






欢迎来到MSS学习的第二弹,这篇就要开始正式的建模仿真啦~
一、建模
1、船舶模型选择
根据需要在 Marine craft models 里面选择适当的船舶模型,我这里选择的是三自由度低速船舶模型中的 CyberShip2 (CS2)。新建一个空白模型,我这里给他命名为MODEL1,把选中的模块直接复制过去。
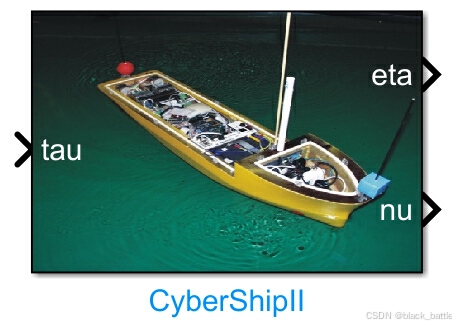
从图中我们看到该模块有一个输入 τ(tau),两个输出 η(eta)和 ν(nu),τ,η和 ν的定义分别为:
τ 为作用在船舶上的广义力:
X:前进方向的力(surge force);
Y:横移方向的力(sway force);
Z:垂直方向的力(heave force);
K:横滚方向的力矩(roll moment);
M:纵倾方向的力矩(pitch moment);
N:偏航方向的力矩(yaw moment);
η 通常表示船舶的姿态(位置和方向),包括六个自由度的运动:
x:前进(surge);
y:横移(sway);
z:垂直(heave);
ϕ:横滚(roll);
θ:纵倾(pitch);
ψ:偏航(yaw);
ν 通常表示船舶在体坐标系下的速度向量,包括线速度和角速度:
u:前进速度(surge velocity);
v:横移速度(sway velocity);
w:垂直速度(heave velocity);
p:横滚角速度(roll rate);
q:纵倾角速度(pitch rate);
r:偏航角速度(yaw rate);
2、控制器选择
这里我选择使用的是动态定位控制器(DP):
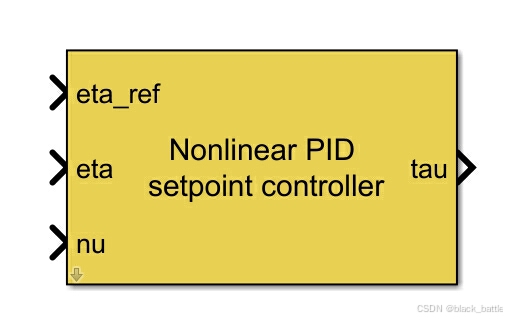
这里多了一个输入通常表示参考位置或参考姿态,这是控制系统期望船舶达到的位置和姿态,用于指导船舶的运动和定位。所以在前一章基本框架基础上,我们还需另加一个模块用来设定参考位置或参考姿态。
3、预估器选择
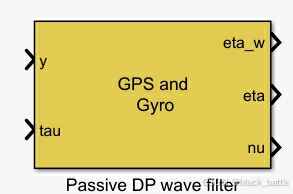
预估器的选择需要和控制器对应起来,前面我们选择的是DP控制器,所以这里我们对应选择Passive DP wave filter(被动DP波浪过滤器)。在DP系统中,波浪过滤器用于处理因海洋波浪引起的高频运动信号,从而提高系统的稳定性和精度。
被动DP波浪过滤器的主要作用是过滤掉由波浪引起的高频干扰,从而使DP系统更能准确地控制船舶的位置和姿态。具体来说,它可以:
(1)减少高频噪声:滤除高频的波浪运动信号,避免其影响DP系统的控制决策;
(2)提高系统稳定性:通过抑制波浪的影响,使系统在应对低频环境干扰时更加稳定;
(3)优化控制响应:减少高频噪声对控制输入的影响,使控制器输出更平滑,更加符合实际控制需求。
新增输入y,这里要与 横移 y 区分开来,这里的y是一个矩阵,其定义为:
:在动态定位系统中,
通常表示由于环境力(风力、波浪等)引起的船舶位置和姿态变化,通常包括三种运动:前进方向变化(
)、横移位置变化(
)和偏航位置变化(
)。这些运动对船舶的稳定性和控制有重要影响,因此在DP系统中需要精确建模和补偿。
4、环境扰动设置
简单起见,我们假设一个无风、无洋流的环境,仅仅考虑波浪的影响,这里选择线性二阶波谱来进行波浪环境模拟:
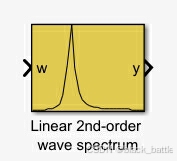
点开该模块,可以看到输入是白噪声,输出为波幅:
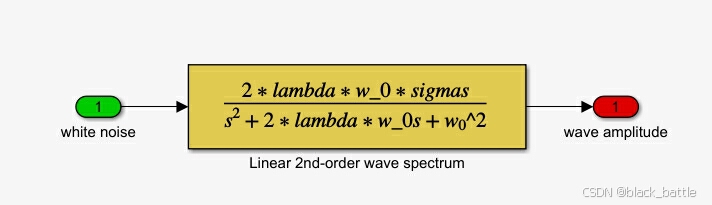
根据手册内容我们知道
其中,K 为恒定可调的增益,该增益 K 必须选择使η中的信号的振幅具有合理的幅度。
Hs(s)是包含波谱s(ω)的线性近似的对角矩阵,其对角线上的元素为二阶波传递函数,如下:
其中
分子为增益参数,其中 σ 是描述波强度的常数,λ 是阻尼系数,
是主导波频率。
一般来说,会有六个传递函数,每个自由度对应一个,这里我们只研究三自由度模型,只需设置前进方向()、横移位置(
)和垂直位置(
)上的变化即可。
w(s)由白噪声模块提供,我们直接在库浏览器中进行搜索:
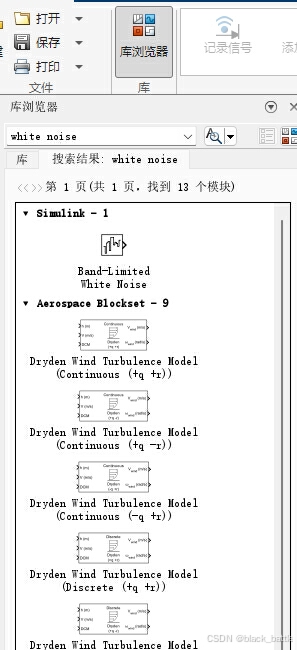
直接添加第一个Band-limited White loise即可,噪声功率可以适当调大,默认为0.1。
二、MaLouDeMingYeShiMing
哈哈哈哈哈哈哈,我要疯了....摸索着学到这里了,师兄让我别用Simulink,我要滚回去看代码了.........哈哈哈哈哈哈哈哈哈,剩下的路你们继续走吧,哈哈哈哈哈哈哈哈哈哈哈......没事哒!没事哒!没!事!哒!


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









