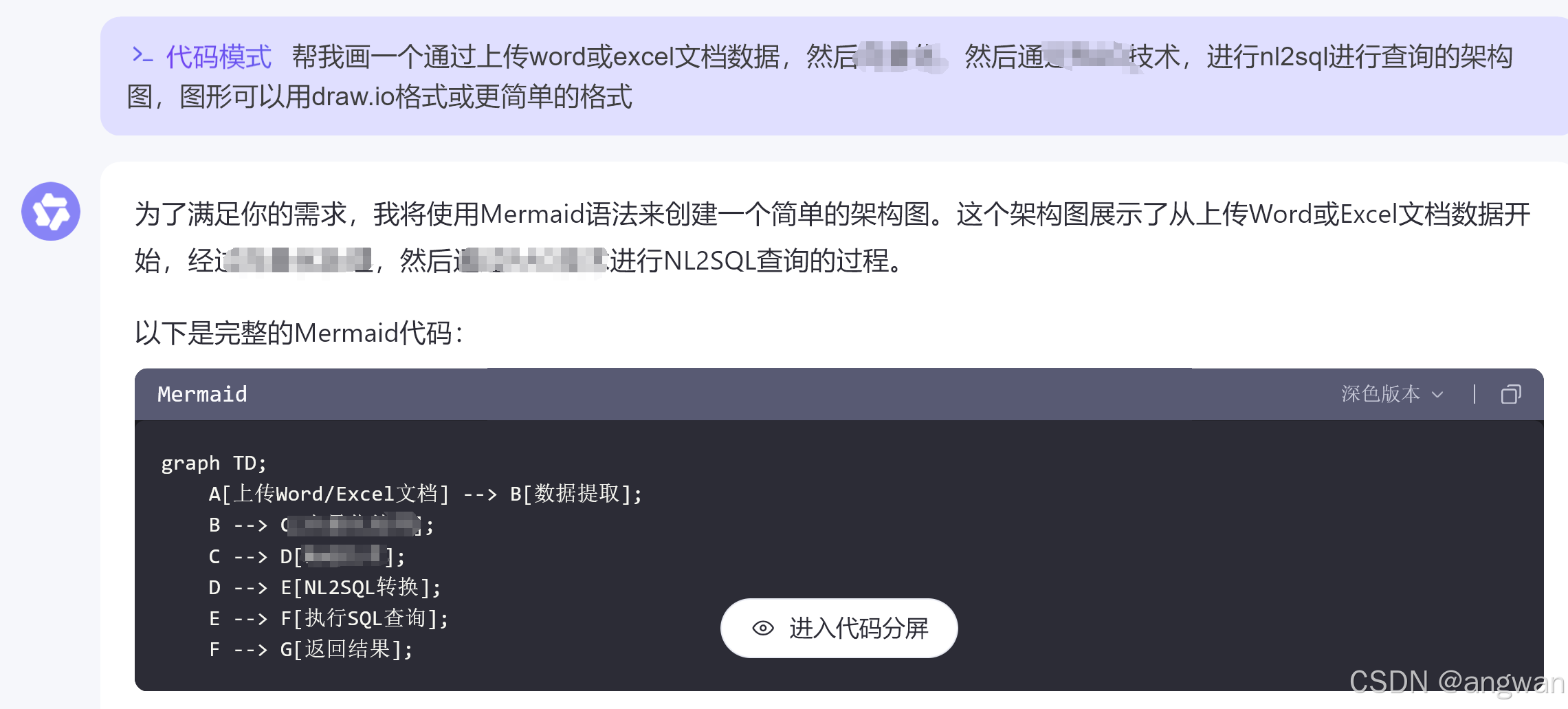
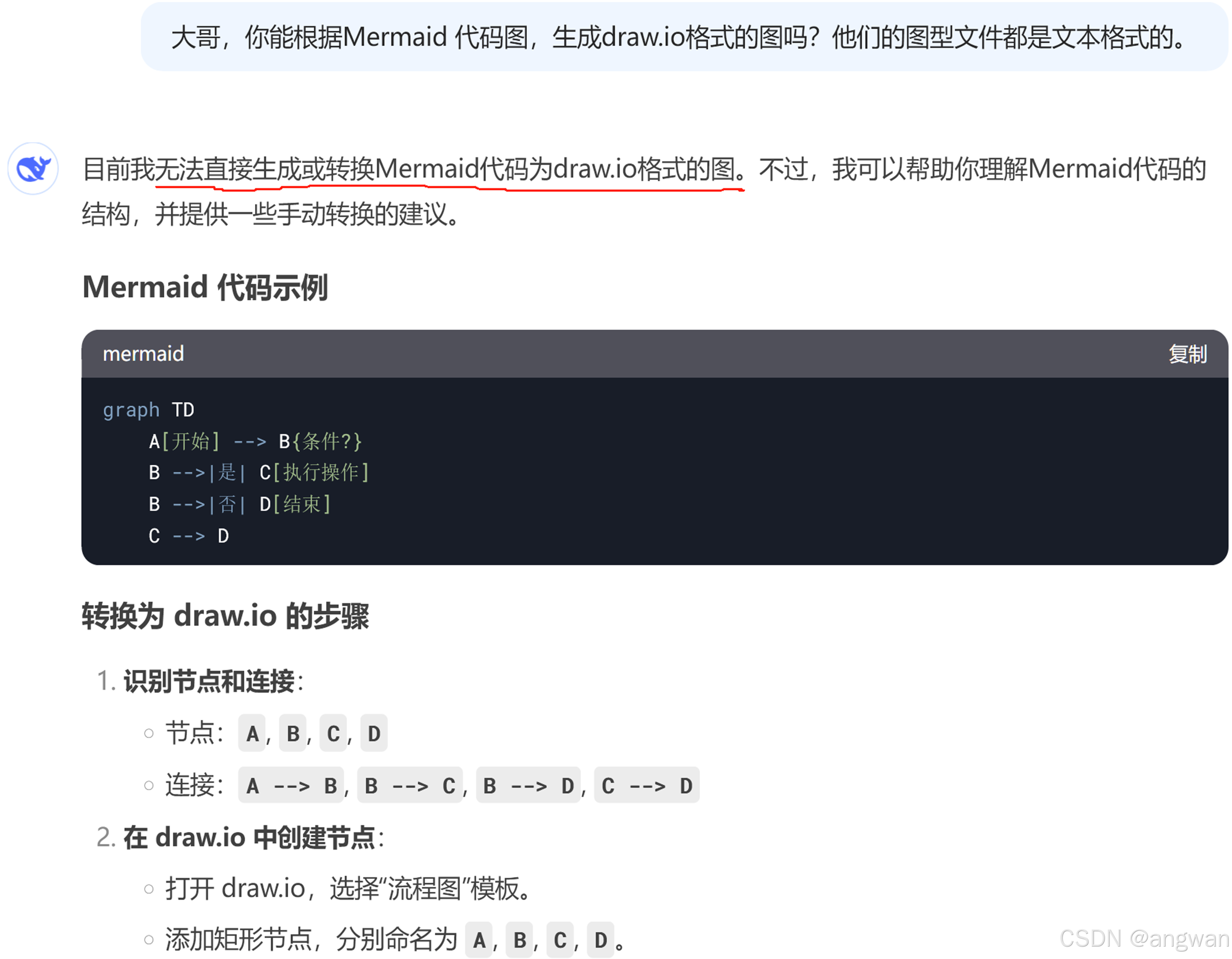
“虽然我不能直接创建一个draw.io格式的文件,但我可以生成一张图来表示你所需要的架构,并提供一个简单的解释,这样你可以基于这个图和解释在draw.io中自行绘制更详细的架构图。”,当你描述更清楚需求和要求格式时,它可以生成Mermaid的代码,可以把生成的Mermaid代码复制到在线网址:Online FlowChart & Diagrams Editor - Mermaid Live Editor 中,然后看到图形。
Mermaid可以展现简单的流程图,一般也够用,但是我们在上述网址显示的图形中,只能编辑文字,不能调整节点位置及颜色,不是很方便。因此可以基于Mermaid代码,再生成drawio格式图形。
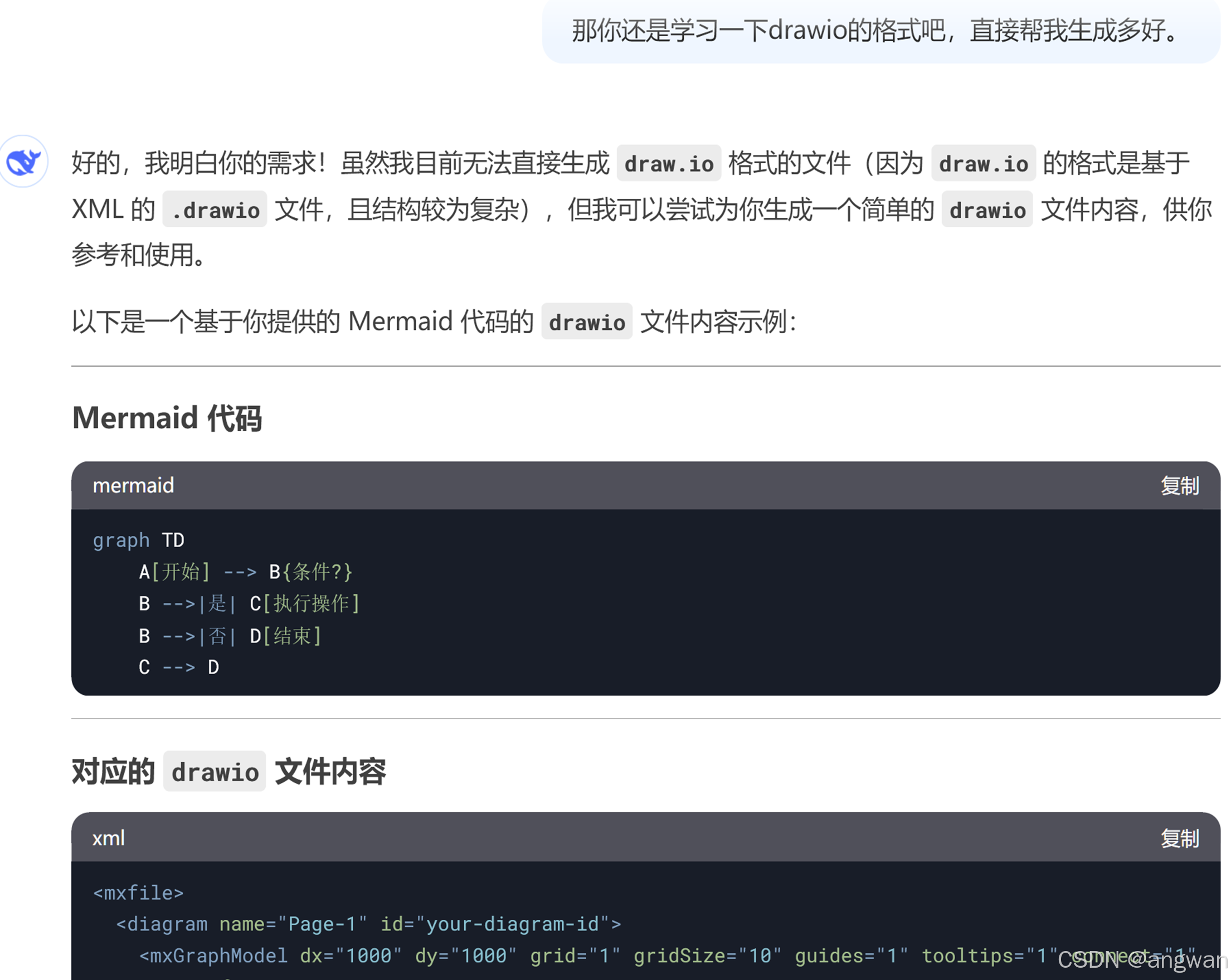
继续问通用千问:

虽然它说没有直接转换工具,但是它最终还是给出了drawio的数据:
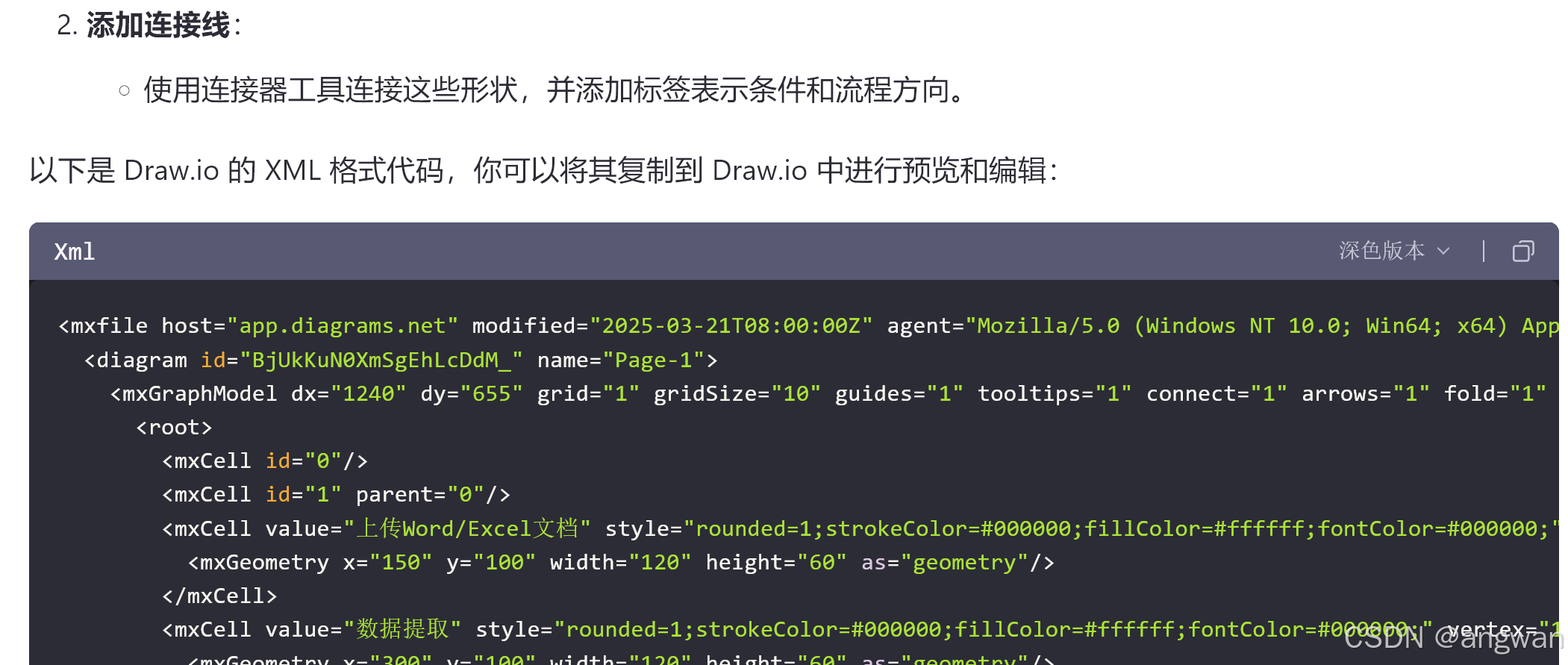
拷贝这个xml到文本文件中,并修改后缀名为.drawio ,然后用drawio工具打开:

千问生成的drawio格式图,少了箭头连续,尝试了几次让它修改,最终也没加上箭头。
三、使用deepseek
drawio还没有流行到work或excel那样通用,考虑到直接根据描述生成drawio格式目前有点困难,因此也让ds根据Mermaid格式去转换。它说它这个也不会。于是让它再试试:
看它能生成<mxfile>开头的drawio格式,于是继续鼓励:
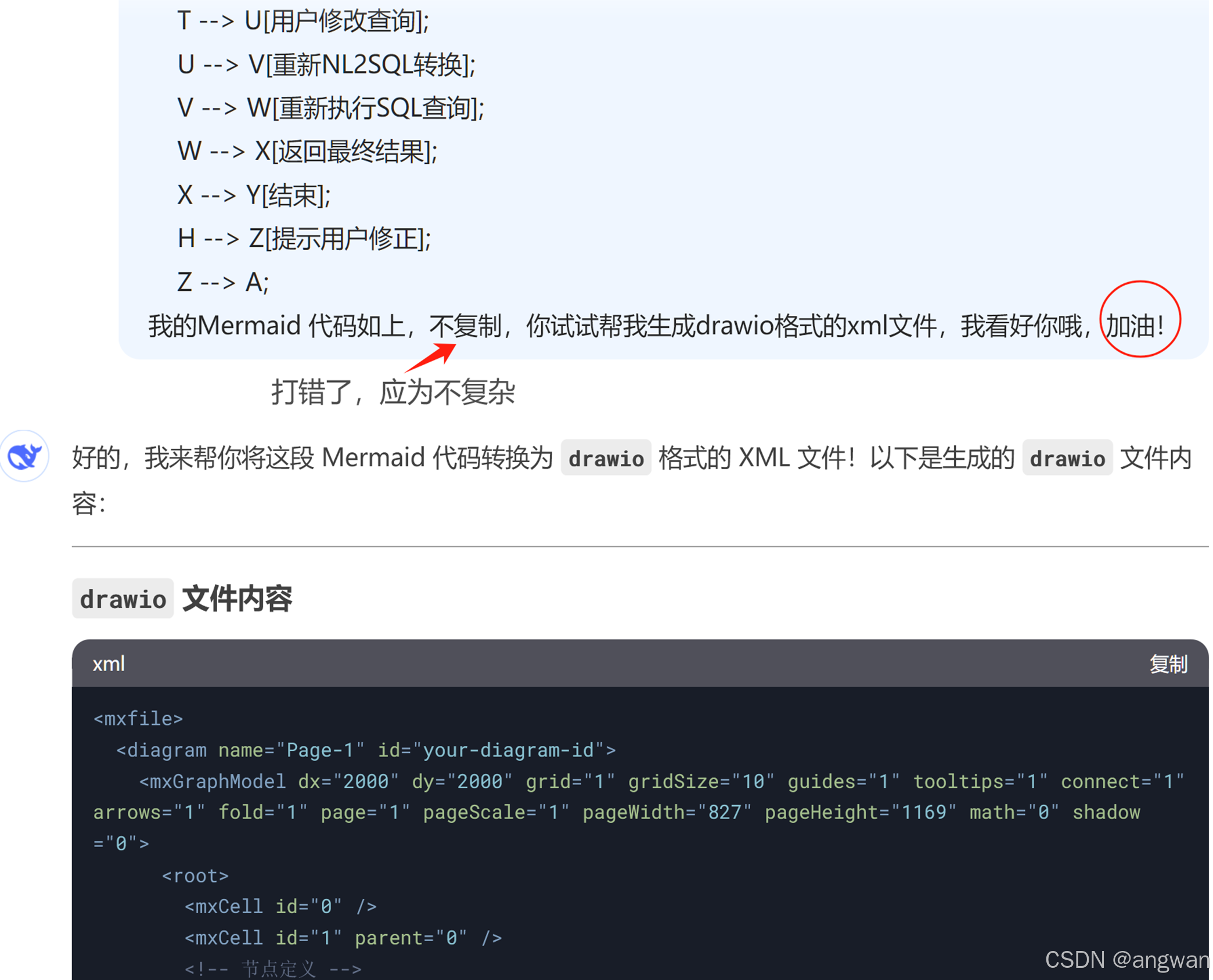
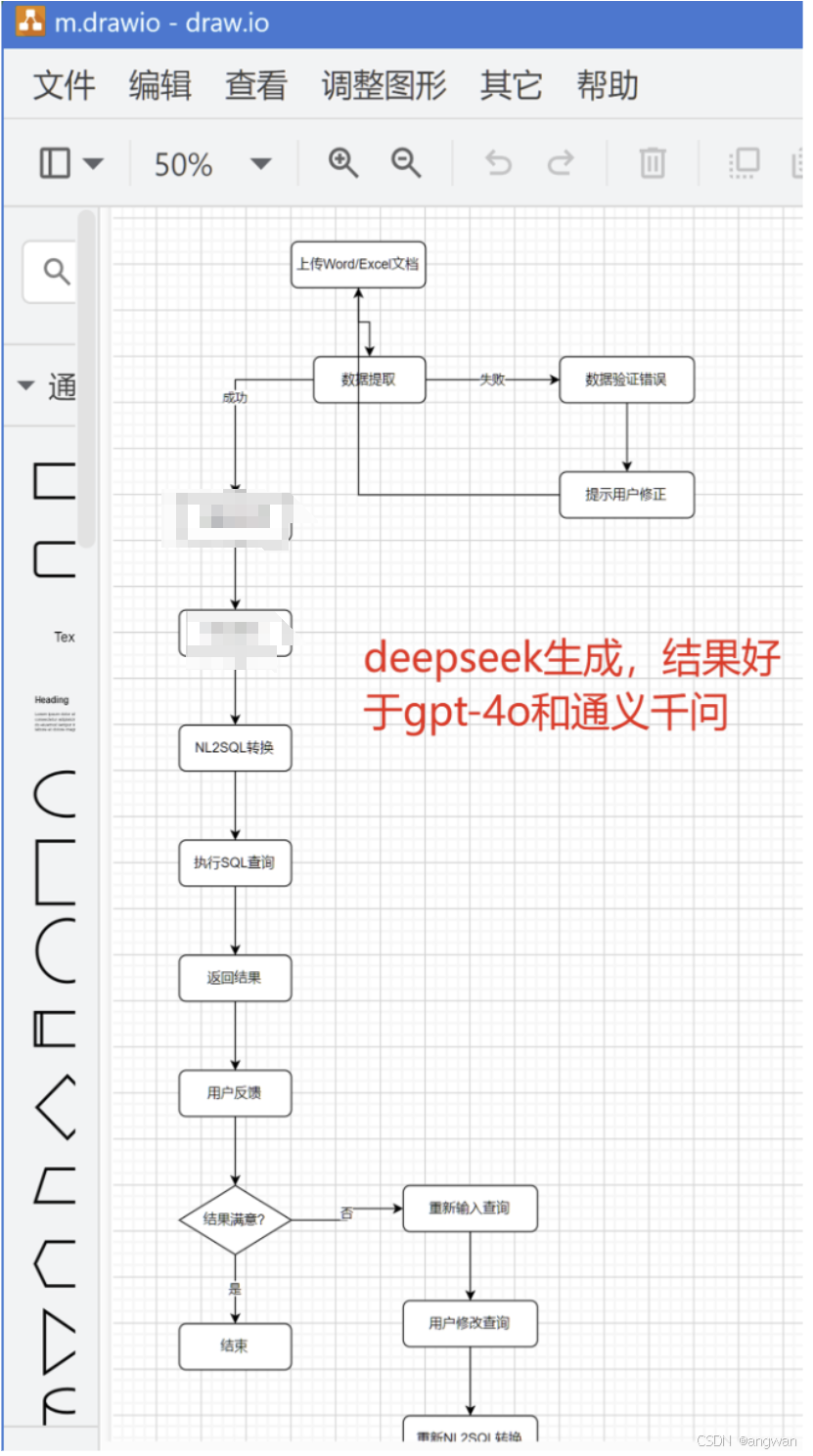
结果ds还真生成了,而且节点和箭头都有,于是拷贝文本到.drawio文件中,稍微修改就可以了。
连大模型都需要鼓励,那么对人类幼崽,更要多些鼓励啊。
AI近来日新月异,上面的需求,可能不到几周后,直接就可以输出了,上面表现也不代表哪家大模型更强,各有所长。
-----3月31日补充:
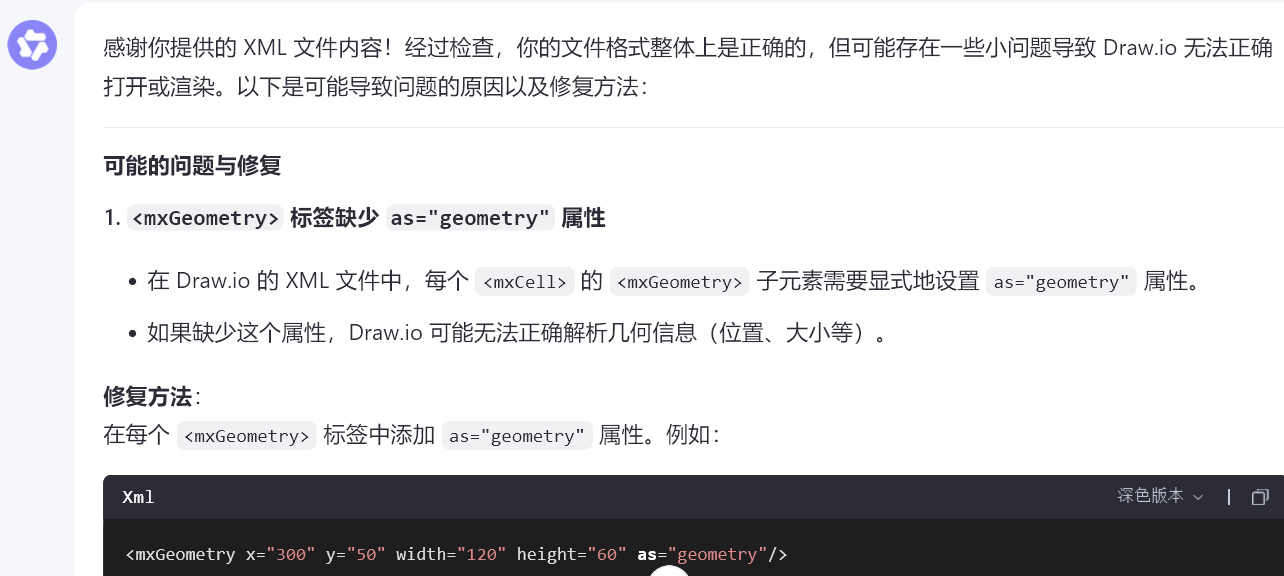
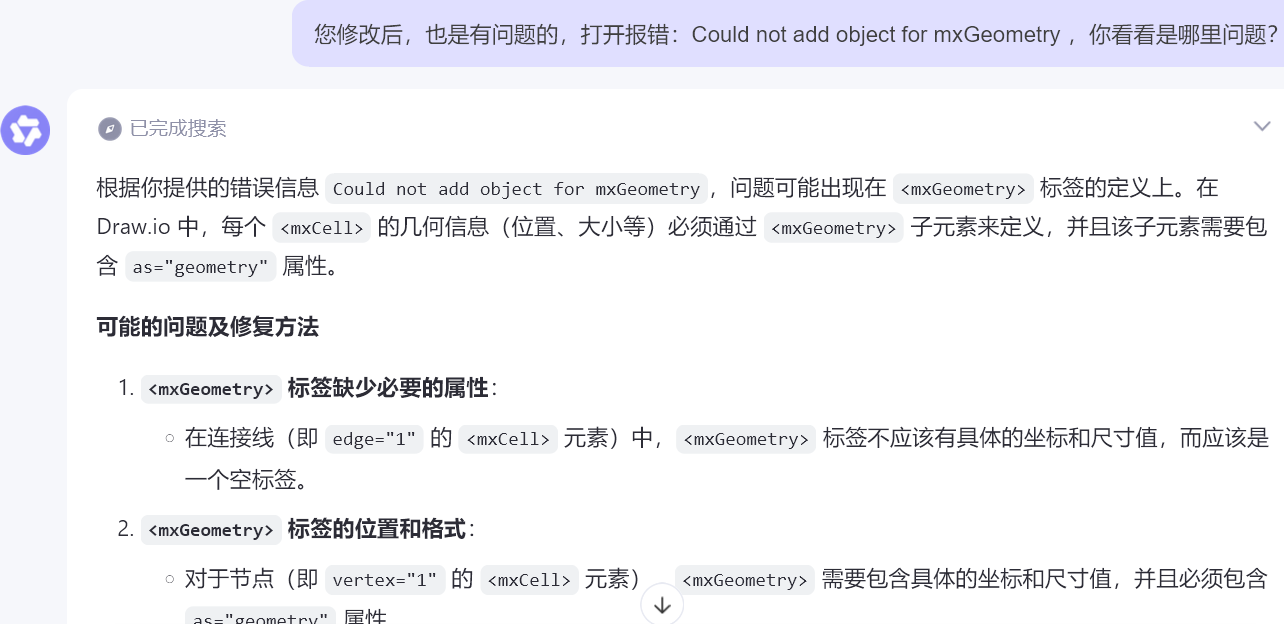
后来我生成其他图形时,用drawio打开报错:Could not add object for mxGeometry。包括gpt和ds都提示这个错误,千问生成的可以打开,但是图有点问题,因此我把ds生成的drawio格式文本拷贝给千问,并告诉他存在问题,让它帮忙检测,经常2次修正,终于可以打开了,下面是纠正要求:

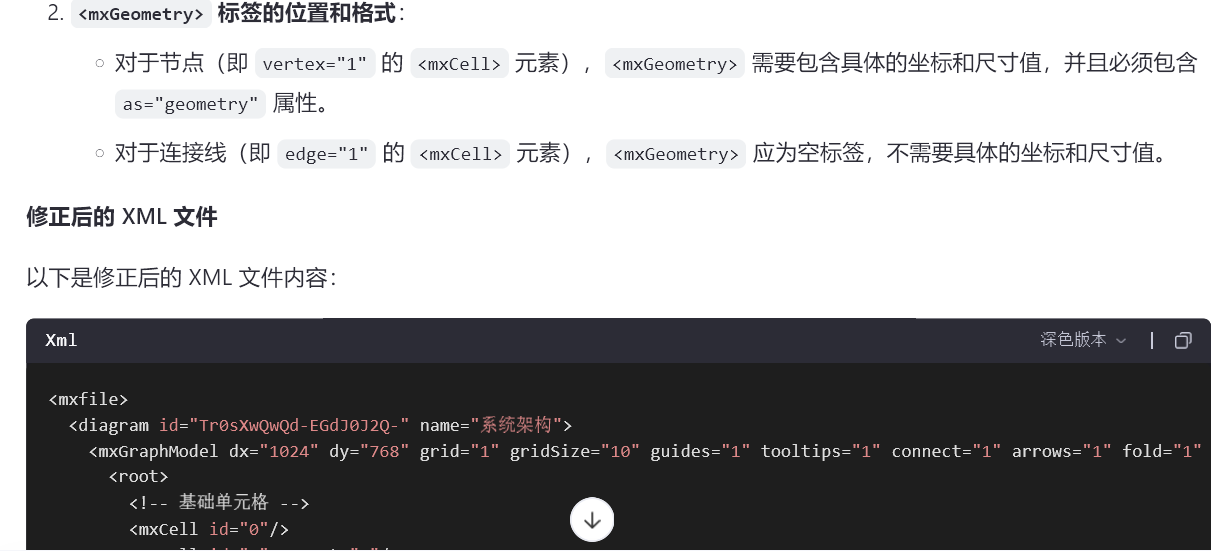
第二次反馈后回答:
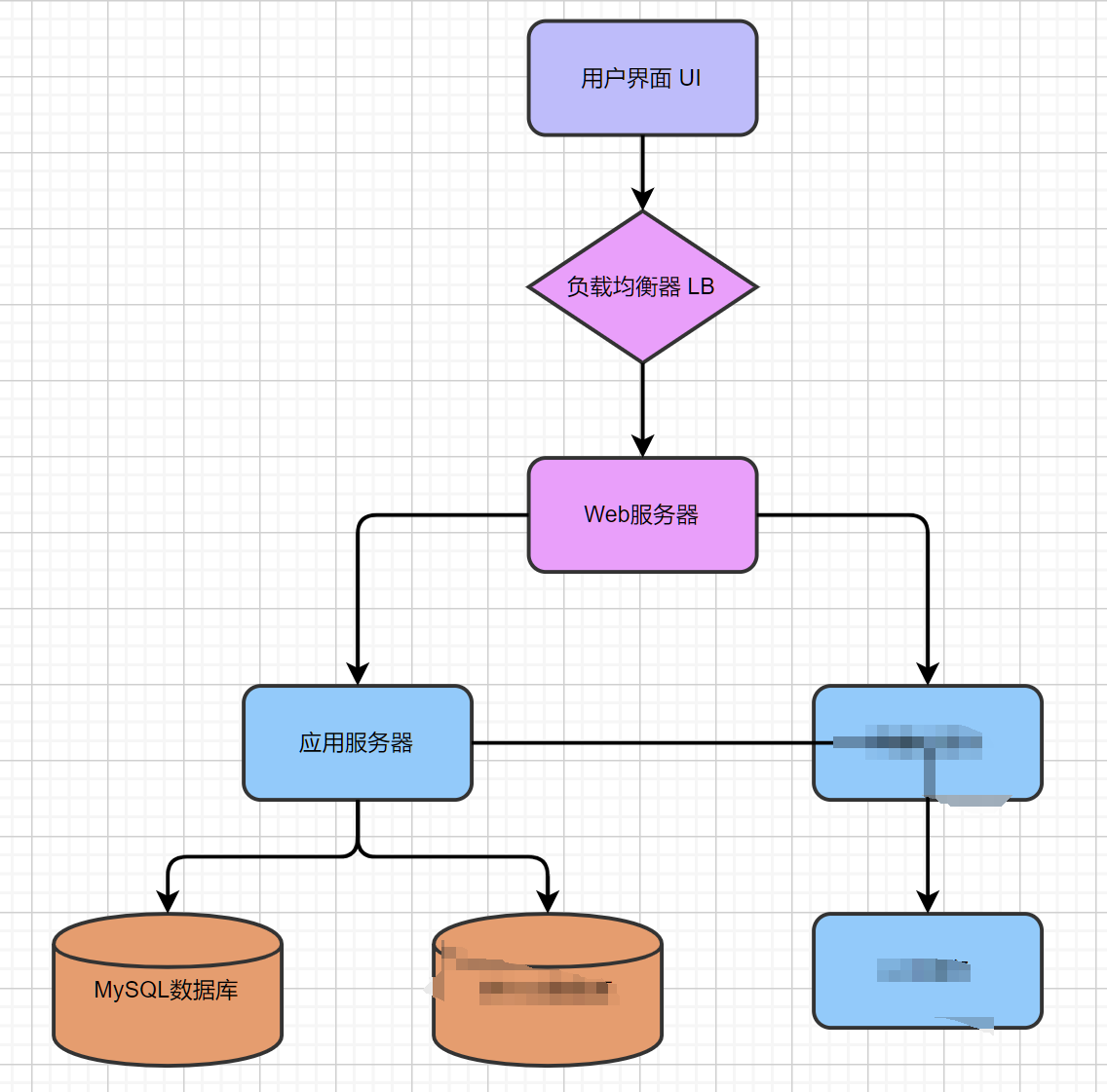
这次的可以打开了:
因此目前让大模型生成draw.io格式图不是十分稳定,可能画一个简单图花的时间比手工还慢哈。

















 405
405

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









