








{承接CNN学习入门,笔者在这里对Caffe官方网站上的相关介绍进行了翻译总结,欢迎大家交流指正}
本文基于此刻最新的release,Caffe-rc3:
Solver:
solver通过将前向传播的推演与反向传播的参数更新相互协调,来达到减小loss的目的。
学习过程分化为两部分,Solver监督优化目标并进行权重更新,Net计算Loss与Gradient。
Caffe的solver包括:
Stochastic Gradient Descent (type: "SGD"),
AdaDelta (type: "AdaDelta"),
Adaptive Gradient (type: "AdaGrad"),
Adam (type: "Adam"),
Nesterov’s Accelerated Gradient (type: "Nesterov") and
RMSprop (type: "RMSProp")1.依据优化目标,逐层搭建training network用于学习,test network用于测试当前性能。
2.通过调用forward / backward以及参数更新来迭代优化目标。
3.每隔一段时间测试网络性能。
4.在优化过程中保存caffemodel与solverstate的快照。
在每轮迭代中:
1.调用前传计算output与loss。
2.调用反传计算gradient。
3.根据solver的method,将梯度值融入参数更新之中。
4.根据学习率,当前状态,solver method来更新solver state。
将网络的权值参数由刚初始化的状态调整为一个训练好的模型。
比如Caffe model,Caffe solver可以在CPU/GPU两种model下运行。
Methods:
solver method 用于解决损失函数最小化类型的优化问题。
对于数据集D而言,其优化目标为全数据集|D|个数据样例的平均损失。

f_W(x(i))为数据样例x(i)的损失,r(W)是权值的正则化项,lambda是系数。
|D|的数目可能非常大,在实际操作中,我们选用随机近似的方法,选取mini-batch N << |D|,得到近似损失:

模型在前向传播中计算f_W(x),在后向传播中计算梯度。
权值参数delta_W的更新是由误差项梯度gradient_f_W()与正则项梯度gradient_r(W)共同组成的。
SGD:
Stochastic gradient descent (type: "SGD")
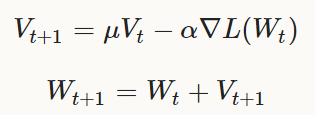
权值W的更新,是负梯度delta_L(W)和之前的权值更新结果V_t的线性组合,学习率alpha是负梯度的系数。
momentum Mu是之前的权值更新结果的系数。
形式上,我们得到如下公式用于计算在第t+1次迭代中,权值更新结果V_t+1与被更新的权重W_t+1,
已知之前的权值更新结果V_t与当前的权值W_t:
为了得到最好的结果,alpha与Mu需要进行一些微调,可以参照下文的一些方法,也可以参照:
Leon Bottou’s Stochastic Gradient Descent Tricks。
Rules of thumb for setting the learning rate α and momentum μ:
比较好的,用于深度学习的SGD策略,将学习率初始化到α≈0.01=1E−2。
当loss不再下降时,使其衰减(比如缩减为原十分之一),重复多次。
一般的,你会使用momentum μ=0.9或者类似的值,使得权值更新随着迭代过程更加平滑。
momentum 使得SGD方法下的深度学习更加稳定和迅速。
获得一个类似的学习率更新策略,你可以将如下内容加进solver prototxt文件中:
base_lr: 0.01 # begin training at a learning rate of 0.01 = 1e-2
lr_policy: "step" # learning rate policy: drop the learning rate in "steps"
# by a factor of gamma every stepsize iterations
gamma: 0.1 # drop the learning rate by a factor of 10
# (i.e., multiply it by a factor of gamma = 0.1)
stepsize: 100000 # drop the learning rate every 100K iterations
max_iter: 350000 # train for 350K iterations total
momentum: 0.9完成第100K-200K次迭代,然后以此类推,最终在350K次迭代后完成训练(max_iter),学习率降为α‴=1E−5。
{译者注:下一段翻译译者水平有限,可能有理解错误,敬请核查原文}
请注意,momentum 设定为μ,在多轮迭代之后,实际上对权值的更新值V乘了系数1/(1-Mu)。如果增加Mu的话,
相应的减小alpha是一个好方法。反之亦然。
举个例子,设定Mu=0.9,实际上乘子是10,如果我们将Mu提升为0.99,乘子相应增加为100,那么我们需要将drop的因子设定为10。
即学习率alpha的衰减系数为0.1。{译者注,更新V时的后项由于衰减0.1,100*0.1=10,仍维持后项缩放系数不变。}
Note:
上文的方法只是一些参考,并不能保证在所有情况收敛到最优(甚至可能完全失效)。
如果训练过程发散了,请尝试降低学习率,然后重新训练,直到发现起作用的lr。
AdaDelta:
是一种健壮的学习率更新方法,也是一种基于梯度的最优化方案(like SGD)。
更新式为:
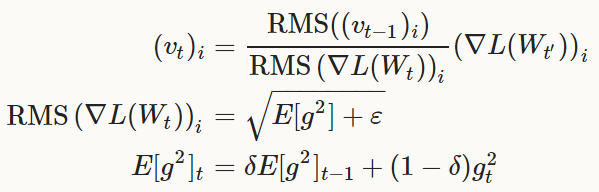
以及:

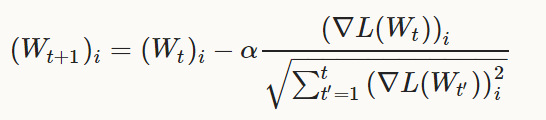
AdaGrad:
adaptive gradient (type: "AdaGrad")
这种基于梯度的最优化方案类似于“吹尽黄沙始见金”,发现一些预见性的但不显见的特征。
参考了之前所有迭代中的更新信息:
t′∈{1,2,...,t}
更新式为下式,权值W中的每一个元素下标为i:
Note:
在实际操作中,权值W∈R^d,AdaGrad实现的用于存储历史梯度信息的额外存储空间是O(d)的(而不是O(dt),
将每一次的迭代的历史梯度信息分别记录)。
Adam:
也是一种基于梯度的最优化方案(like SGD),其中包括“自适应矩估计法”(m_t,v_t),可以被认为是泛化的AdaGrad方法:

以及:
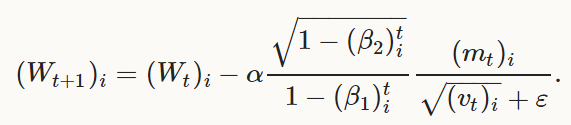
文献中取:β1=0.9,β2=0.999,ε=1E−8为初始值,Caffe中可以通过分别指定:momemtum, momentum2, delta,
来对应于β1,β2,ε。
Scaffolding:
Solver::Presolve()
准备优化算法并初始化网络模型:
> caffe train -solver examples/mnist/lenet_solver.prototxt
I0902 13:35:56.474978 16020 caffe.cpp:90] Starting Optimization
I0902 13:35:56.475190 16020 solver.cpp:32] Initializing solver from parameters:
test_iter: 100
test_interval: 500
base_lr: 0.01
display: 100
max_iter: 10000
lr_policy: "inv"
gamma: 0.0001
power: 0.75
momentum: 0.9
weight_decay: 0.0005
snapshot: 5000
snapshot_prefix: "examples/mnist/lenet"
solver_mode: GPU
net: "examples/mnist/lenet_train_test.prototxt"
I0902 13:35:56.655681 16020 solver.cpp:72] Creating training net from net file: examples/mnist/lenet_train_test.prototxt
[...]
I0902 13:35:56.656740 16020 net.cpp:56] Memory required for data: 0
I0902 13:35:56.656791 16020 net.cpp:67] Creating Layer mnist
I0902 13:35:56.656811 16020 net.cpp:356] mnist -> data
I0902 13:35:56.656846 16020 net.cpp:356] mnist -> label
I0902 13:35:56.656874 16020 net.cpp:96] Setting up mnist
I0902 13:35:56.694052 16020 data_layer.cpp:135] Opening lmdb examples/mnist/mnist_train_lmdb
I0902 13:35:56.701062 16020 data_layer.cpp:195] output data size: 64,1,28,28
I0902 13:35:56.701146 16020 data_layer.cpp:236] Initializing prefetch
I0902 13:35:56.701196 16020 data_layer.cpp:238] Prefetch initialized.
I0902 13:35:56.701212 16020 net.cpp:103] Top shape: 64 1 28 28 (50176)
I0902 13:35:56.701230 16020 net.cpp:103] Top shape: 64 1 1 1 (64)
[...]
I0902 13:35:56.703737 16020 net.cpp:67] Creating Layer ip1
I0902 13:35:56.703753 16020 net.cpp:394] ip1 <- pool2
I0902 13:35:56.703778 16020 net.cpp:356] ip1 -> ip1
I0902 13:35:56.703797 16020 net.cpp:96] Setting up ip1
I0902 13:35:56.728127 16020 net.cpp:103] Top shape: 64 500 1 1 (32000)
I0902 13:35:56.728142 16020 net.cpp:113] Memory required for data: 5039360
I0902 13:35:56.728175 16020 net.cpp:67] Creating Layer relu1
I0902 13:35:56.728194 16020 net.cpp:394] relu1 <- ip1
I0902 13:35:56.728219 16020 net.cpp:345] relu1 -> ip1 (in-place)
I0902 13:35:56.728240 16020 net.cpp:96] Setting up relu1
I0902 13:35:56.728256 16020 net.cpp:103] Top shape: 64 500 1 1 (32000)
I0902 13:35:56.728270 16020 net.cpp:113] Memory required for data: 5167360
I0902 13:35:56.728287 16020 net.cpp:67] Creating Layer ip2
I0902 13:35:56.728304 16020 net.cpp:394] ip2 <- ip1
I0902 13:35:56.728333 16020 net.cpp:356] ip2 -> ip2
I0902 13:35:56.728356 16020 net.cpp:96] Setting up ip2
I0902 13:35:56.728690 16020 net.cpp:103] Top shape: 64 10 1 1 (640)
I0902 13:35:56.728705 16020 net.cpp:113] Memory required for data: 5169920
I0902 13:35:56.728734 16020 net.cpp:67] Creating Layer loss
I0902 13:35:56.728747 16020 net.cpp:394] loss <- ip2
I0902 13:35:56.728767 16020 net.cpp:394] loss <- label
I0902 13:35:56.728786 16020 net.cpp:356] loss -> loss
I0902 13:35:56.728811 16020 net.cpp:96] Setting up loss
I0902 13:35:56.728837 16020 net.cpp:103] Top shape: 1 1 1 1 (1)
I0902 13:35:56.728849 16020 net.cpp:109] with loss weight 1
I0902 13:35:56.728878 16020 net.cpp:113] Memory required for data: 5169924
I0902 13:35:56.728893 16020 net.cpp:170] loss needs backward computation.
I0902 13:35:56.728909 16020 net.cpp:170] ip2 needs backward computation.
I0902 13:35:56.728924 16020 net.cpp:170] relu1 needs backward computation.
I0902 13:35:56.728938 16020 net.cpp:170] ip1 needs backward computation.
I0902 13:35:56.728953 16020 net.cpp:170] pool2 needs backward computation.
I0902 13:35:56.728970 16020 net.cpp:170] conv2 needs backward computation.
I0902 13:35:56.728984 16020 net.cpp:170] pool1 needs backward computation.
I0902 13:35:56.728998 16020 net.cpp:170] conv1 needs backward computation.
I0902 13:35:56.729014 16020 net.cpp:172] mnist does not need backward computation.
I0902 13:35:56.729027 16020 net.cpp:208] This network produces output loss
I0902 13:35:56.729053 16020 net.cpp:467] Collecting Learning Rate and Weight Decay.
I0902 13:35:56.729071 16020 net.cpp:219] Network initialization done.
I0902 13:35:56.729085 16020 net.cpp:220] Memory required for data: 5169924
I0902 13:35:56.729277 16020 solver.cpp:156] Creating test net (#0) specified by net file: examples/mnist/lenet_train_test.prototxt
I0902 13:35:56.806970 16020 solver.cpp:46] Solver scaffolding done.
I0902 13:35:56.806984 16020 solver.cpp:165] Solving LeNet
Updating Parameters:
实际上权值更新是由solver执行的,并运用在调用Solver::ComputeUpdateValue()时完成对网络参数的更新。
ComputeUpdateValue()将权值的损失项r(W){译者注,即loss函数中包含的lambda||W||^2项}并入权值梯度一同计算,得到对应于每一个权值的最终梯度。这些存储在blob的diff内的梯度信息通过学习率alpha放缩,用于在Blob::Update方法调用时,通过data-diff的方式,完成最终的更新。
Snapshotting and Resuming:
Solver通过函数Solver::Snapshot()和Solver::SnapshotSolverState(),存储网络权值以及此刻状态的快照。
权值的快照导出了网络模型,而solver的快照使得从任意时刻恢复训练成为可能,训练可以通过调用Solver::Restore()以及Solver::RestoreSolverState()进行恢复。
权值文件以.caffemodel扩展名结尾,状态文件以.solverstate扩展名结尾。
两种文件在文件名中都以_iter_N形式说明迭代的轮数。
Snapshotting 配置为:
# The snapshot interval in iterations.
snapshot: 5000
# File path prefix for snapshotting model weights and solver state.
# Note: this is relative to the invocation of the `caffe` utility, not the
# solver definition file.
snapshot_prefix: "/path/to/model"
# Snapshot the diff along with the weights. This can help debugging training
# but takes more storage.
snapshot_diff: false
# A final snapshot is saved at the end of training unless
# this flag is set to false. The default is true.
snapshot_after_train: true













 3159
3159











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









