







考虑到移植以及灵活性,LevelDB将系统相关的处理(文件/进程/时间)抽象成Evn,用户可以自己实现相应的接口,作为option的一部分传入,默认使用自带的实现。
env.h中声明了:
- 虚基类env,在env_posix.cc中,派生类PosixEnv继承自env类,是LevelDB的默认实现。
- 虚基类WritableFile、SequentialFile、RandomAccessFile,分别是文件的写抽象类,顺序读抽象类和随机读抽象类
- 类Logger,log文件的写入接口,log文件是防止系统异常终止造成数据丢失,是memtable在磁盘的备份
- 类FileLock,为文件上锁
- WriteStringToFile、ReadFileToString、Log三个全局函数,封装了上述接口
下面来看看env_posix.cc中为我们写好的默认实现
顺序读:
class PosixSequentialFile: public SequentialFile {
private:
std::string filename_;
FILE* file_;
public:
PosixSequentialFile(const std::string& fname, FILE* f)
: filename_(fname), file_(f) { }
virtual ~PosixSequentialFile() { fclose(file_); }
// 从文件中读取n个字节存放到 "scratch[0..n-1]", 然后将"scratch[0..n-1]"转化为Slice类型并存放到*result中
// 如果正确读取,则返回OK status,否则返回non-OK status
virtual Status Read(size_t n, Slice* result, char* scratch) {
Status s;
#ifdef BSD
// fread_unlocked doesn't exist on FreeBSD
size_t r = fread(scratch, 1, n, file_);
#else
// size_t fread_unlocked(void *ptr, size_t size, size_t n,FILE *stream);
// ptr:用于接收数据的内存地址
// size:要读的每个数据项的字节数,单位是字节
// n:要读n个数据项,每个数据项size个字节
// stream:输入流
// 返回值:返回实际读取的数据大小
// 因为函数名带了"_unlocked"后缀,所以它不是线程安全的
size_t r = fread_unlocked(scratch, 1, n, file_);
#endif
// Slice的第二个参数要用实际读到的数据大小,因为读到文件尾部,剩下的字节数可能小于n
*result = Slice(scratch, r);
if (r < n) {
if (feof(file_)) {
// We leave status as ok if we hit the end of the file
// 如果r<n,且feof(file_)非零,说明到了文件结尾,什么都不用做,函数结束后会返回OK Status
} else {
// A partial read with an error: return a non-ok status
// 否则返回错误信息
s = Status::IOError(filename_, strerror(errno));
}
}
return s;
}
// 跳过n字节的内容,这并不比读取n字节的内容慢,而且会更快。
// 如果到达了文件尾部,则会停留在文件尾部,并返回OK Status。
// 否则,返回错误信息
virtual Status Skip(uint64_t n) {
// int fseek(FILE *stream, long offset, int origin);
// stream:文件指针
// offset:偏移量,整数表示正向偏移,负数表示负向偏移
// origin:设定从文件的哪里开始偏移, 可能取值为:SEEK_CUR、 SEEK_END 或 SEEK_SET
// SEEK_SET: 文件开头
// SEEK_CUR: 当前位置
// SEEK_END: 文件结尾
// 其中SEEK_SET, SEEK_CUR和SEEK_END和依次为0,1和2.
// 举例:
// fseek(fp, 100L, 0); 把fp指针移动到离文件开头100字节处;
// fseek(fp, 100L, 1); 把fp指针移动到离文件当前位置100字节处;
// fseek(fp, 100L, 2); 把fp指针退回到离文件结尾100字节处。
// 返回值:成功返回0,失败返回非0
if (fseek(file_, n, SEEK_CUR)) {
return Status::IOError(filename_, strerror(errno));
}
return Status::OK();
}
};随机读:
class PosixRandomAccessFile: public RandomAccessFile {
private:
std::string filename_;
int fd_;
mutable boost::mutex mu_;
public:
PosixRandomAccessFile(const std::string& fname, int fd)
: filename_(fname), fd_(fd) { }
virtual ~PosixRandomAccessFile() { close(fd_); }
// 这里与顺序读的同名函数相比,多了一个参数offset,offset用来指定
// 读取位置距离文件起始位置的偏移量,这样就可以实现随机读了。
virtual Status Read(uint64_t offset, size_t n, Slice* result,
char* scratch) const {
Status s;
#ifdef WIN32
// no pread on Windows so we emulate it with a mutex
boost::unique_lock<boost::mutex> lock(mu_);
if (::_lseeki64(fd_, offset, SEEK_SET) == -1L) {
return Status::IOError(filename_, strerror(errno));
}
// int _read(int _FileHandle, void * _DstBuf, unsigned int _MaxCharCount)
// _FileHandle:文件描述符
// _DstBuf:保存读取数据的缓冲区
// _MaxCharCount:读取的字节数
// 返回值:成功返回读取的字节数,出错返回-1并设置errno。
int r = ::_read(fd_, scratch, n);
*result = Slice(scratch, (r < 0) ? 0 : r);
lock.unlock();
#else
// 在非windows系统上使用pread进行随机读,为何此时不用锁呢?详见下文分析
ssize_t r = pread(fd_, scratch, n, static_cast<off_t>(offset));
*result = Slice(scratch, (r < 0) ? 0 : r);
#endif
if (r < 0) {
// An error: return a non-ok status
s = Status::IOError(filename_, strerror(errno));
}
return s;
}
};
可以看到的是,PosixRandomAccessFile 在非windows系统上使用了 pread 来实现原子的定位加访问功能。常规的随机访问文件的过程可以分为两步,fseek (seek) 定位到访问点,调用 fread (read) 来从特定位置开始访问 FILE* (fd)。然而,这两个操作组合在一起并不是原子的,即 fseek 和 fread 之间可能会插入其他线程的文件操作。相比之下 pread 由系统来保证实现原子的定位和读取组合功能。需要注意的是,pread 操作不会更新文件指针。
需要注意的是,在随机读和顺序读中,分别用fd和FILE *来表示一个文件。文件描述符(file descriptor)是系统层的概念, fd 对应于系统打开文件表里面的一个文件;FILE* 是应用层的概念,其包含了应用层操作文件的数据结构。
顺序写:
class BoostFile : public WritableFile {
public:
explicit BoostFile(std::string path) : path_(path), written_(0) {
Open();
}
virtual ~BoostFile() {
Close();
}
private:
void Open() {
// we truncate the file as implemented in env_posix
// trunc:先将文件中原有的内容清空
// out:为输出(写)而打开文件
// binary:以二进制方式打开文件
file_.open(path_.generic_string().c_str(),
std::ios_base::trunc | std::ios_base::out | std::ios_base::binary);
written_ = 0;
}
public:
virtual Status Append(const Slice& data) {
Status result;
file_.write(data.data(), data.size());
if (!file_.good()) {
result = Status::IOError(
path_.generic_string() + " Append", "cannot write");
}
return result;
}
virtual Status Close() {
Status result;
try {
if (file_.is_open()) {
Sync();
// 关闭流时,缓冲区中的数据会自动写入到文件
// 上面调用Sync()强制刷新,是为了确保数据写入,防止数据丢失
file_.close();
}
} catch (const std::exception & e) {
result = Status::IOError(path_.generic_string() + " close", e.what());
}
return result;
}
virtual Status Flush() {
file_.flush();
return Status::OK();
}
// 手动刷新(清空输出缓冲区,并把缓冲区内容同步到文件)
virtual Status Sync() {
Status result;
try {
Flush();
} catch (const std::exception & e) {
result = Status::IOError(path_.string() + " sync", e.what());
}
return result;
}
private:
boost::filesystem::path path_;
boost::uint64_t written_;
std::ofstream file_;
};关于ofstream::flush和ofstream::Close的区别,详见:C++之ofstream::flush与ofstream::close
文件锁:
class BoostFileLock : public FileLock {
public:
boost::interprocess::file_lock fl_;
};virtual Status LockFile(const std::string& fname, FileLock** lock) {
*lock = NULL;
Status result;
try {
if (!boost::filesystem::exists(fname)) {
std::ofstream of(fname, std::ios_base::trunc | std::ios_base::out);
}
assert(boost::filesystem::exists(fname));
boost::interprocess::file_lock fl(fname.c_str());
BoostFileLock * my_lock = new BoostFileLock();
my_lock->fl_ = std::move(fl);
if (my_lock->fl_.try_lock())
*lock = my_lock;
else
result = Status::IOError("acquiring lock " + fname + " failed");
} catch (const std::exception & e) {
result = Status::IOError("lock " + fname, e.what());
}
return result;
} virtual Status UnlockFile(FileLock* lock) {
Status result;
try {
BoostFileLock * my_lock = static_cast<BoostFileLock *>(lock);
my_lock->fl_.unlock();
delete my_lock;
} catch (const std::exception & e) {
result = Status::IOError("unlock", e.what());
}
return result;
}这几个方法都非常简单,比较晦涩的是这句:my_lock->std::move(f1),从函数名来看,是要移动f1。其实std::move是C++11标准库在<utility>中提供的一个有用的函数,这个函数的名字具有迷惑性,因为实际上std::move并不能移动任何东西,它唯一的功能是将一个左值强制转化为右值引用,继而我们可以通过右值引用使用该值,以用于移动语义。从实现上讲,std::move基本等同于一个类型转换:static_cast<T&&>(lvalue);值得一提的是,被转化的左值,其生命期并没有随着左右值的转化而改变。如果读者期望std::move转化的左值变量lvalue能立即被析构,那么肯定会失望了。左值与右值这两概念是从c中传承而来的,在c中,左值指的是既能够出现在等号左边也能出现在等号右边的变量(或表达式),右值指的则是只能出现在等号右边的变量(或表达式)。
计划任务:
PosixEnv还有一个很重要的功能,计划任务,也就是后台的compaction线程。compaction就是压缩合并的意思,在LevelDB源码分析之六:skiplist(2)中也有提到。对于LevelDB来说,写入记录操作很简单,删除记录仅仅写入一个删除标记就算完事,但是读取记录比较复杂,需要在内存以及各个层级文件中依照新鲜程度依次查找,代价很高。为了加快读取速度,LevelDB采取了compaction的方式来对已有的记录进行整理压缩,通过这种方式,来删除掉一些不再有效的KV数据,减小数据规模,减少文件数量等。
PosixEnv中定义了一个任务队列:
struct BGItem { void* arg; void (*function)(void*); };
//用的是deque双端队列作为底层的数据结构
typedef std::deque<BGItem> BGQueue;
BGQueue queue_;
后台进程一直执行queue_中的任务,由于queue_是动态的,自然需要考虑queue_空了怎么办,LevelDB采用的是条件变量boost::condition_variable bgsignal_,队列空了就进入等待,直至有新的任务加入进来。而条件变量一般是要和boost::mutex mu_搭配使用,防止某些逻辑错误。
// BGThread函数的包装,里面调用的就是BGThread函数
static void* BGThreadWrapper(void* arg) {
reinterpret_cast<PosixEnv*>(arg)->BGThread();
return NULL;
}void PosixEnv::Schedule(void (*function)(void*), void* arg) {
boost::unique_lock<boost::mutex> lock(mu_);
// Start background thread if necessary
if (!bgthread_) {
bgthread_.reset(
new boost::thread(boost::bind(&PosixEnv::BGThreadWrapper, this)));
}
// Add to priority queue
// 将任务压进队列中
queue_.push_back(BGItem());
queue_.back().function = function;
queue_.back().arg = arg;
lock.unlock();
bgsignal_.notify_one();
}void PosixEnv::BGThread() {
while (true) {
// 加锁,防止并发冲突
boost::unique_lock<boost::mutex> lock(mu_);
// 如果队列为空,等待,直到收到通知(notification)
while (queue_.empty()) {
bgsignal_.wait(lock);
}
// 从队列头取出任务的函数及其参数
void (*function)(void*) = queue_.front().function;
void* arg = queue_.front().arg;
queue_.pop_front();
lock.unlock();
// 调用函数
(*function)(arg);
}
}EnvWrapper:
在levelDB中还实现了一个EnvWrapper类,该类继承自Env,且只有一个成员函数Env* target_,该类的所有变量都调用Env类相应的成员变量,我们知道,Env是一个抽象类,是不能定义Env 类型的对象的。我们传给EnvWrapper 的构造函数的类型是PosixEnv,所以,最后调用的都是PosixEnv类的成员变量,你可能已经猜到了,这就是设计模式中的代理模式,EnvWrapper只是进行了简单的封装,它的代理了Env的子类PosixEnv。
EnvWrapper和Env与PosixEnv的关系如下:
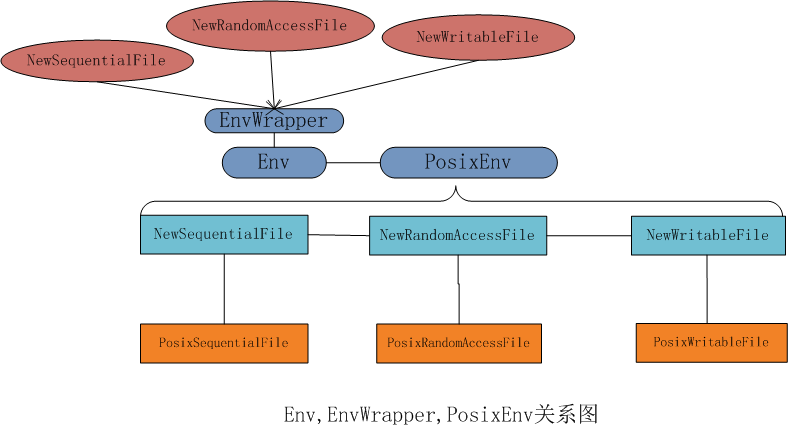
由于篇幅限制,Env中的Logger类就放在后面分析了,参考:LevelDB源码分析之十:LOG文件,从env给我的收获就是:
- 利用虚基类的特性提供了默认的实现,也开放了用户自定义操作的权限
- 面向对象编程范式的学习,把一切操作定义成类
- 文件的加锁解锁,线程的同步
- C的文件流操作,对文件名的字符提取操作,创建、删除文件和路径,这些都可以直接用到将来自己的项目中
















 612
612

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











