






本文改编自海洋精准感知技术全国重点实验室(浙江大学)和水路交通控制全国重点实验室(武汉理工大学)合作的无人船最新综述论文《An overview of Unmanned Surface Vehicles: Methods, practices, and applications》,该论文总结了两位作者在无人船领域工作十余年的研究经验,引用和分析了近300篇相关文献归纳无人船相关方法、实践与应用工作和支撑作者的系列学术观点。无人船领域的科研工作者或工程实践人员,专家学者或初学者都可以从本论文中有所收获。论文发表于控制知名期刊《Control Engineering Practice》,该期刊专注于控制工程领域的应用研究和实践,推动理论研究成果在实际工程中的应用,涵盖自动化、机器人、能源、交通、制造等领域。根据最新的Journal Citation Reports (JCR),《Control Engineering Practice》期刊的影响因子为4.6,在自动化与控制工程领域,该期刊常年位于Q1区,具有较高的学术影响力。
文章引用:Huarong Zheng, Chenguang Liu. An overview of Unmanned Surface Vehicles: Methods, practices, and applications, Control Engineering Practice, Volume 164, 2025, 106479.
论文链接:https://doi.org/10.1016/j.conengprac.2025.106479
郑华荣,浙江大学海洋学院特聘研究员、博士生导师,主要研究方向为海洋机器人智能控制、协同组网及应用。详见个人主页https://person.zju.edu.cn/hrzheng或联系hrzheng@zju.edu.cn。
柳晨光,武汉理工大学水路交通控制全国重点实验室特设研究员、博士生导师,主要研究方向为船舶航行控制。详见个人主页http://its.whut.edu.cn/?jiaoshifengcai/842.html或联系liuchenguang@whut.edu.cn。
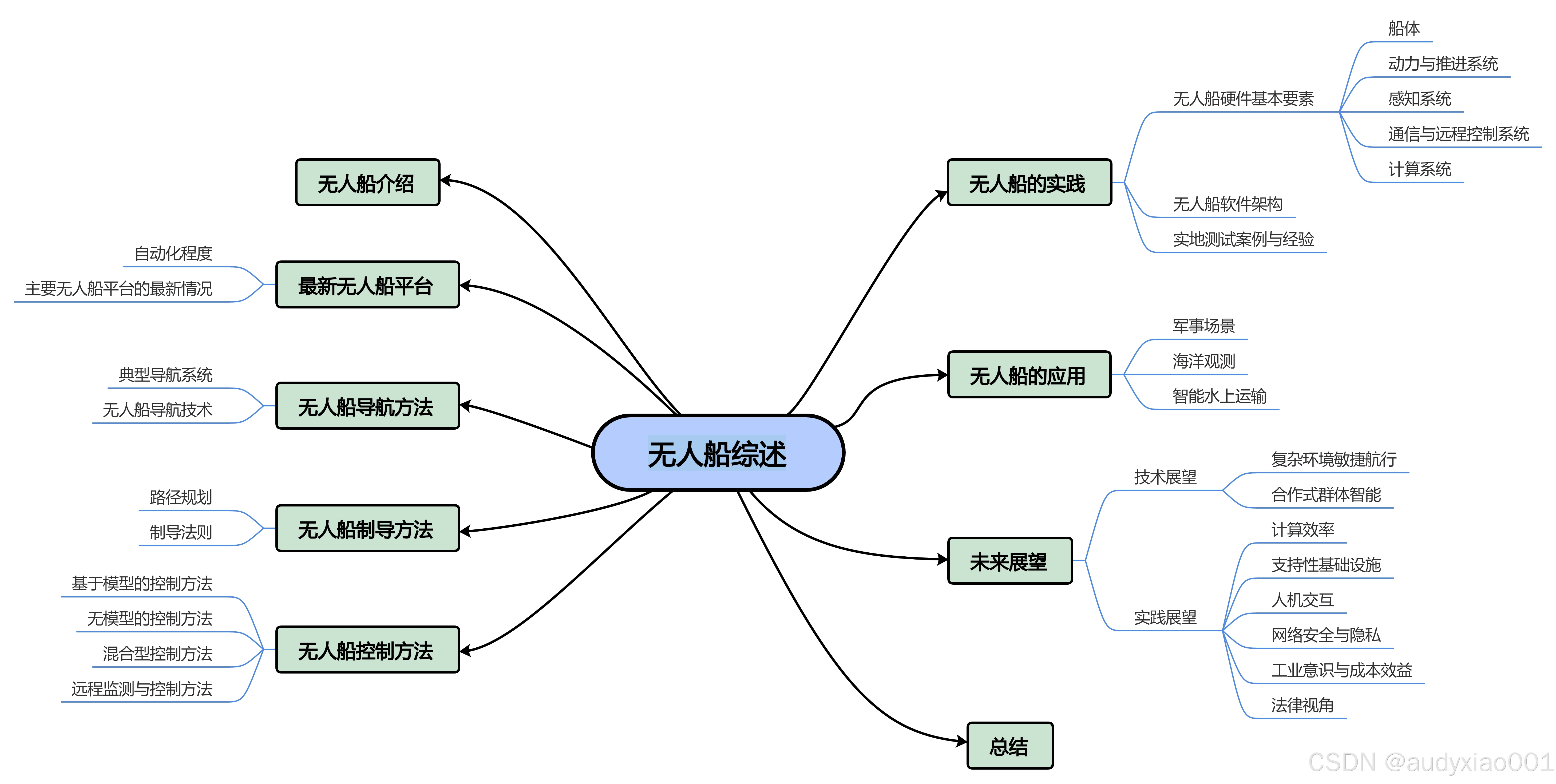
本文将重点介绍无人船的发展背景、最新平台、导航方法、指导方法、控制方法、应用实践及未来展望,方便读者对无人船进行全面了解。论文的具体组织结构如下图所示。
本推文的作者为郑华荣,审核为柳晨光。本推文由论文的原作者撰写并发布,为原创文章,所有材料具有原始版权。
在过去的几十年里,水面无人船(Unmanned Surface Vehicle,USV)以惊人的速度从概念走向现实。这一快速发展得益于技术进步以及科学、工程和军事领域新兴需求的推动。人们对无人船的关注已从纯理论研究逐步转向实际商业和工程应用。
一、无人船发展历程
无人船植根于自主移动机器人技术领域,更广泛地说属于无人系统范畴。近年来,凭借多学科机器人技术的融合,无人船在全球范围内迅速发展。作为一种无需船员操作的水面船舶,无人船既可通过远程操控运行,也可实现自主导航。其尺寸、形态和功能差异显著,从小型艇到大型船舶不一而足。
无人船的发展可以追溯到第二次世界大战,当时它们被用于远程攻击和核爆炸区的水样采集。20世纪60年代,无人船在扫雷任务中大显身手,显著降低了人员风险。进入21世纪,无人船在军事和民用领域都迎来了快速发展。在军事上,它们被用于反潜战、电子战等任务;在民用领域,无人船在环境监测、海上巡逻、科学研究等方面发挥着重要作用。与传统的有人驾驶船只相比,无人船在安全性、舒适性、灵活性和效率方面具有优势。无人船也被视为有望彻底改变海运业的关键创新。目前,许多国家和组织都在这一领域争夺领先地位,欧洲、亚洲国家以及美国表现尤为活跃。挪威的Maritime Robotics公司已获准开辟全球首条无人驾驶货船货运航线,中国公司云洲成功展示了由56艘无人水面艇组成的海上编队,荷兰研究人员在《Nature》杂志上评论称无人船的时代已到来,这些事件都发生在近期。
过去十年间,已开发出多个战略级项目、非营利联盟和针对无人船的政策路线图,详情见表1。欧洲和亚洲国家主要将无人船用于民用领域,比如自主航运。与此同时,美国通过各种军事项目在技术开发方面处于领先地位,但在自主航运方面却落后于欧洲国家。著名的无人船竞赛包括海洋机器人X挑战赛、世界机器人帆船锦标赛、微横渡挑战赛、壳牌海洋发现X大奖赛、罗博纳顿竞赛、罗博船竞赛、海军先进海军技术演习、尼约德国际学生挑战赛、珠海万山国际智能船艇公开赛、全国海洋航行器设计与制作大赛以及美国国防高级研究计划局竞赛等。
表1 过去十年中与无人船相关的重要战略活动(参考文献详见论文)。
|
Region |
Year |
Activities |
Brief introduction |
|
EU |
2017 |
H2020 project: NOVIMAR |
Waterborne transport system for cargo transferring with vessel trains |
|
2019 |
H2020 project: AUTOSHIP、 |
Speeding-up the transition towards a next generation of autonomous ships focusing on goods mobility | |
|
2020 |
H2020 project: MOSES |
Sustainable short sea shipping with automated containerships and supply chain optimization | |
|
2020 |
H2020 project: AEGIS |
Waterborne cargo logistics system with autonomous ships and automated ports | |
|
2020 |
H2020 Project: AUTOBarge |
First-ever training program for the application of unmanned or autonomous vessels for smart inland shipping | |
|
2023 |
EU project: SEAMLESS |
Fully automated, economically viable, cost-effective, and resilient waterborne freight feeder service | |
|
2024 |
EU project: AUTOFLEX |
Develop a novel type of autonomous inland cargo vessel | |
|
US |
2020-Phase 1 2022-Phase 2 |
DARPA project: NOMARS |
Ship design without crew and supports distributed maritime operations |
|
2020 |
DARPA project: Sea Train |
Enhancing ranging with connected vessels | |
|
2021 |
Navy project: Unmanned Campaign Framework |
Roadmap to scale tested and proven unmanned systems to fleet | |
|
Norway |
2022 |
National project: SAFEMATE |
Evaluate the efficiency and safety of autonomous navigation systems |
|
Netherlands |
2021 |
Alliance: SMASH! |
Netherlands forum for smart shipping |
|
Denmark |
2019 |
Institute: ShippingLab |
Create Denmark’s first autonomous, environmental friendly ship |
|
Finland |
2016 |
Alliance: One Sea |
Global alliance for an automated and autonomous maritime transport system |
|
Japan |
2020 |
Institute: MEGURI 2040 |
Implement fully autonomous navigation |
|
South Korea |
2020 |
National project: KASS |
Korea Autonomous Surface Ship Project |
|
2019 |
Roadmap: Maritime 2050: Navigating the Future |
Autonomous navigation innovation hub by 2025 | |
|
2025 |
Collaboration: ZeroUSV |
Design, build and operate a fleet of autonomous USVs engineered for over-the-horizon missions | |
|
Singapore |
2019 |
Institute: Maritime Innovation Lab (MIL) |
Support new port services and intelligent ship operations |
|
China |
2023 |
New Generation of Waterborne Transportation |
Improve the current waterborne cargo transportation with intelligent ships |
基于过去几十年方法论的进步,无人船的研究与开发重点正逐渐转向实际验证和面向应用的能力。无人船的实际验证需要认真考虑各子系统之间动力和数据流的交互,整合机械设计、软件开发、电路模块、有效载荷选择以及无人船与岸基通信等。复杂的海洋环境给无人船系统的可靠性以及验证测试程序带来了独特的挑战。相反,能够在不确定和非结构化的海洋环境中自主运行且无需人工干预的能力,在各种应用中具有重要价值。在特定的工程、科学和军事领域中,应用型能力的发展仍需进一步加强。毫无疑问,无人船未来的发展将取决于方法、实践和应用能力的共同进步,迫切需要对这些方面无人船研究的最新进展进行一次全面的调研和总结。
二、无人船最新平台
十年前,无人船的大部分工作主要集中在纯粹的研究目的上。在实验室环境中构建和测试小型平台。然而,随着方法和技术的成熟,我们现在目睹了无人船的发展,其从小规模实验平台向完全实现的智能船舶进行转变,从纯粹的实验室研究转向现场测试和实际应用。
从21世纪初,麻省理工学院设计了一系列无人船,如ARTEMIS、ACES等,意大利日内瓦大学开发了ALANIS和Charlie平台。在过去的十年里,这些实验室原型已迅速发展为成熟的商业或非商业产品,表2提供了过去十年开发的主要无人船平台和产品的更新。
表2 近十年来代表性无人船平台(参考文献详见论文)。
|
Country |
Year |
Organization |
Platform |
Application |
|
Norway |
2023 |
Maritime Robotics |
Mariner |
Uncrewed freight transport at sea |
|
2022 |
NTNU |
MilliAmpere 2 |
Urban autonomous passenger ferry; Predecessor milliAmpere in 2017 | |
|
2021 |
Yara & Kongsberg |
Yara Birkeland |
World’s first fully electric and autonomous container ship with zero emissions | |
|
2014 |
DNV & NTNU |
ReVolt |
Test the next generation unmanned shipping concept | |
|
Finland |
2018 |
Finferries & Rolls-Royce |
Falco |
World’s first fully autonomous ferry |
|
US |
2020 |
MIT |
Roboat II |
Transport over urban waterways |
|
2018 |
SailDrone |
SailDrone USV |
Wind-propelled long-range ocean data collection | |
|
2016 |
DARPA |
Sea Hunter |
Anti-submarine warfare | |
|
China |
2018 |
Huazhong University of Science and Technology |
HUSTER USVs |
For survey, patrol, surveillance and law enforcement missions |
|
2017 |
Shanghai University |
Jinghai USVs |
Hydrographic survey and mapping in shallow waters | |
|
2013 |
Yunzhou Intelligence Tech. |
Yunzhou USVs |
Oceanographic survey and sea floor mapping | |
|
Netherlands |
2019 |
Delft University of Technology |
Grey Seabax |
Small scaled offshore support vessel |
|
Japan |
2022 |
Imoto Corporation |
Mikage |
Autonomous container transport |
|
South Korea |
2022 |
Hyundai |
Prism Courage |
Large size LNG transport ship |
|
Croatia |
2017 |
H2O Robotics |
H2Omni-X |
Dynamic positioning and diver following |
|
UK |
2019 |
AutoNaut |
AutoNaut USV |
Wave propelled uncrewed surface vessels for long-range ocean observation |
|
2017 |
SEA-KIT |
SEA-KIT USV |
Autonomous survey or defense vessel with adaptive payload area | |
|
Singapore |
2020 |
Wärtsilä & PSA Marine |
PSA Polaris |
Autonomous harbor tugboat |
尽管上述提到的无人船平台在尺寸、设计和应用方面各不相同,但它们与传统船舶最显著的区别在于其智能化。通常,这种智能化是通过环境感知、处理收集到的数据以及确定完成指定任务的适当行动来实现的。对于无人船而言,这些过程主要由制导、导航与控制(Guidance, Navigation and Control,GNC)模块和算法来完成。图1简要展示了GNC系统所涉及的技术组件。GNC模块主要利用估计、优化和控制方面的理论工具,以及新兴的学习驱动技术。
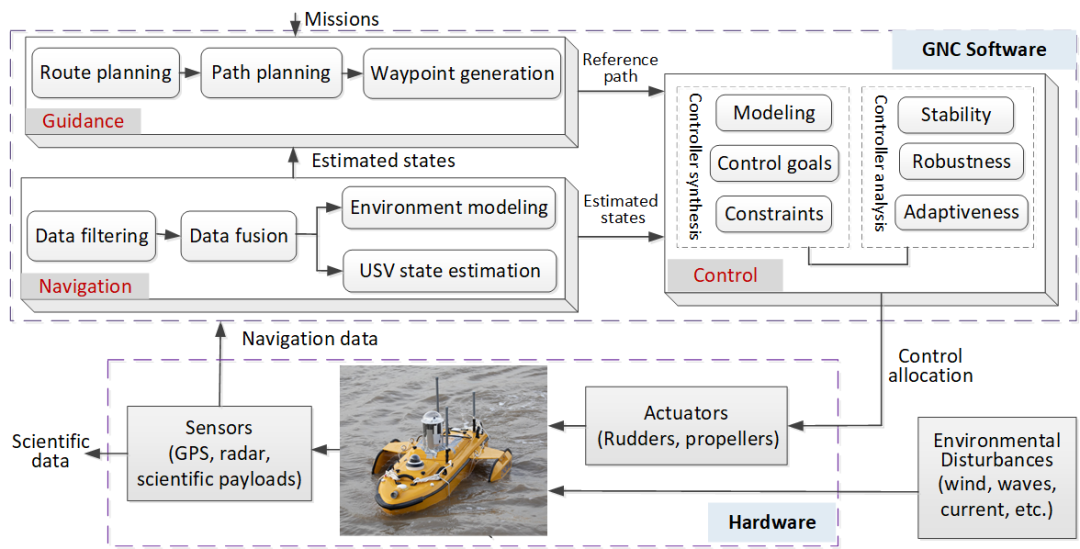
图1 无人船导航控制系统。导航模块利用船载导航传感器来估算无人船及其所处环境的状态。制导模块根据任务目标确定所需的路径或轨迹。控制模块计算对执行器的较低层级指令,以跟踪或执行制导模块发出的参考指令。
三、无人船导航方法
导航是指确保船舶安全运行的决策过程,包括遵守法规,管理紧急情况以及在复杂环境中的机动。导航系统使无人船能够收集位置、速度、水深、环境数据和其他海洋特定测量等信息。无人船依靠船上导航传感器以及环境感知、建模和状态估计算法来完成这项任务。
无人船导航系统由不同的传感器和设备组成,用于数据采集、通信、交互等功能。如图2所示,无人船导航系统可分为三层,即设备层、功能层和应用层。在设备层中,有自己的船舶感知设备、惯性测量单元、环境感知设备、激光雷达、相机等等;在功能层中,使用相关技术和方法分析来自设备层的数据和信息,以获取准确的自身船舶状态和环境信息;在应用层中,无人船导航场景在功能层信息的基础上重建。
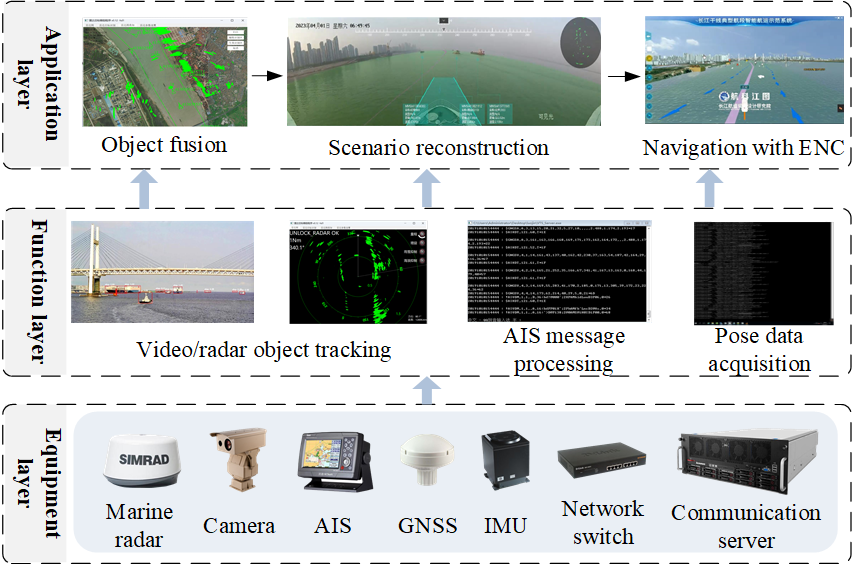
图2 分层式的无人水面航行系统由三个层次组成:应用层、功能层和设备层。
论文中总结了目前无人船的导航方法将其分为两大类,一类是靠卫星和惯导的传统方法,另一类是用各种环境传感器的新方法,并介绍了其优缺点。
传统方法通过卫星定位配合惯性测量能提供非常精准的位置、方向和速度信息。不过在海上会遇到问题——卫星信号有时较弱,比如遇到恶劣天气或者远洋航行时,不仅导航会出问题,维护成本还特别高。当卫星信号较弱时,无人船可以靠航位推算来勉强维持,但时间一长误差就会越来越大。这时候就需要使用各种环境传感器来辅助导航。比如,摄像头经济成本低,可在晴朗天气下识别物体的形状和颜色,也可以通过双摄像头判断距离,雷达和激光雷达可以绘制精细的立体地图,受天气干扰影响小。为提高导航可靠性,无人船通常采用多传感器数据融合,现有方法包括单向融合与多项融合,单项融合是将点云投影到图像平面进行融合,但可能损失原始数据结构。双向融合可以保留不同传感器的原始数据特征,适用于多任务场景。
此外,在海上稀疏目标跟踪任务中,不同传感器的数据可能存在时空偏差。常用的多目标跟踪算法包括:K近邻算法,联合卡尔曼滤波算法和联合概率数据关联算法。在高密度交通海域,目标跟踪面临数据重叠和轨迹交叉等挑战,可采用多假设跟踪或随机有限集理论等方法。近年来,人工智能技术(如深度学习)在无人艇态势感知中的应用也日益广泛。
四、无人船制导方法
制导是指引导无人船沿预定路径到达目标航点的过程,主要包括两个关键步骤:(1) 路径规划—在导航地图上生成可行路径;(2) 路径跟踪—控制无人船沿规划路径航行。
路径规划可以分为经典方法和智能方法两大类,经典方法根据环境信息的已知程度,可以分为全局路径规划和局部路径规划。全局路径规划基于静态环境,生成从起点到终点的最优路径,典型算法有Dijkstra、A-star、快速探索随机树算法等;局部路径规划基于动态环境,完成实时避障,适应环境变化,典型算法有人工势场法、动态窗口法、向量场直方图等。近年来,基于进化算法和强化学习的智能方法成为研究热点,通过进化算法模拟生物进化或群体智能,适用于复杂环境,通过强化学习强化与环境交互学习最优策略,在未知动态环境中表现优异。
路径规划完成后,通过制导算法控制无人船沿路径行驶,常用方法有纯追踪,视线制导与恒定方位制导等。其中,纯追踪是通过调整无人船航向,使其朝向路径上的“前视点”,适合曲线路径跟踪,实现简单,但是需精细调参以避免超调;视线制导基于无人船、参考点和目标点的几何关系计算期望航向,但直接应用于曲线路径时需要额外优化;恒定方位通过调整无人船与虚拟目标的相对速度向量保持航向,适用于动态目标跟踪,但同样存在超调风险。
目前,无人船的不同路径规划方法概述总结如表3所示:
表3 无人船不同路径规划方法概述(参考文献详见论文)。
|
Methods |
Types |
Algorithms |
Main features |
|
Classical methods |
Global |
Dijkstra |
(1) Prior known environment; (2) static environment; (3) off-line; (4) time-consuming. |
|
A* RRT | |||
|
Local |
Potential field Vector field |
(1) Dynamic obstacle avoidance; (2) real-time; (3) local minima. | |
|
Velocity space | |||
|
Optimal path planning | |||
|
Hybrid |
Combinations of multiple algorithms |
(1) Hierarchical path planing and improvement; (2) complexity. | |
|
Intelligent methods |
Evolution algorithms |
GA |
(1) Biological behavior inspired; (2) complete but not optimal. |
|
PSO | |||
|
ACO | |||
|
RL |
Q-learning |
(1) Environment-interaction; (2) complex and dynamic scenarios; (3) black-box mode; (4) time-consuming model training. | |
|
deep RL |
五、无人船控制方法
无人船的控制系统是一个闭环反馈系统,通过算法计算控制指令,使无人船实现期望的运动行为。控制系统接收导航模块的状态估计和制导模块的参考指令,结合无人船动力学模型,生成控制输入。无人船的控制任务可分为三类:定点控制:保持固定位置或航向、路径跟踪:沿几何路径行驶,无时间约束和轨迹跟踪:严格按时间-空间参考轨迹运动。无人船的控制方法可以概括为如下三种:
(1)基于模型的控制方法
基于无人船的动力学模型(通常为三自由度质量-阻尼-科里奥利模型)设计控制器,适用于已知或部分已知系统。理论严谨,但依赖精确模型,实时性要求高。可以细分为稳定性导向方法和优化导向方法:其中,稳定性导向方法有反步法,通过虚拟控制率逐步稳定子系统,适合非线性系统;优化导向方法包括有模型预测控制和线性二次高斯:模型预测控制在线优化未来控制序列,显式处理约束,计算负担较大;线性二次高斯:结合最优控制与状态估计,处理噪声干扰。
(2)无模型的控制方法
该控制方法适用于模型未知或高度不确定场景,适应复杂不确定性,但存在数据需求大、可解释性差等问题。其中,经典方法为PID控制和模糊逻辑控制。在经典方法中,PID控制简单易用,但参数调优困难,适应性差。模糊逻辑控制依赖专家经验,缺乏理论保证。在数据驱动方法中,强化学习通过交互学习最优策略,在动态定位、路径跟踪中验证有效。深度神经网络端到端学习控制映射,需大量训练数据。
(3)混合控制方法
该方法结合了模型先验与数据驱动的优势,通过建立名义模型与学习模型,提高了预测精度,通过基线控制器保证稳定性,通过学习控制器处理不确定性,更加适应复杂的海洋环境。
目前,有关无人船控制方法的摘要如表4所示:
表4 主要的无人船控制方法概述。
|
Category |
Control techniques |
References |
Advantages |
Disadvantages |
Applications |
|
Model-based |
Back-stepping |
参考文献详见论文(下同) |
Recursive design with closed-loop properties |
Sensitive to nonlinearities |
Adaptive USV path following |
|
Sliding mode control |
-- |
Analytical control and robust to disturbances |
Chattering phenomena |
Systems with moderate uncertainties | |
|
Optimal control |
-- |
Constraints and performance optimization |
Model dependence |
USVs with known hydrodynamics | |
|
MPC |
-- |
Handling constraints and quasi-optimality |
Online recursive optimization |
Known hydrodynamics and powerful computation unit | |
|
Model-free |
PID |
-- |
Simplicity and low cost |
Tedious parameter tuning |
Most practical situations |
|
Fuzzy control |
-- |
Simplicity and low cost |
Human subjective decision |
Reliable experiences in complex systems | |
|
RL control |
-- |
Model free with satisfactory empirical performance |
Data dependence and no performance guarantee |
Black-box without model information | |
|
Neural control |
-- |
Approximation of arbitrary nonlinear systems |
Non-explainable |
Abundant data available | |
|
Hybrid |
Hybrid modeling |
-- |
Adaptiveness to uncertainties |
Difficulty in obtaining residual dynamics data |
USVs with uncertainties |
|
Hybrid control |
-- |
Closed-loop properties |
Limited generalizability |
USVs with uncertainties |
六、无人船应用实践
除了关键研究方法外,系统设计实践对于将无人船从理论研究概念过渡到现场操作并最终过渡到成熟的商业产品至关重要。该部分详细介绍无人船的核心硬件组件,通用无人船软件架构以及无人船的测试程序:
在硬件方面,如图3所示,无人船由五个基本系统元素组成:(1)船体;(2)动力和推进系统;(3)感知系统;(4)通信和远程控制系统;(5)计算系统。
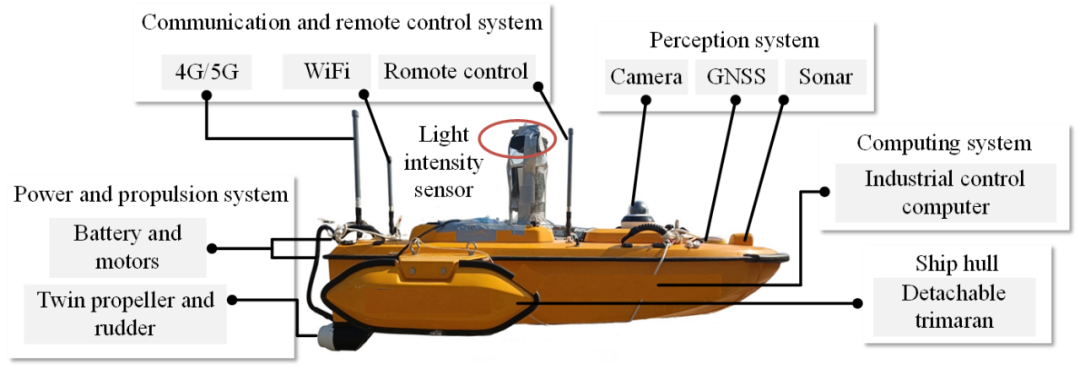
图3 一艘三体无人船的五个关键组成部分:船体、动力与推进系统、感知系统、通信与远程控制系统以及计算系统。
根据具体应用,无人船船体可以采取各种形式,包括单体船体、双体船体,三体船体,甚至创新概念设计。一般来说,多壳结构在抵御环境干扰方面提供了更好的稳定性。在动力和推进系统中,不同的电源系统可用于各种类型的无人船。随着电池能量密度的提高,电池组已成为无人船的热门选择,为了提高效率和减少碳排放,混合动力系统越来越普遍。无人船的感知系统包括各种传感器,提供有关船舶及其导航环境的基本信息。该系统能够监测和评估船舶的船体状态,动力和推进系统,货物,船舶运动和环境条件(如波浪,洋流和风),从而保持态势感知。船舶通信系统有助于船上设备之间,船舶之间以及船舶和海岸之间的数据交换。与通常使用CAN网络的地面车辆不同,船上没有标准的通信协议。可以选择各种交互选项。此外,船舶可以通过无线电、Wi-Fi、蜂窝网络或卫星接收来自控制中心的消息或命令。对于无人船来说,感知、决策和操作处理的各个方面都必须由使用适当算法的计算单元进行管理。随着低功耗、高性能计算芯片的进步,现在实施越来越复杂的算法以增强无人船的计算能力是可行的。此外,云计算技术还可以将密集计算传输到集中式数据处理中心,从而显著减轻机载系统的计算负担。
在软件架构方面,专门为无人船设计的专用软件并不常用,通常对广泛应用于无人驾驶车辆开发的软件进行适度修改,并将其运用于无人船中,主要软件如表5所示。无人船软件主要通过导航模块、系统监控模块以及通信和接口模块进行模块化编程,提高开发调试效率,基于这种软件架构,使用Qt平台和电子海图文件开发特定的无人船软件应用程序,软件界面如图4呈现:
表5 用于无人船的主要软件产品/市场情况(参考文献详见论文)。
|
Software |
Organization |
Applications |
Main features |
|
MOOS-IvP |
MIT |
USVs or autonomous underwater vehicles (AUVs) |
Software suite for robot autonomy |
|
MSS |
NTNU |
Cybership |
Matlab Toolbox |
|
CaraCas |
NASA |
USV Swarm II |
Autonomy architecture (software infrastructure, core executive functions, technology modules) |
|
K-MATE |
Kongsberg |
SEA-KIT USV, and YARA Birkeland |
Common autonomous control engine |
|
USVs-Sim |
Shanghai University |
USV navigation generation and control testing |
General simulation platform including water, environment, infrastructure, vessel, sensors, data generation and analysis module |
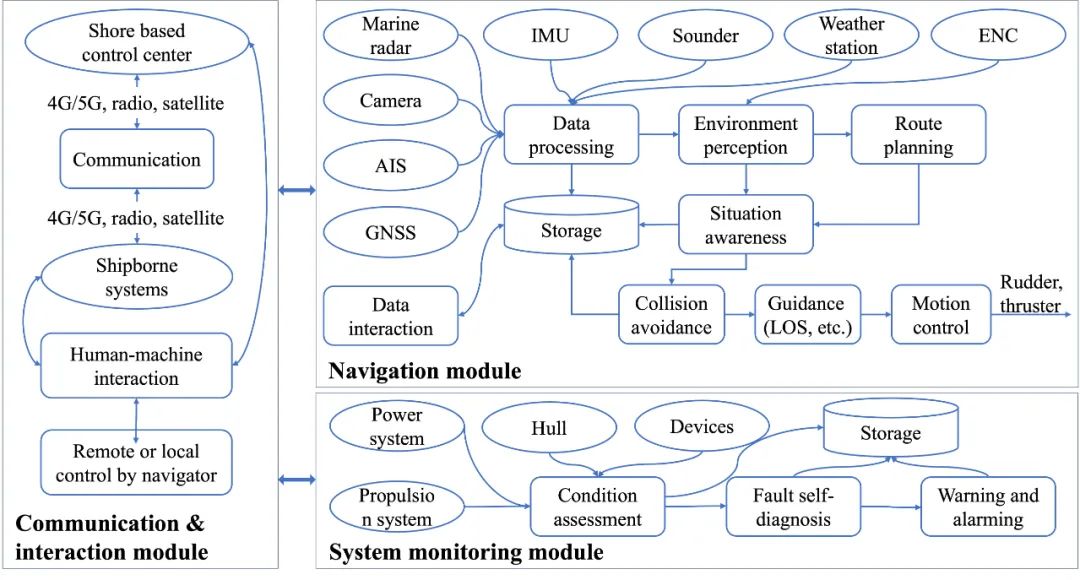
图4 通用USV 软件架构:通信与交互模块、导航模块以及系统监控模块。
随着无人船的发展,对测试相关技术的性能和整体系统可靠性的需求也在不断增长,不同的测试站点在不同的开发阶段有着不同的意义,各种现场试验对无人船及其相互关系的特征如图5所示。根据现场测绘经验,表6列出了无人船测试考虑因素的概述:
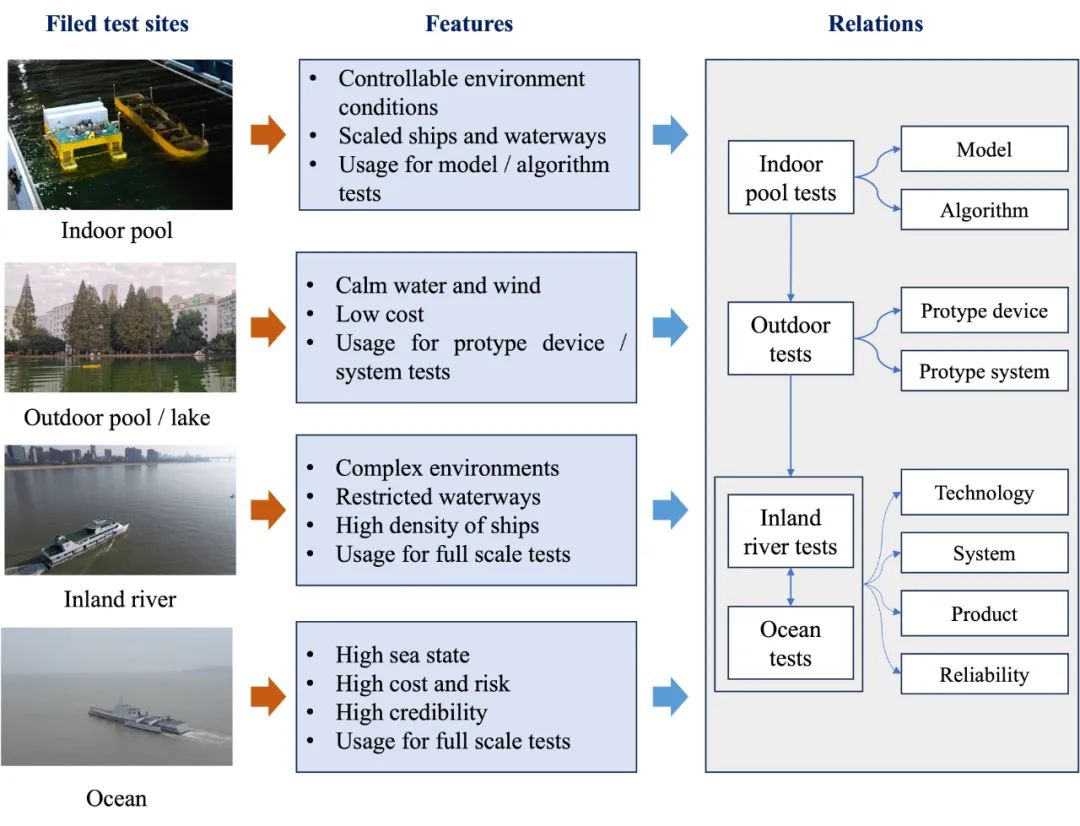
图5 USV 测试地点及测试流程:室内游泳池测试、室外游泳池或湖泊测试、内陆河流测试以及海洋测试。
表6 基于作者们的实践经验,USV测试需考虑的因素。
|
Subsystem |
Functionality testing |
Performance testing |
Reliability testing |
Intelligence testing |
|
Perceiving and recognition subsystem |
1. Environment sensing 2. Object detection 3. Situation awareness |
1. Navigation task planning 2. Collision avoidance 3. Energy saving 4. Autonomous navigation 5. Safe navigation |
1. Rate of target recognition 2. False alarm rate 3. System fault-tolerance 4. System robustness 5. Failure recovery time 6. Communication stability 7. Latency |
1. Human-like testing 2. Turning test 3. Fault self diagnosis 4. Self-learning 5. Automatic early-warning |
|
Decision-making subsystem |
1. Route planning 2. Motion prediction 3. Collision-free trajectory 4. Optimized speed | |||
|
Motion control subsystem |
1. Path following 2. Trajectory tracking 3. Posture control | |||
|
Remote-control subsystem |
1. Remote monitoring 2. Control switching 3. Remote-control |
七、无人船应用场景
无人船最初主要应用于军事领域,随着技术进步已扩展到海洋科研、智能运输等多个领域。根据任务需求,无人船可分为小型侦察艇和大型运输艇等不同类型。
(1)军事应用
无人船在现代军事中发挥着重要作用,可执行多种危险任务,例如在侦察巡逻方面,挪威Seastar 无人船可执行战略巡逻、电子干扰等任务,在反潜作战方面,美国海军使用斯巴达无人船进行反潜侦察;在攻击任务方面,以色列“保护者”无人船可执行反恐、反水雷作战;在部队保护方面,德国M8系列无人船用于港口防卫等任务。可以显著降低人员风险,提高作战效率。
(2)海洋科学研究
无人船为海洋观测带来革命性变革:在环境监测领域,无人船搭载传感器测量水质参数(温度、盐度、叶绿素等)并且可以实时监测缺氧区(如墨西哥湾监测项目),同时利于极地科考(观测浮游生物对极夜的反应)。在海洋测绘领域,无人船可以使用多波束声呐进行海底地形测绘,特别适合浅水区等传统船只难以作业的区域。并且可以作为通信中继,配合水下航行器进行深海观测,显著降低科考成本,提高作业安全性。
(3)智能水上运输
无人船在民用运输领域展现出巨大潜力:在短途货运方面,挪威Mariner 无人船实现全自动终端间运输;中国“新一代航运系统”应用于长江等航道。在创新运输模式方面;欧洲NOVIMAR项目提出“船舶列车(Vessel Train)”概念,美国实行“海上列车(Sea Train)”计划。可显著降低运输成本和人力需求。
八、无人船未来展望
在过去十年中,无人船的快速发展和应用不断增长,完全自主的无人船应用带来了一系列具体和全新的挑战,需要进一步的技术和实践发展。
在技术发展方向,论文中总结出两点改进之处,一是在复杂海洋环境下的敏捷智能航行能力,二是群体协同的智能性。为提高敏捷智能航行能力,可以通过增大船体吨位、采用多体船设计等硬件优化,也可以通过改进传统算法、应用人工智能增强算法能力;为提高群体协同能力,可以通过优化网络设计从而优化通信问题、开发智能任务管理系统确保高效资源分配、在算法中考虑流体干扰等改善无人船集群设计。
在实践方面,论文总结出以下六点改善空间:一是通过采用高性能硬件、优化算法架构提高计算效率;二是优化岸基支持设施,为无人船智能化做好基础;三是通过大语言模型等人工智能技术提高人机交互体验;四是加强数据加密和身份认证,保证无人船网络安全;五是推广无人船普及,通过试点项目展示应用潜力,促进商业化;六是制定灵活的标准,完善无人船的法律法规。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









