






基于MVB-C140的超速抓拍系统设计
Binda-Z 目博科技有限公司 2010-3-30
一、系统组成
超速抓拍系统主要由工业相机,车检器和闪光灯三部分组成,本文选用了高清网络摄像机MVB-C140,双通道测速车辆检测器MVB-D2,以及普通80W防眩频闪补光灯。
MVB-C140是一款分辨率为1360 X 1024的高清网络摄像机。每秒最多可抓拍7.5帧图像,完全能记录所有经过车辆。它的最大抓拍延时仅为135ms,这就是说,当一辆车子以时速250km/h经过线圈时,从触发到被抓拍这个时间段向前移动了9.4m,因此它将逃不出相机的法眼。相机的曝光时间可调范围为0us~133ms,能适应不同光照环境。
MVB-D2是一款双通道测速车检器,能检测出经过车辆的速度,并通过RS232接口发送出去。
防眩频闪灯的功率到达80W,在夜间能提供足够的亮度,并且其响应时间不足1ms。
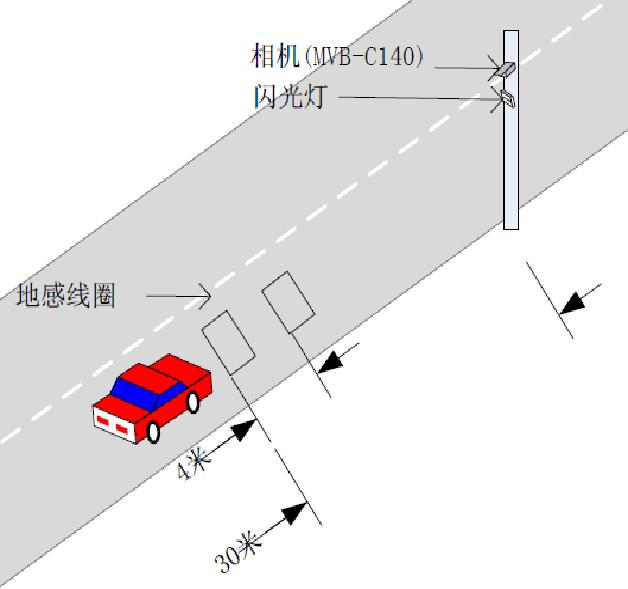
系统的安装如上图所示,两个线圈的距离为4米,第一个线圈到相机处的水平距离为30米。相机、车检器和电源都安放到防护罩内,线圈引线双绞后接到车检器的输入端口中,并把输出端口接到相机上,当有车经过时,车检器会将车速通过RS232接口传递给相机,相机再判断是否超速,如果超速则执行抓拍动作。补光灯安装在相机的下方,当光线太暗时,相机会在抓拍时开启闪光灯。
超速抓拍的图片通过网络可以直接传输到控制中心或者传输到路口的工控机,数据包中包含了车速信息。
三、系统设置
为了使测速和抓拍获得最大的精确度,并能够获取最佳的图像质量,需要根据不同安装环境对系统进行设置。主要包括车检器灵敏度的设置,线圈距离的设置,相机参数的设置,闪光灯亮度的设置等。
车检器灵敏度设置:由于各个安装点线圈所用材料,埋入路面的深度等都不尽相同,会使得线圈的灵敏度也各不相同,这就需要调节车检器的灵敏度等级了。如果线圈的灵敏度较高,那么车检器的灵敏度级别就要降低,防止感应到三轮车等非机动车。如果线圈灵敏度较低,那么车检器的灵敏度级别就要调高,以免机动车经过时,没有被检测到。
相机参数设置:由于相机需要执行判断车速,控制闪光灯,调节图像亮度,上传图像等工作,所以其设置相应较多。
首先要设置线圈距离,因为实际埋设线圈可能会产生误差,所以要量得实际的线圈距离,否则测得的速度会有较大误差。
其次设置闪光灯的响应时间,不同闪光灯的响应时间会有所不同,有的响应快,有的响应满,因此需要进行设置,例如本例的闪光灯的响应时间为1ms 。
接着设置图像最佳亮度,因为随着太阳的东升西落,环境的亮度会产生变化,这就需要实时调节曝光时间和增益,使得图像不太亮也不太暗。本例中将相机设为自动 增益曝光模式,并将最佳平均亮度值设为60 ,其中图像的亮度变化范围为0~255 。

相机设置软件
闪光灯设置:闪光灯的亮度需要根据相机和线圈的实际距离进行调整,如果相机和线圈距离较大,那么闪光灯要亮些,相机和线圈距离较近,那么闪光灯应当暗些。
四、系统的特点
本系统将车检器和摄像机机直接相连,不再需要控制器进行抓拍控制,有效地降低了抓拍延时,并简化了系统结构,同时缩减了系统成本。
在南北向的道路上应用时发现,正午阳光强烈的情况下,车子的强反光引起CCD 产生漏光现象,从而导致图像中出现长白条,将部分车牌字符掩盖了。缓解方法:在南北向的路上,相机避免安装在道路的中央,而应当放置在道路边上,再把镜头对准道路中央,这样能较好地避免车子的强反光。
五、 结论
本系统在单车道的实际测试中能到达很好的效果,对环境的适应能力较强,在雨天或者阴天较暗时相机能自动开启闪光灯进行补光,达到最佳的图像质量。夜晚时由于使用了频闪补光灯,能够有效的抑制车头大灯干扰。















 144
144

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









