






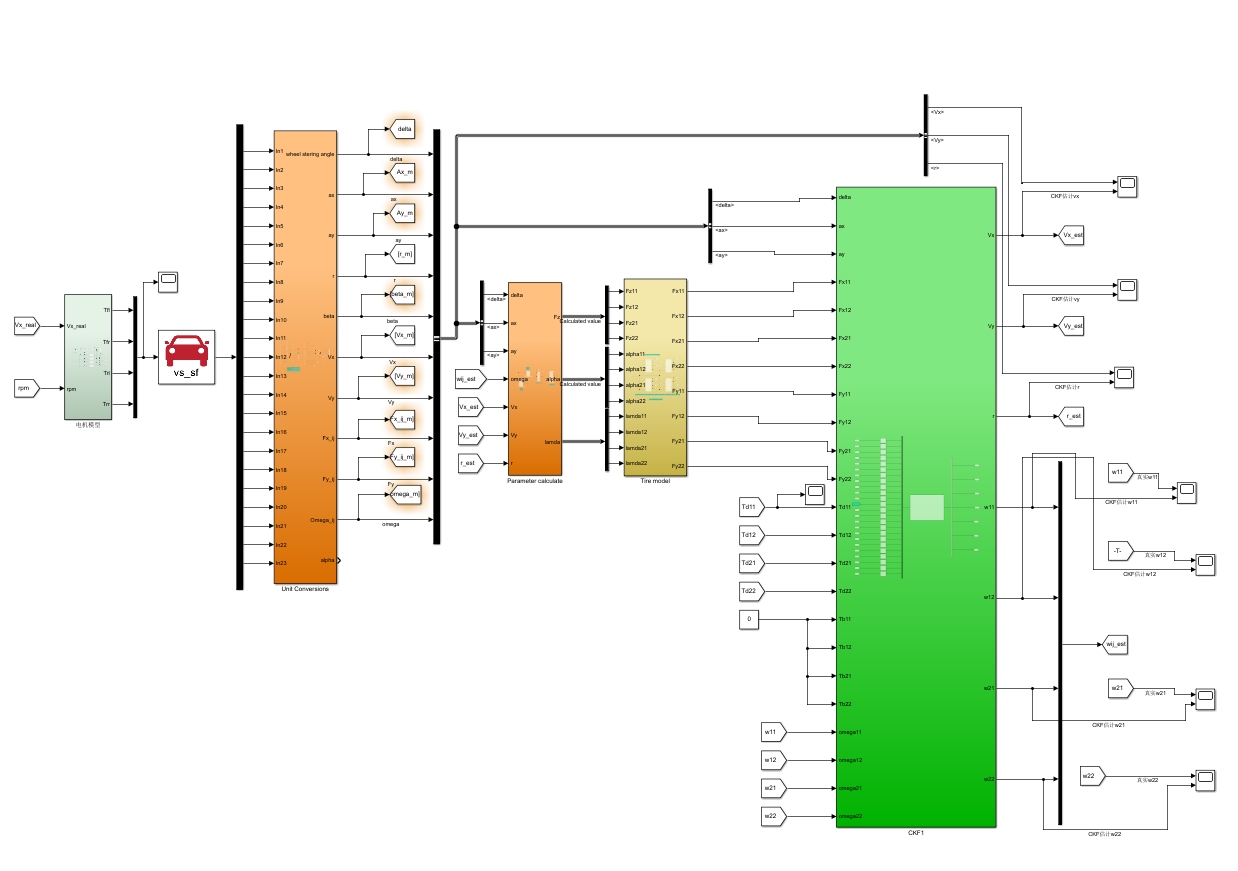
Carsim和simulink联合仿真车辆状态估计
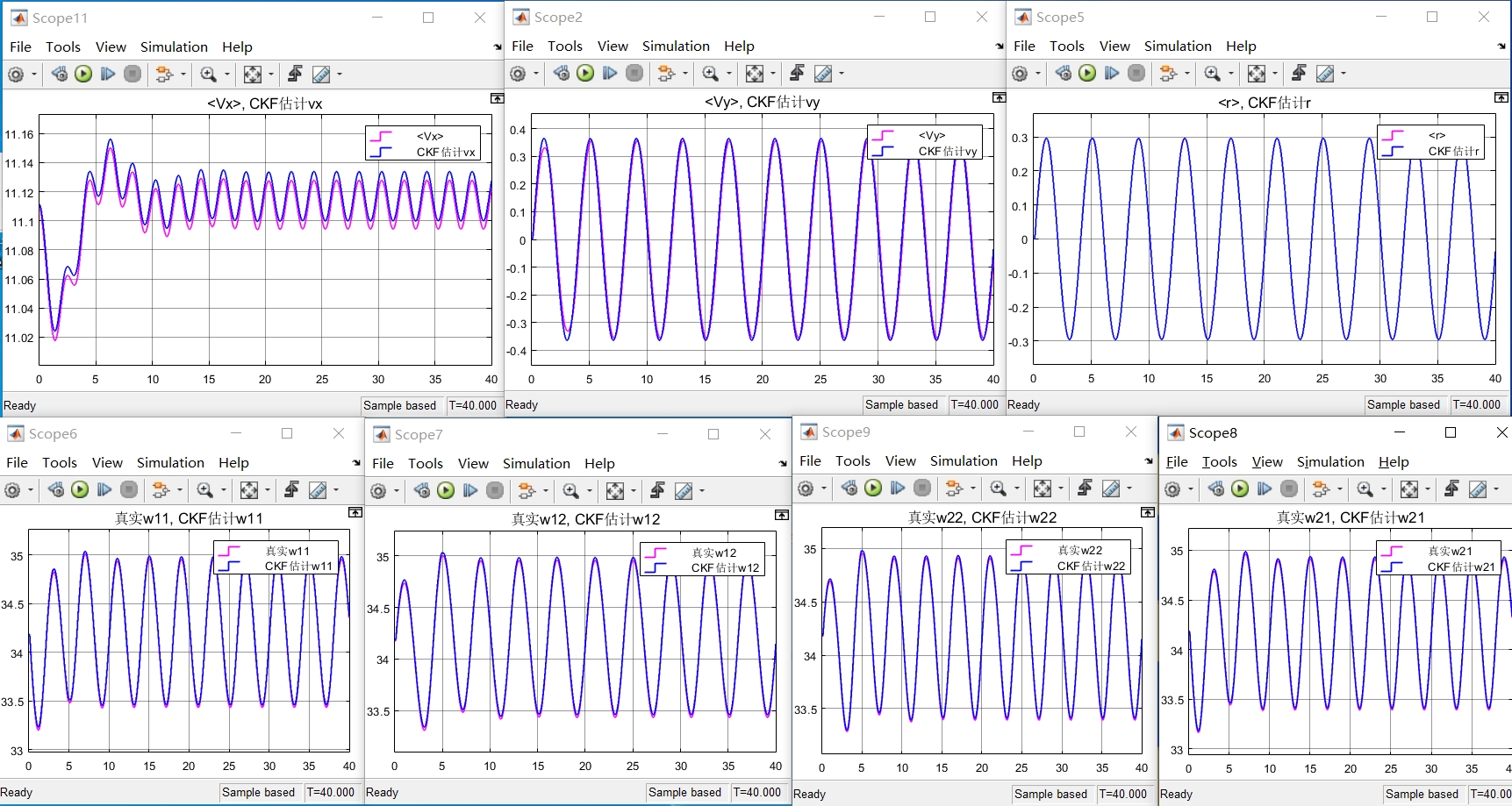
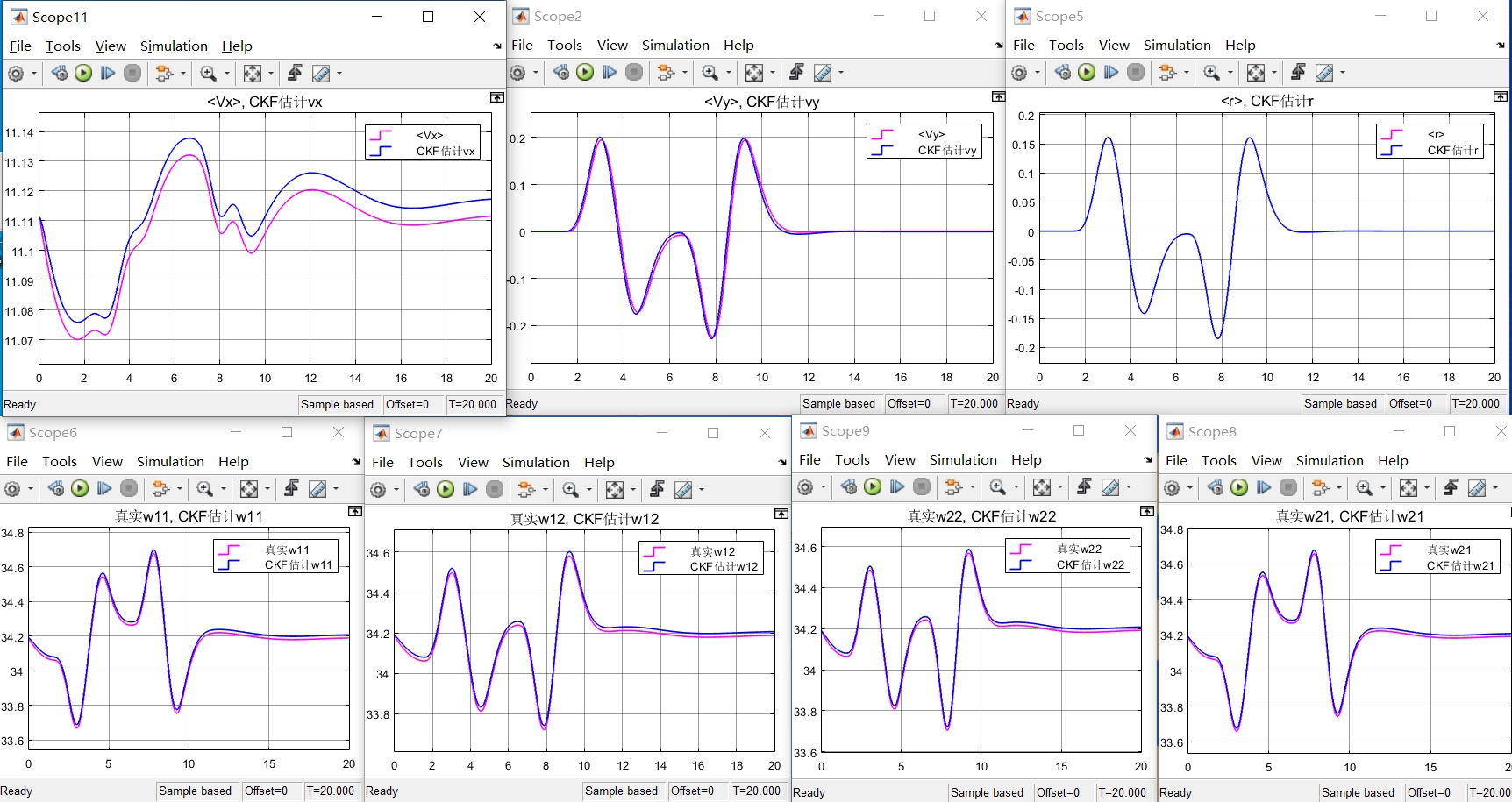
估计的状态为:横摆角速度,质心侧偏角,纵向车速,侧向车速,4个轮子的转动角速度
先基于dugoff轮胎模型进行了轮胎纵向力和侧向力计算,再基于容积卡尔曼滤波CKF或者无迹卡尔曼滤波UKF 进行了车辆状态估计,精度很高,图中的工况为双移线工况和正弦工况
提供模型任何细节的讲解,同时可以交流理论相关的部分,包括卡尔曼滤波算法。
ID:36449678772430101
车辆研究僧
Carsim和Simulink是两个常用的车辆仿真软件,它们可以联合使用以进行车辆状态估计。在车辆状态估计过程中,我们通常关注横摆角速度、质心侧偏角、纵向车速、侧向车速以及每个轮子的转动角速度等指标。
为了计算轮胎的纵向力和侧向力,我们首先采用了dugoff轮胎模型。该模型基于轮胎的结构和力学特性,能够较为准确地估计轮胎在纵向和侧向两个方向上所受的力。通过对轮胎受力进行计算,我们可以得到车辆在动力学方面的一些基本参数,为后续的状态估计提供了重要的输入。
在得到轮胎受力的基础上,我们采用容积卡尔曼滤波(CKF)或者无迹卡尔曼滤波(UKF)来对车辆状态进行估计。卡尔曼滤波是一种递推的状态估计算法,通过融合车辆姿态、车速、轮胎力等多个传感器的信息,可以较为准确地估计车辆的状态。容积卡尔曼滤波是一种基于概率密度的状态估计方法,它能够有效地处理非线性问题。无迹卡尔曼滤波是在容积卡尔曼滤波基础上的改进算法,能够更好地适应非线性系统的状态估计。通过应用这些滤波算法,我们可以在一定程度上消除传感器误差和噪声对估计结果的影响,提高估计的精度和准确性。
在实际应用中,我们对双移线工况和正弦工况进行了仿真实验,以验证所提方法的有效性。通过对这些工况下的车辆状态进行估计,我们可以观察到估计结果与实际状态之间的差异,进而评估所提方法的性能。实验结果表明,基于Carsim和Simulink联合仿真的车辆状态估计方法具有较高的精度和准确性。
除了介绍具体的方法和实验结果,我们还可以就模型的细节进行深入讲解。例如,可以介绍容积卡尔曼滤波和无迹卡尔曼滤波的原理和具体实现方法,进一步加深读者对这些滤波算法的理解。此外,还可以就卡尔曼滤波在其他领域的应用进行讨论,探讨其在车辆控制和导航系统中的潜在应用价值。
总之,Carsim和Simulink联合仿真在车辆状态估计中具有较高的精度和准确性。通过采用dugoff轮胎模型计算轮胎受力,并应用容积卡尔曼滤波或无迹卡尔曼滤波进行状态估计,我们可以获得较为准确的车辆状态信息。这些信息对于车辆控制、导航和安全等方面具有重要的意义,为相关领域的研究和应用提供了有力支持。同时,我们也可以探讨更多与卡尔曼滤波算法相关的理论问题,以促进相关领域的学术交流和研究进展。
相关的代码,程序地址如下:http://matup.cn/678772430101.html
















 1660
1660

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









