










写在前面
话说第一次完整的编写矩阵求逆函数是在写结构力学求解器时候,那时候用的是初等变换法,效率较低,不过那时候还没顾得上效率,求解器没有开发完整,记得只支持连续跨简支梁求弯矩(不记得这个术语还准确不...),好吧,是时候引出正文了。

4X4转换矩阵求逆方法
求逆矩阵方法很多,效率不一,而研究矩阵数据结构的设计就可以是一个领域了,怎么样占用内存小?怎么样运算效率高,当然本文不涉及这些的研究,有兴趣可以自行搜索学习这方面知识。
https://zhuanlan.zhihu.com/p/50093662
https://www.cnblogs.com/johnson0522/archive/2009/06/09/1499515.html
常用的有待定系数法、初等变换法、伴随矩阵法,当然对于固定阶的矩阵可以直接推出逆矩阵行列元素的值。
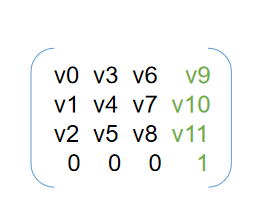
先说下图形学中转换矩阵逆矩阵快速求法吧。注意此处的是矩阵乘列向量形式的转换矩阵求逆,即求逆的过程中利用了第三行是0 0 0 1的特点。
// 求4x4 矩阵的逆矩阵
// m 源矩阵 mi 源矩阵的逆矩阵
bool MatrixInverse(const Transform* trs, Transform* trsRe)
{
const float* values = trs->values();
// 矩阵的行列式
float det = (values[0] * (values[4] * values[8] - values[7] * values[5]) -
values[3] * (values[1] * values[8] - values[7] * values[2]) +
values[6] * (values[1] * values[5] - values[4] * values[2]));
// 先判断行列式是否为0。
if (abs(det) < 1e-6)
return false;
float det_inv = 1.0f / det;
array<float, 12> valuesRe;
valuesRe[0] = det_inv * (values[4] * values[8] - values[7] * values[5]);
valuesRe[3] = -det_inv * (values[3] * values[8] - values[6] * values[5]);
valuesRe[6] = det_inv * (values[3] * values[7] - values[6] * values[4]);
valuesRe[9] = -(valuesRe[0] * values[9] + valuesRe[3] * values[10] + valuesRe[6] * values[11]);
valuesRe[1] = -det_inv * (values[1] * values[8] - values[7] * values[2]);
valuesRe[4] = det_inv * (values[0] * values[8] - values[6] * values[2]);
valuesRe[7] = -det_inv * (values[0] * values[7] - values[6] * values[1]);
valuesRe[10] = -(valuesRe[1] * values[9] + valuesRe[4] * values[10] + valuesRe[7] * values[11]);
valuesRe[2] = det_inv * (values[1] * values[5] - values[4] * values[2]);
valuesRe[5] = -det_inv * (values[0] * values[5] - values[3] * values[2]);
valuesRe[8] = det_inv * (values[0] * values[4] - values[3] * values[1]);
valuesRe[11] = -(valuesRe[2] * values[9] + valuesRe[5] * values[10] + valuesRe[8] * values[11]);
trsRe->setValues(&(valuesRe[0]));
return true;
}其实这里用的是3X3矩阵求逆的伴随矩阵法+待定系数法来求解4X4的转换矩阵逆矩阵。
伴随矩阵法:详细请打开线性代数书籍或搜索。
定理:n阶矩阵A=[a ij]
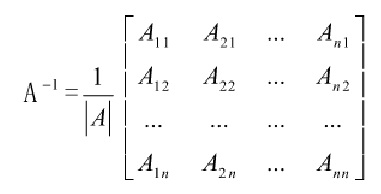

注意上述代码中矩阵的values是这样排列的,请对应换成自己的矩阵结构中的元素,
初等变换法求NxN矩阵的逆矩阵
c++代码
void MatrixAXA::GetInverseMatrix(const MatrixAXA& matPara, MatrixAXA& matInverse)
{
MatrixAXA mat(matPara);
// �����
int nStep = mat.m_mat.size();
matInverse = MatrixAXA(nStep);
for (int i = 0; i < nStep; i++)
{
matInverse.m_mat[i][i] = 1.0;
}
// �õ�һ�н��·��еĵ�һ�б�Ϊ0���ڶ��н��·��еĵڶ��б�Ϊ0...
for (int i = 0; i < mat.m_mat.size() - 1; i++)
{
if (RealEq(mat.m_mat[i][i], 0.0))
{
// �����i�еĵ�i��Ϊ0
int nTemp = 0;
for(auto ptrRow = mat.m_mat.begin(); ptrRow != mat.m_mat.end(); ++ptrRow)
{
if (!RealEq(mat.m_mat[ptrRow->first][i], 0.0) && ptrRow->first > i)
{
nTemp = ptrRow->first;
break;
}
}
// ��i�и��м��ϸ��и��еõ��µĵ�i��
for (int colum_i = 0; colum_i < mat.m_mat[i].size(); colum_i++)
{
mat.m_mat[i][colum_i] += mat.m_mat[nTemp][colum_i]; // ******
matInverse.m_mat[i][colum_i] += matInverse.m_mat[nTemp][colum_i]; // ******
}
}
// �任Ŀ���е�i��Ϊ0
for (int j = i + 1; j < mat.m_mat.size(); j++)
{
if (RealEq(mat.m_mat[j][i], 0.0) ||
RealEq(mat.m_mat[i][i], 0.0))
continue;
double dTemp = -mat.m_mat[j][i] / mat.m_mat[i][i];
for (int colum_i = 0; colum_i < mat.m_mat[j].size(); colum_i++)
{
mat.m_mat[j][colum_i] += mat.m_mat[i][colum_i] * dTemp; // ******
matInverse.m_mat[j][colum_i] += matInverse.m_mat[i][colum_i] * dTemp; // ******
}
}
}
// �����������һ�н�ǰ���еĵ�nStep�б任Ϊ0...
for (int rowInv = nStep - 1; rowInv > 0; rowInv--)
{
for (int row_i = rowInv - 1; row_i >= 0; row_i--)
{
if (RealEq(mat.m_mat[row_i][rowInv], 0.0) ||
RealEq(mat.m_mat[rowInv][rowInv], 0.0))
continue;
// �任
double dTemp = -mat.m_mat[row_i][rowInv] / mat.m_mat[rowInv][rowInv];
for (int colum_i = 0; colum_i < mat.m_mat[row_i].size(); colum_i++)
{
mat.m_mat[row_i][colum_i] += dTemp * mat.m_mat[rowInv][colum_i]; // ******
matInverse.m_mat[row_i][colum_i] += dTemp * matInverse.m_mat[rowInv][colum_i]; // ******
}
}
}
// �����е�λ��
for (int row_i = 0; row_i < nStep; row_i++)
{
double dTe1 = mat.m_mat[row_i][row_i];
for (int colum_i = 0; colum_i < nStep; colum_i++)
{
if (RealEq(mat.m_mat[row_i][row_i], 0.0)) continue;
mat.m_mat[row_i][colum_i] /= dTe1; // ******
matInverse.m_mat[row_i][colum_i] /= dTe1; // ******
}
} // end for
}c#代码
/// <summary>
/// 求逆矩阵
/// 初等变换法
/// </summary>
public static void GetInverseMatrix(MatrixAXA matPara, ref MatrixAXA matInverse)
{
var mat = new MatrixAXA(matPara);
// 单位矩阵
int nStep = mat.m_mat.Count;
matInverse = new MatrixAXA(nStep);
for (int i = 0; i < nStep; i++)
{
matInverse.m_mat[i][i] = 1.0;
}
// 用第一行将下方行的第一列变为0,第二行将下方行的第二列变为0...
for (int i = 0; i < mat.m_mat.Count - 1; i++)
{
if (MathTool.RealEq(mat.m_mat[i][i], 0.0))
{
// 如果第i行的第i列为0
int nTemp = 0;
foreach (var item in mat.m_mat.Keys)
{
if (!MathTool.RealEq(mat.m_mat[item][i], 0.0) && item > i)
{
nTemp = item;
break;
}
}
// 第i行各列加上该行各列得到新的第i行
for (int colum_i = 0; colum_i < mat.m_mat[i].Count; colum_i++)
{
mat.m_mat[i][colum_i] += mat.m_mat[nTemp][colum_i]; // ******
matInverse.m_mat[i][colum_i] += matInverse.m_mat[nTemp][colum_i]; // ******
}
}
// 变换目标行第i列为0
for (int j = i + 1; j < mat.m_mat.Count; j++)
{
if (MathTool.RealEq(mat.m_mat[j][i], 0.0) ||
MathTool.RealEq(mat.m_mat[i][i], 0.0))
continue;
double dTemp = -mat.m_mat[j][i] / mat.m_mat[i][i];
for (int colum_i = 0; colum_i < mat.m_mat[j].Count; colum_i++)
{
mat.m_mat[j][colum_i] += mat.m_mat[i][colum_i] * dTemp; // ******
matInverse.m_mat[j][colum_i] += matInverse.m_mat[i][colum_i] * dTemp; // ******
}
}
}
// 反过来,最后一行将前面行的第nStep列变换为0...
for (int rowInv = nStep - 1; rowInv > 0; rowInv--)
{
for (int row_i = rowInv - 1; row_i >= 0; row_i--)
{
if (MathTool.RealEq(mat.m_mat[row_i][rowInv], 0.0) ||
MathTool.RealEq(mat.m_mat[rowInv][rowInv], 0.0))
continue;
// 变换
double dTemp = -mat.m_mat[row_i][rowInv] / mat.m_mat[rowInv][rowInv];
for (int colum_i = 0; colum_i < mat.m_mat[row_i].Count; colum_i++)
{
mat.m_mat[row_i][colum_i] += dTemp * mat.m_mat[rowInv][colum_i]; // ******
matInverse.m_mat[row_i][colum_i] += dTemp * matInverse.m_mat[rowInv][colum_i]; // ******
}
}
}
// 将各行单位化
for (int row_i = 0; row_i < nStep; row_i++)
{
double dTe1 = mat.m_mat[row_i][row_i];
for (int colum_i = 0; colum_i < nStep; colum_i++)
{
if (MathTool.RealEq(mat.m_mat[row_i][row_i], 0.0)) continue;
mat.m_mat[row_i][colum_i] /= dTe1; // ******
matInverse.m_mat[row_i][colum_i] /= dTe1; // ******
}
} // end for
}C++和C#的都经过测试,不过代码是几年前写的,要参考的自行去重构吧~
总结
本文算是待定系数法、初等变换法、伴随矩阵法都有所介绍和应用,好了就到这里。















 7237
7237











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









