






基于欧姆龙PLC的花样喷泉控制系统设计喷泉电气控制设计音乐喷泉
带解释的梯形图程序,接线图原理图图纸,io分配,组态画面
ID:2260668773205719
Holly123~
基于欧姆龙PLC的花样喷泉控制系统设计
摘要:
花样喷泉作为一种创新的景观设计,能够通过水流的喷射和灯光的变化,营造出美轮美奂的视觉效果。本文基于欧姆龙PLC,设计了一套高效可靠的花样喷泉控制系统。通过梯形图程序、接线图、原理图和组态画面的设计与实现,实现了对喷泉的电气控制、音乐匹配等功能,为喷泉的运行带来了更多的变化和乐趣。
-
引言
花样喷泉作为一种独特的景观设计,受到了广大市民的热爱与欢迎。传统的花样喷泉控制系统存在着控制复杂、操作困难等问题。为了提高花样喷泉的控制效果,本文基于欧姆龙PLC,设计了一套高效可靠的控制系统,以满足人们对喷泉控制的需求。 -
系统设计
2.1 PLC选择
本文选择欧姆龙PLC作为花样喷泉控制系统的核心控制器。欧姆龙PLC具有高性能、可靠性和扩展性,适用于复杂的控制场景。
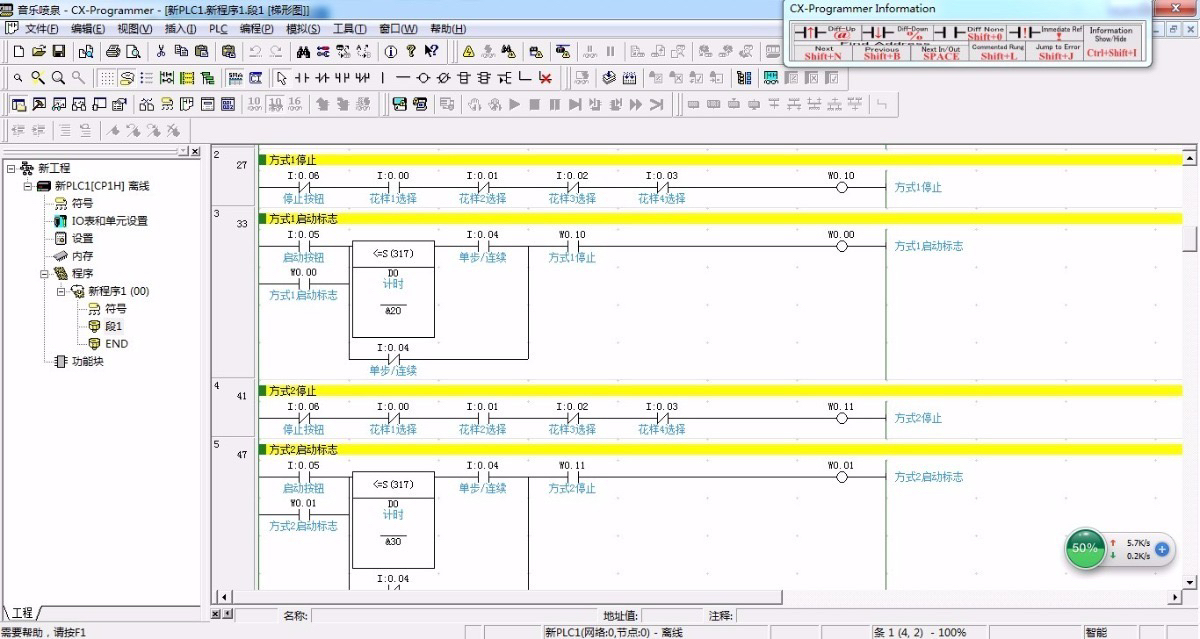
2.2 梯形图程序设计
梯形图程序是花样喷泉控制系统的核心控制逻辑。本文通过对喷泉控制需求的分析,设计了一套简洁清晰的梯形图程序。该程序能够根据输入信号的变化,实时控制喷泉的启停、水流的强弱、灯光的变化等功能。
2.3 接线图与原理图设计
喷泉的电气控制离不开精确的接线图和原理图设计。本文通过对花样喷泉的电气元器件进行分析和选择,设计了符合控制要求的接线图和原理图。这些图纸为喷泉的安装和维护提供了便利。
2.4 IO分配
IO分配是花样喷泉控制系统设计中的关键环节。本文根据喷泉的各个功能需求,合理分配了IO资源,确保了控制系统的稳定性和可靠性。
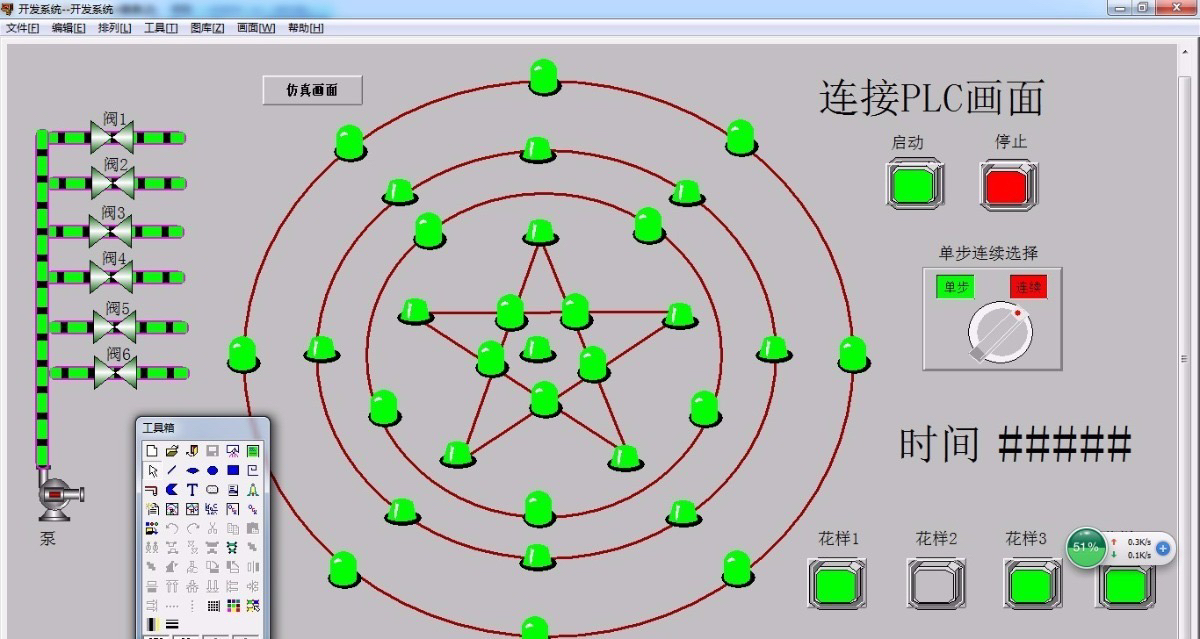
2.5 组态画面设计
组态画面是花样喷泉控制系统的用户界面,直接影响着用户对系统的操作体验。本文基于欧姆龙PLC的组态软件,设计了直观友好的组态画面。用户可以通过该画面实时监测和控制喷泉的状态。
-
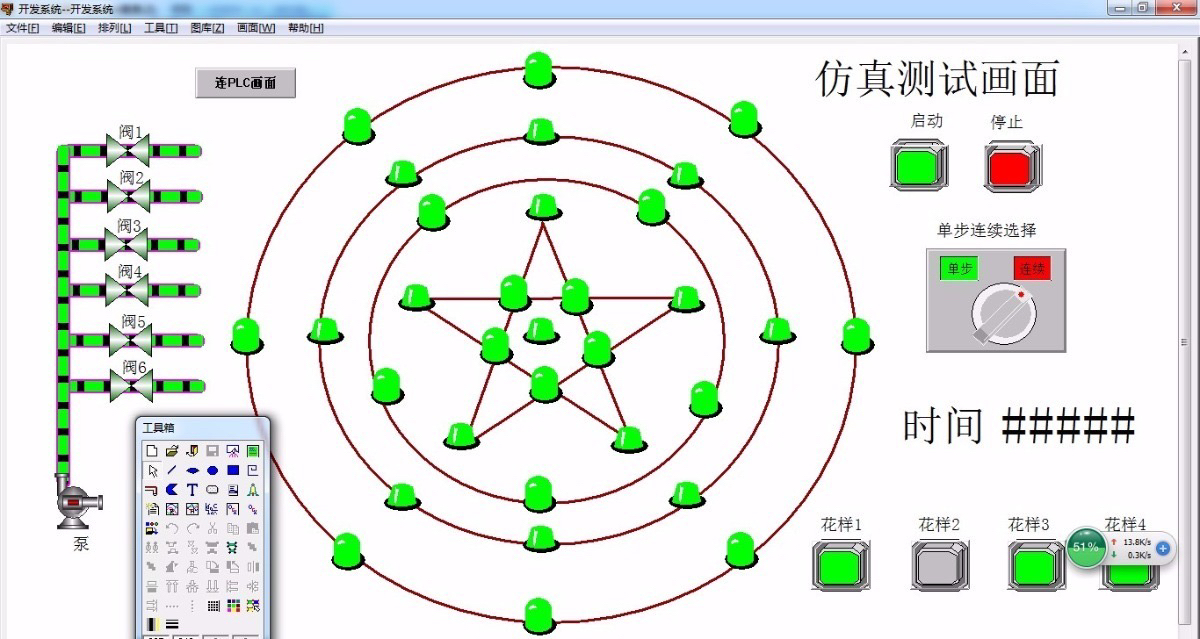
系统实现与效果
本文基于欧姆龙PLC,实现了花样喷泉控制系统的设计与开发。通过实际测试,证明了系统的稳定性和可靠性。同时,控制系统具有灵活的扩展性,用户可以根据自身需求进行系统的功能拓展和升级。 -
结论
本文基于欧姆龙PLC,设计了一套高效可靠的花样喷泉控制系统。通过梯形图程序、接线图、原理图和组态画面的设计与实现,实现了对喷泉的电气控制、音乐匹配等功能。该系统具有稳定性、可靠性和扩展性等优点,为花样喷泉的控制带来了更多的变化和乐趣。
关键词:花样喷泉,控制系统,欧姆龙PLC,梯形图程序,接线图,原理图,组态画面
以上相关代码,程序地址:http://wekup.cn/668773205719.html


















 857
857

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









