







该系列内容比较基础,仅是方便我们实验室小萌新入门。(最近太忙了,更慢了)
基于backward warping的可微图像采样(Differentiable image sampling)已经广泛应用于深度估计(depth estimation)、光流预测(optical flow prediction)等任务中。
ps:Differentiable image sampling在论文 Spatial Transformer Networks 中有描述。
简单的说,内插帧的原理即:假定输入的两帧为 和
,
, 这里的H和W是图像的高和宽,也就是视频的分辨率中的高和宽。视频内插帧的目标是生成两帧间 t 时刻的帧
,
。
在插帧方法中,有一类是基于流(flow-based)的方法,即结合了光流估计(optical flow estimation)来合成中间帧。基本的流程大致如下:
1. 通过输入的两个参考帧 和
,基于光流估计算法得到双向光流(bi-directional optical flow),记为
和
:
到
的光流
:
到
的光流
由于中间帧不可用,因此通过变换前后参考帧之间的流,然后对其进行投影以模拟中间帧和参考帧之间的流。
2. 基于得到的光流,warping 输入的参考帧,去预测中间帧,这里就根据warping的方式可分为两类:
1)forward warping
- 基于
,估计
时刻的光流
,通过
forward warping
,得到中间帧
- 基于
,估计
,通过
,得到中间帧
但是forward warping会出现孔洞(holes)问题。本系列上一篇文章介绍过,这里再简单直观地说明一下 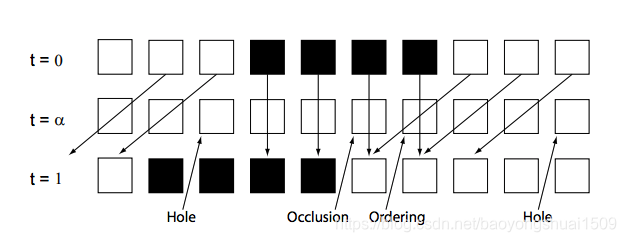
表示时域关系,第一行和第三行表示
和
。箭头指向即前向流。上图描述了三个问题:
(1) holes 问题,即在中间时刻 ,没有流经过中间帧的某些像素点;
(2) ordering 问题,即在中间时刻 ,有多个流经过中间帧的某些像素点;
(3) occlusion问题,即在 ,有多个流指向相同的位置。
2)backward warping
- 基于
,通过
- 基于
,通过

















 1289
1289

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









