







运动控制和电机驱动单元
运动控制的一个典型的例子是各种马达的定位控制。通过给马达提供电能,马达运转并将其转换为动能。该技术在机床、机器人控制、半导体制造设备、注塑机和数字家电检测机中发挥着关键作用。
运动控制板具有以指定脉冲数或频率输出脉冲串的功能。可根据目标位置、速度、加速度和减速度等运动参数自动输出控制脉冲。具有用于定位控制的各种限位输入功能。电机驱动器控制电机本身。运动控制板为电机驱动器单元输出脉冲信号并控制电机。它与脉冲输入型步进电机或伺服电机连接。

电机驱动器单元是驱动步进电机和/或伺服电机的控制单元。设置/获取该驱动器单元的控制信号可实现电机控制。
步进电机
步进电机可进行高精度定位。通过与输入脉冲同步,步进电机以一定的角度逐级旋转。步进电机可精确地旋转输入脉冲,因此无需检测旋转量即可进行高精度定位。一般分辨率为1步(1脉冲)=1.8°、0.72°、0.36°。
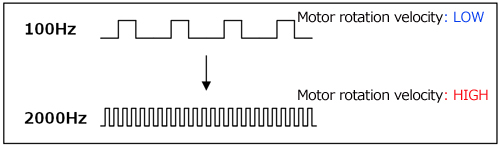
步进电机的转速与脉冲信号速度成正比,转速与脉冲信号的关系由下式确定,脉冲个数决定转动量,脉冲频率决定转速。
电机旋转速度(r/min)=步距角(°)/360°×脉冲速度(频率:Hz)×60
丢步是指由于速度(加速、减速)急剧变化或负载过大,步进电机无法与脉冲同步旋转,从而导致停止或定位偏移。近些年新型的步进电机具有不会发生丢步的结构。
伺服电机
伺服电机有两种类型:交流伺服电机和直流伺服电机。伺服电机广泛应用于制造工厂的机床和工业机器人。伺服电机带有编码器来检测旋转角度,并在闭环上进行高精度定位。我们的运动控制板适用于脉冲输入型伺服电机。
由于能够产生较大的加速和减速扭矩,因此即使在过载或脉冲速度突然变化的情况下也不会丢失步骤,从而实现高速响应。
PTP 运动
PTP 运动是指从一个点到另一个点(点对点)的移动。它用于简单的定位控制。我们的运动控制板即使在运动过程中也能按所需时间改变停止位置。下图表示在加速/恒速运动期间将目标位置进一步改变的情况。例如,在从起点移动到 3000 脉冲点的过程中,可以在不暂停的情况下将该点更改为 5000 脉冲点。

JOG运动
JOG动作是无移动距离指定的移动动作,用于手动电机定位,电机持续运转直至±LIM信号输入或停止指令,可在运转中随时改变速度、加减速时间。
ORG运动
ORG(原点返回)运动是将电机移至原点的运动。我们能够实现独特的原点返回运动,如下所示。通过原点返回运动设置,将 ORG 运动设置为运动类型,当运动开始时,驱动器自动控制直到原点返回完成。
恒速/直线加减速/S曲线加减速
恒速运动:以恒定的速度(频率)输出脉冲,设备以恒定的速度运动,在启动和停止时,速度发生突变。
直线加减速运动:通过在启动和停止时以恒定速率加速/减速来吸收启动和停止时的冲击的运动。 它也被称为梯形速度控制。
S曲线加减速运动:速度控制方法进一步减小了直线加减速运动中的突变冲击,通过减小加减速启动和停止时的加速度,减小了运动启动和停止时的冲击。
插补控制
三种多轴控制类型,当控制 2 个以上的轴时从起点移动到目标点。
PTP 控制(点对点)
首先将 X 轴移动到点 (Xt),然后将 Y 轴移动到点 (Yt)。
线性插值
X 轴和 Y 轴的坐标控制,并移动到点 (Xt, Yt),使轨迹遵循线性轮廓。
圆弧插补
指定圆心坐标及圆上的目标点,同步控制X轴及Y轴,将目标点移动到(Xt,Yt),使轨迹按照编程轮廓移动。




















 1041
1041

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











