






1.背景
笔者曾使用过6轴陀螺仪模块mpu6050模块,发现有一个很严重的零飘问题,也查阅过网上的许多方法,比如延缓等,均解决不了问题,于是就把问题归结于是那个模块只有6轴,所以现更换成9轴陀螺仪--jy901s模块,发现仍有零飘,不过比mpu6050好多了,于是笔者又发现一款HWT101CT陀螺仪模块,这个计划以后试试。
总:mpu6050 -------- 零飘 10°左右;
jy901s -------- 零飘 2° 左右;
HWT101CT -------- 待测,不过个人感觉基本为0。
2.部分代码
(1)JY901S.c代码
#include "stm32f10x.h" // Device header
#include "JY901S.h"
#include "JY901S_Reg.h"
#define JY901S_ADDRESS 0xa0
unsigned char yawAngle[2];
int flag = 0;
void MyDMA_Transfer(int BufferSize_DMA) //单次传输模式下,重装DMA_BufferSize,需先失能DMA通道
{
DMA_Cmd(DMA1_Channel5, DISABLE);
DMA_SetCurrDataCounter(DMA1_Channel5, BufferSize_DMA);
DMA_Cmd(DMA1_Channel5, ENABLE);
while (DMA_GetFlagStatus(DMA1_FLAG_TC5) == RESET);
DMA_ClearFlag(DMA1_FLAG_TC5);
}
void JY901S_WaitEvent(I2C_TypeDef* I2Cx, uint32_t I2C_EVENT)
{
uint32_t Timeout;
Timeout = 10000;
while (I2C_CheckEvent(I2Cx, I2C_EVENT) != SUCCESS)
{
Timeout --;
if (Timeout == 0)
{
break;
}
}
}
void JY901S_WriteReg(uint8_t RegAddress, uint8_t Data)
{
I2C_GenerateSTART(I2C2, ENABLE);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);//EV5
I2C_Send7bitAddress(I2C2, JY901S_ADDRESS, I2C_Direction_Transmitter);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);//EV6
I2C_SendData(I2C2, RegAddress);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTING);//EV8
I2C_SendData(I2C2, Data);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED);//EV8_2
I2C_GenerateSTOP(I2C2, ENABLE);
}
void JY901S_ReadReg(uint8_t RegAddress)
{
int8_t length;
I2C_GenerateSTART(I2C2, ENABLE);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);//EV5
I2C_Send7bitAddress(I2C2, JY901S_ADDRESS, I2C_Direction_Transmitter);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);//EV6
I2C_SendData(I2C2, RegAddress);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED);//EV8_2
I2C_GenerateSTART(I2C2, ENABLE);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);//EV5
I2C_Send7bitAddress(I2C2, JY901S_ADDRESS, I2C_Direction_Receiver);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED);//EV6
if(flag != 0)MyDMA_Transfer(2);
for(int8_t count=0;count<length;count++){
if(count!=length-1)
{
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED);//EV_7
}
else{
I2C_AcknowledgeConfig(I2C2, DISABLE);
I2C_GenerateSTOP(I2C2, ENABLE);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED);//EV_7
}
}
flag ++;
}
void JY901S_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP ;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
I2C_InitTypeDef I2C_InitStructure;
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
I2C_InitStructure.I2C_ClockSpeed = 50000;
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStructure.I2C_OwnAddress1 = 0x00;
I2C_Init(I2C2, &I2C_InitStructure);
I2C_Cmd(I2C2, ENABLE);
DMA_InitTypeDef DMA_InitStructure;
DMA_DeInit(DMA1_Channel5);
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)&(I2C2->DR);
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)yawAngle;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;
DMA_InitStructure.DMA_BufferSize = 2; // 偏航角寄存器是2字节
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; //地址自增
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte; //DMA_PeripheralDataSize_Byte 字节int_8; DMA_PeripheralDataSize_HalfWord int_16; DMA_PeripheralDataSize_Word int_32
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal; //DMA_Mode_Normal 单次传输; DMA_Mode_Circular 循环传输;
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; //DMA_M2M_Disable 硬件触发;有时机选择 DMA_M2M_Enable 软件触发;(寄存器到寄存器) 软件触发:以最快速度搬运完
//硬件触发条件:计数不为0(DMA_BufferSize);有触发源;使能对应通道。
DMA_Init(DMA1_Channel5, &DMA_InitStructure);
// 使能DMA1通道5
DMA_Cmd(DMA1_Channel5, ENABLE);
// 启动DMA传输
I2C_DMACmd(I2C2, ENABLE);
}
(2)JY901S.h代码
#ifndef __JY901S_H
#define __JY901S_H
extern unsigned char yawAngle[2];
void MyDMA_Transfer(int BufferSize_DMA);
void JY901S_WaitEvent(I2C_TypeDef* I2Cx, uint32_t I2C_EVENT);
void JY901S_WriteReg(uint8_t RegAddress, uint8_t Data);
void JY901S_ReadReg(uint8_t RegAddress);
void JY901S_Init(void);
#endif
(3)JY901S_REG代码
#ifndef __JY901S_REG_H
#define __JY901S_REG_H
#define SAVE 0x00
#define CALSW 0x01
#define RSW 0x02
#define RRATE 0x03
#define BAUD 0x04
#define AXOFFSET 0x05
#define AYOFFSET 0x06
#define AZOFFSET 0x07
#define GXOFFSET 0x08
#define GYOFFSET 0x09
#define GZOFFSET 0x0a
#define HXOFFSET 0x0b
#define HYOFFSET 0x0c
#define HZOFFSET 0x0d
#define D0MODE 0x0e
#define D1MODE 0x0f
#define D2MODE 0x10
#define D3MODE 0x11
#define D0PWMH 0x12
#define D1PWMH 0x13
#define D2PWMH 0x14
#define D3PWMH 0x15
#define D0PWMT 0x16
#define D1PWMT 0x17
#define D2PWMT 0x18
#define D3PWMT 0x19
#define IICADDR 0x1a
#define LEDOFF 0x1b
#define GPSBAUD 0x1c
#define YYMM 0x30
#define DDHH 0x31
#define MMSS 0x32
#define MS 0x33
#define AX 0x34
#define AY 0x35
#define AZ 0x36
#define GX 0x37
#define GY 0x38
#define GZ 0x39
#define HX 0x3a
#define HY 0x3b
#define HZ 0x3c
#define Roll 0x3d
#define Pitch 0x3e
#define Yaw 0x3f
#define TEMP 0x40
#define D0Status 0x41
#define D1Status 0x42
#define D2Status 0x43
#define D3Status 0x44
#define PressureL 0x45
#define PressureH 0x46
#define HeightL 0x47
#define HeightH 0x48
#define LonL 0x49
#define LonH 0x4a
#define LatL 0x4b
#define LatH 0x4c
#define GPSHeight 0x4d
#define GPSYAW 0x4e
#define GPSVL 0x4f
#define GPSVH 0x50
#define DIO_MODE_AIN 0
#define DIO_MODE_DIN 1
#define DIO_MODE_DOH 2
#define DIO_MODE_DOL 3
#define DIO_MODE_DOPWM 4
#define DIO_MODE_GPS 5
#endif
(4)main.c代码
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "JY901S.h"
#include "JY901S_Reg.h"
float Z_Angle;
int main(void)
{
OLED_Init();
JY901S_Init();
while (1)
{
JY901S_ReadReg(Yaw);
Z_Angle = ((yawAngle[1] << 8) | yawAngle[0])*180/32768;
OLED_ShowHexNum(3, 3, yawAngle[1], 2);
OLED_ShowHexNum(3, 5, yawAngle[0], 2);
OLED_ShowSignedNum(2, 8, Z_Angle, 6);
Delay_ms(1000);
}
}
3.代码分析
(1)配置代码分析
首先,我们要配置及初始化我们的外设资源。
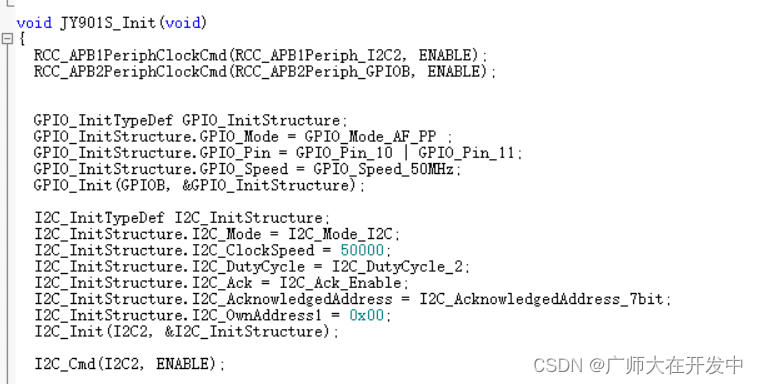
开启时钟,配置GPIO口、外设,使能,这些都是常规操作,我就不多说了。
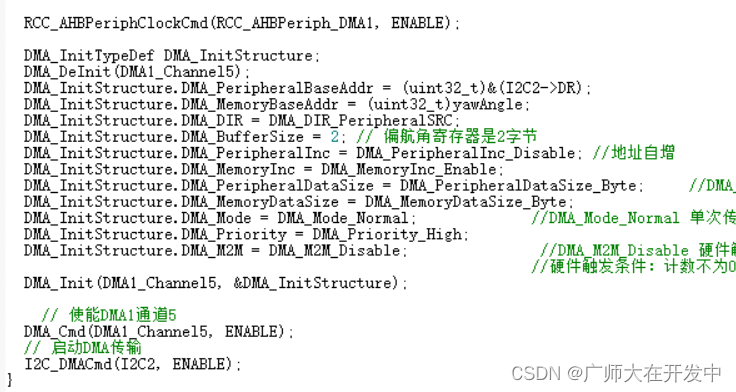
然后开启DMA时钟,说明一下,stm32f103c8t6只有DMA1,没有DMA2!
然后就配置DMA1_Channel5,注意,每种外设都只会对应唯一的DMA通道!参照下图。
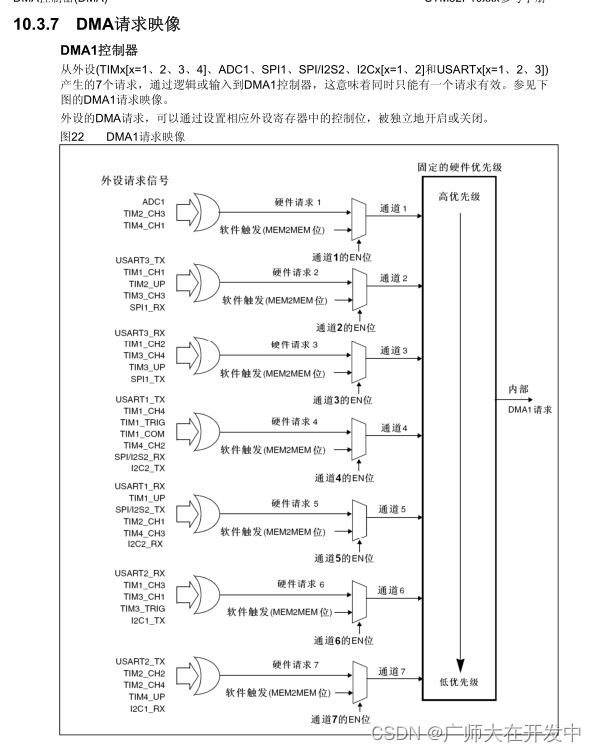
我这里使用的是I2C2_RX,故请求通道5,即DMA1_Channel5。
其他配置我都有注释,不会再评论区交流!
(2)I2C及DMA工作逻辑代码分析
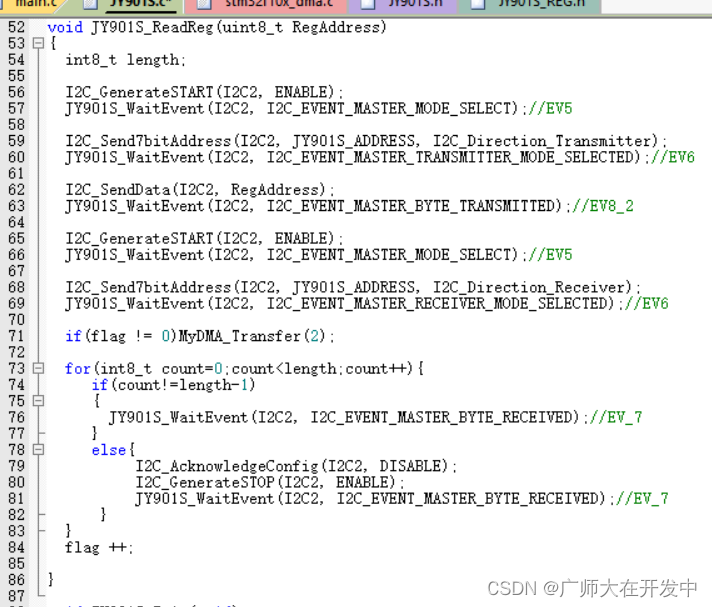
这个是读取相应寄存器封装的函数,其传参为读取寄存器的地址。
对照I2C通信协议图:
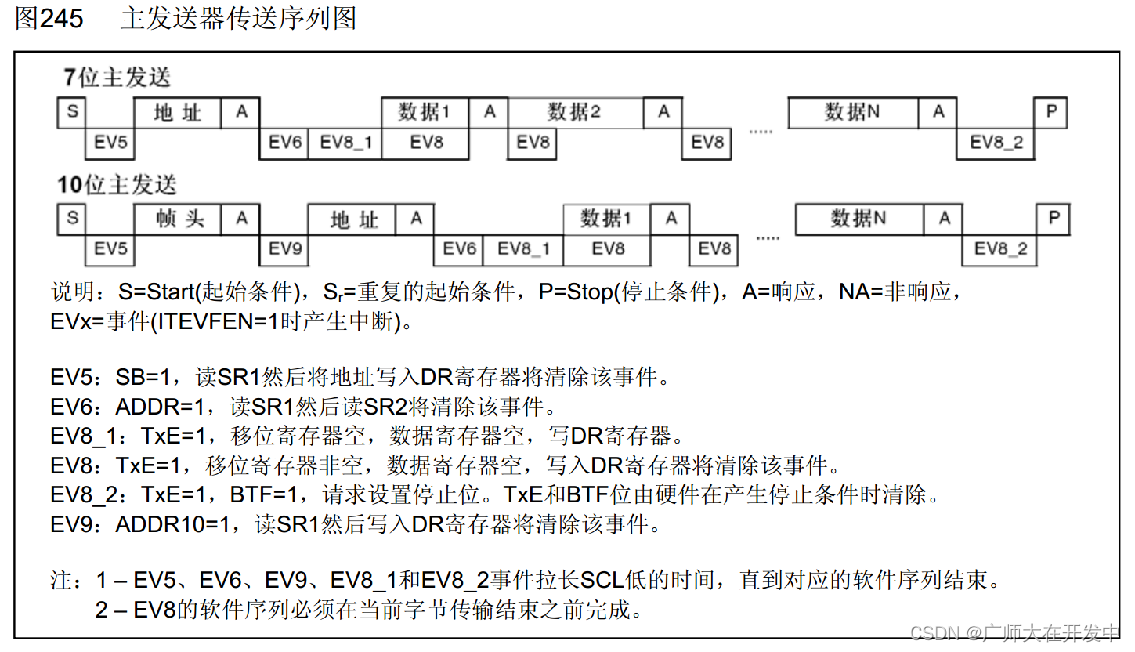
可以得出,读取从机相应寄存器的逻辑是
1. I2C_GenerateSTART(I2C2, ENABLE);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);//EV5
产生I2C起始条件,并等待EV5事件。
(说明为什么要有等待事件:读取从机寄存器的值刷回stm32的移位寄存器,再移入数据寄存器等待搬运,事件恰是移位寄存器状态的标志,标志移位寄存器上是否已经移出上一个字节的数据,我要移入下一个字节的数据,数据寄存器同理)
2. I2C_Send7bitAddress(I2C2, JY901S_ADDRESS, I2C_Direction_Transmitter);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);//EV6
向从机发送(从机地址左移一位),确认对象无误,并等待EV6事件。
I2C_Direction_Transmitter为写。
因为使用的是7位地址,而一个字节为8位,所以可以把从机地址左移一位,第八位作为确定读写位,这设计思路真的强!!!,故我把宏地址赋值为0xa0,而不是0x50。

0x50 0101 0000 0xa0 1010 0000
即0xa0 = (0x50 << 1)
3. I2C_SendData(I2C2, RegAddress);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED);//EV8_2
向从机写入读取寄存器的地址,并等待"写结束"事件EV8_2。
为什么?有什么用?
作用:把从机数据寄存器的指针指向相应得寄存器下,等一下第6步读到的数据便是这个指针指向的值。
4. I2C_GenerateSTART(I2C2, ENABLE);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);//EV5
产生重开始I2C起始条件,并等待EV5事件。
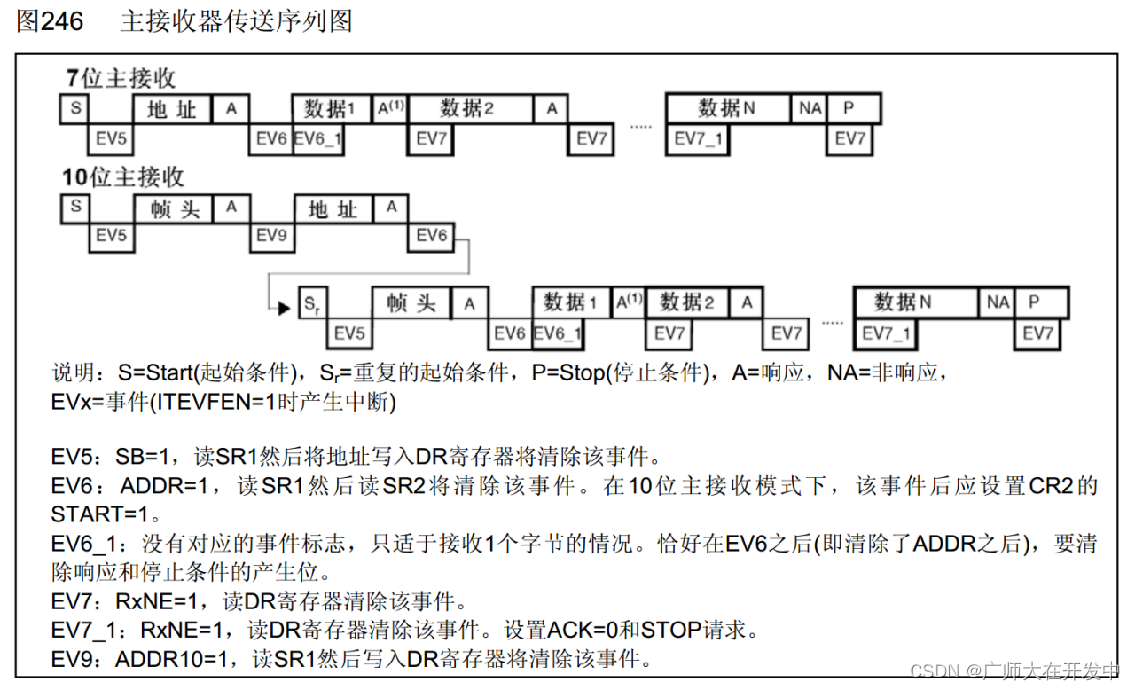
5. I2C_Send7bitAddress(I2C2, JY901S_ADDRESS, I2C_Direction_Receiver);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED);//EV6
向从机发送读指令,并等待EV6事件。
6.
void MyDMA_Transfer(int BufferSize_DMA) //单次传输模式下,重装DMA_BufferSize,需先失能DMA通道
{
DMA_Cmd(DMA1_Channel5, DISABLE);
DMA_SetCurrDataCounter(DMA1_Channel5, BufferSize_DMA);
DMA_Cmd(DMA1_Channel5, ENABLE);
while (DMA_GetFlagStatus(DMA1_FLAG_TC5) == RESET);
DMA_ClearFlag(DMA1_FLAG_TC5);
}
void MyDMA_Transfer(int BufferSize_DMA) 函数是封装重装(DMA搬运次数DMA_BufferSize)的。

即上图的 DMA_InitStructure.DMA_BufferSize = 2; // 偏航角寄存器是2字节
因为我只读取偏航角,对应寄存器为Yaw,又

每个地址下有两字节,故我需DMA搬运2次,对应DMA_PeripheralDataSize_Byte 字节int_8,一次搬运8位,即一个字节,前面初始化函数有配置。
if(flag != 0)MyDMA_Transfer(2);
for(int8_t count=0;count<length;count++){
if(count!=length-1)
{
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED);//EV_7
}
else{
I2C_AcknowledgeConfig(I2C2, DISABLE);
I2C_GenerateSTOP(I2C2, ENABLE);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED);//EV_7
}
}
flag ++;思路是开启DMA搬运后由于是单次模式,故搬运完2个字节后就停止了,而我们需要不断读取数据,所以需要重装搬运次数,flag用来记录重装了多少回,初始值为0,用if判断是不是程序刚开始时,原始有2次搬运次数,即开始时第一组数据无需重装,flag++。for循环,length我传入2,因为,只有两个字节,并第一个字节等待EV7事件,数据会刷入数据寄存器,同时DMA会搬运走,第二个字节也为最后一个字节,I2C协议规定要在等待“读结束”事件前给非应答和停止条件,故先
I2C_AcknowledgeConfig(I2C2, DISABLE);
I2C_GenerateSTOP(I2C2, ENABLE);
后
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED);//EV_7
7.在main.c中读取DMA搬运的目标寄存器的值即可。

JY901S_ReadReg(Yaw);
Z_Angle = ((yawAngle[1] << 8) | yawAngle[0])*180/32768;因为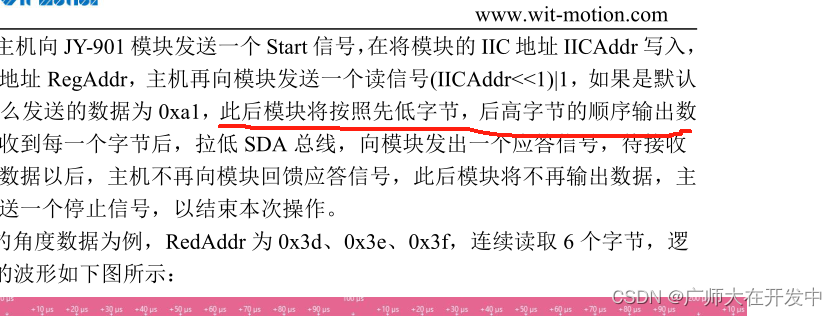
所以后读出的高位左移八位,组成一个int16数据。
4.效果演示
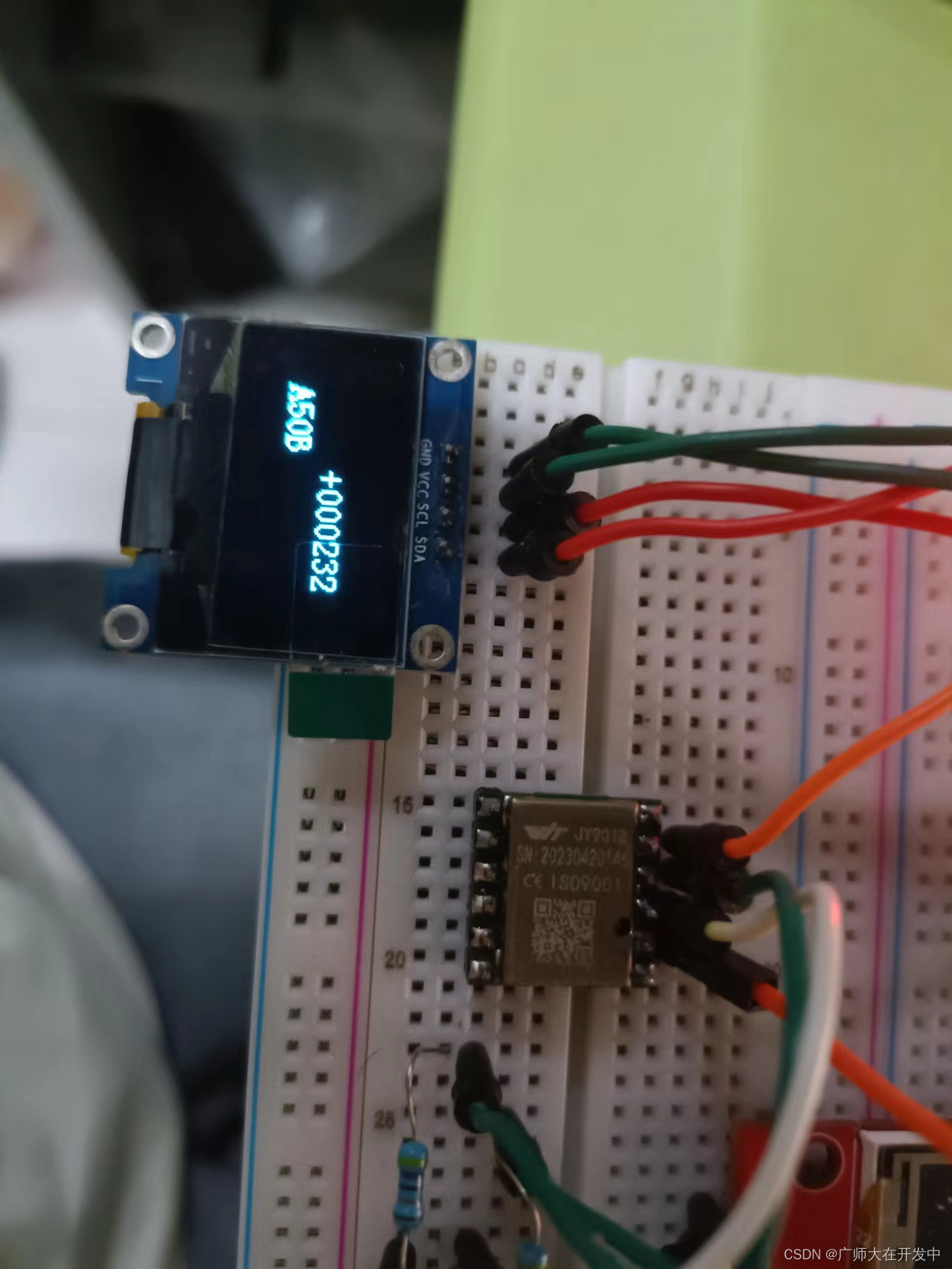
读取的16位数据为0xA50B,转10进制带入公式((yawAngle[1] << 8) | yawAngle[0])*180/32768;
计算得

符合+232,说明正确读取到数据。
谢谢观看!















 947
947











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









