








🍊本项目使用Pytorch框架,使用end-end的结构实现COIL20图像分类
🍊神经网络模型可选择LeNet、AlexNet、GoogleNet、VGG16、ResNet50、EfficientNet(Doing)
🍊项目已开源
🍊修改少了参数即可适配读者自己的数据集
🍊网络模型易扩展,可作BaseLine
🍊敲完这6个模型,相当于浅走了一遍CNN的前世今生
🍊最终准确率均达到了100%(COIL20为易数据集)
🍊结合原论文讲解(附论文地址),并适配于COIL20数据集
一、Introduction
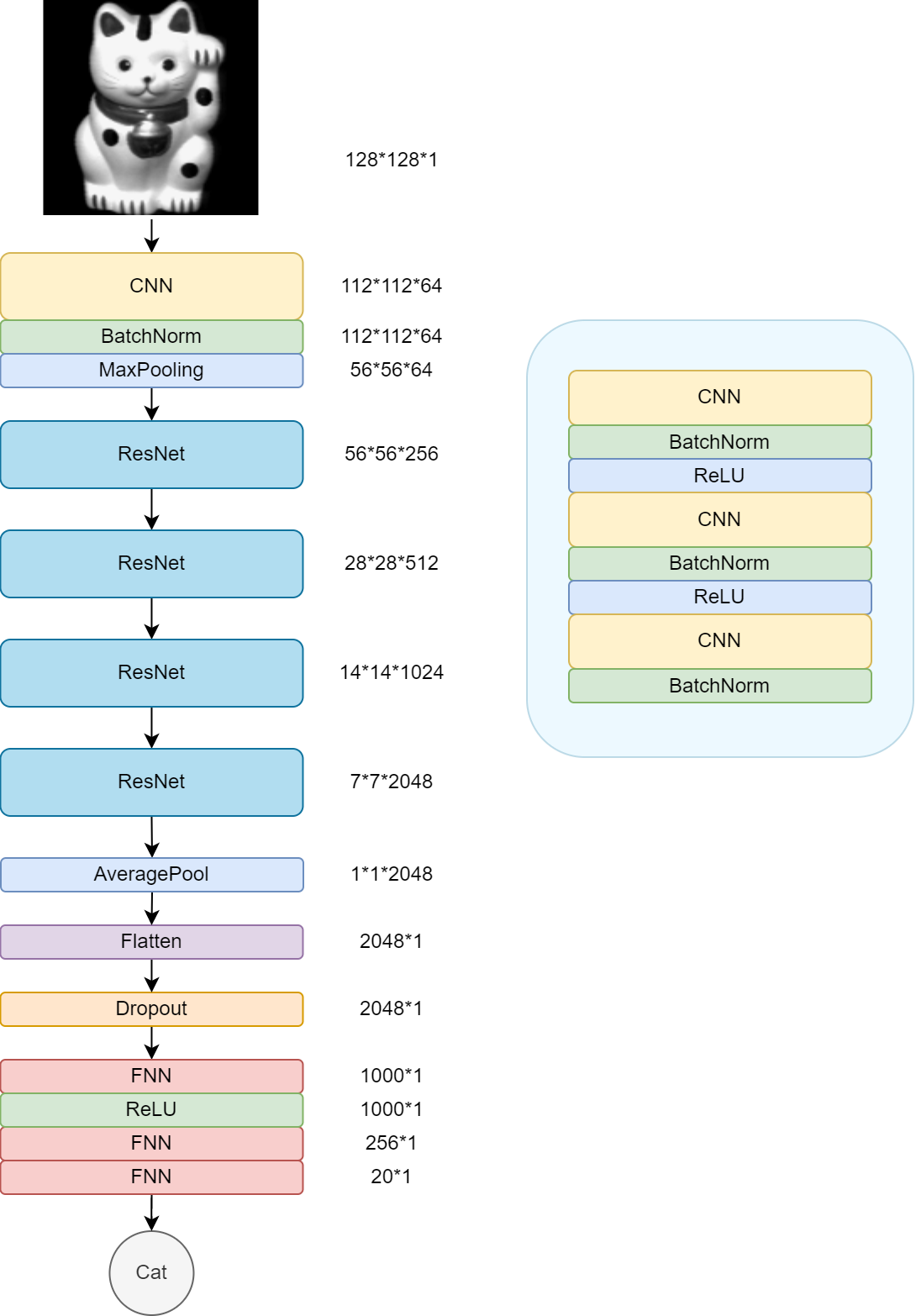
1.1 网络架构图
该网络模型主要使用上游特征提取模型+下游分类器模型组成

1.2 快速使用
该项目已开源在Github上,地址为 Coil20_Image_Classfiation
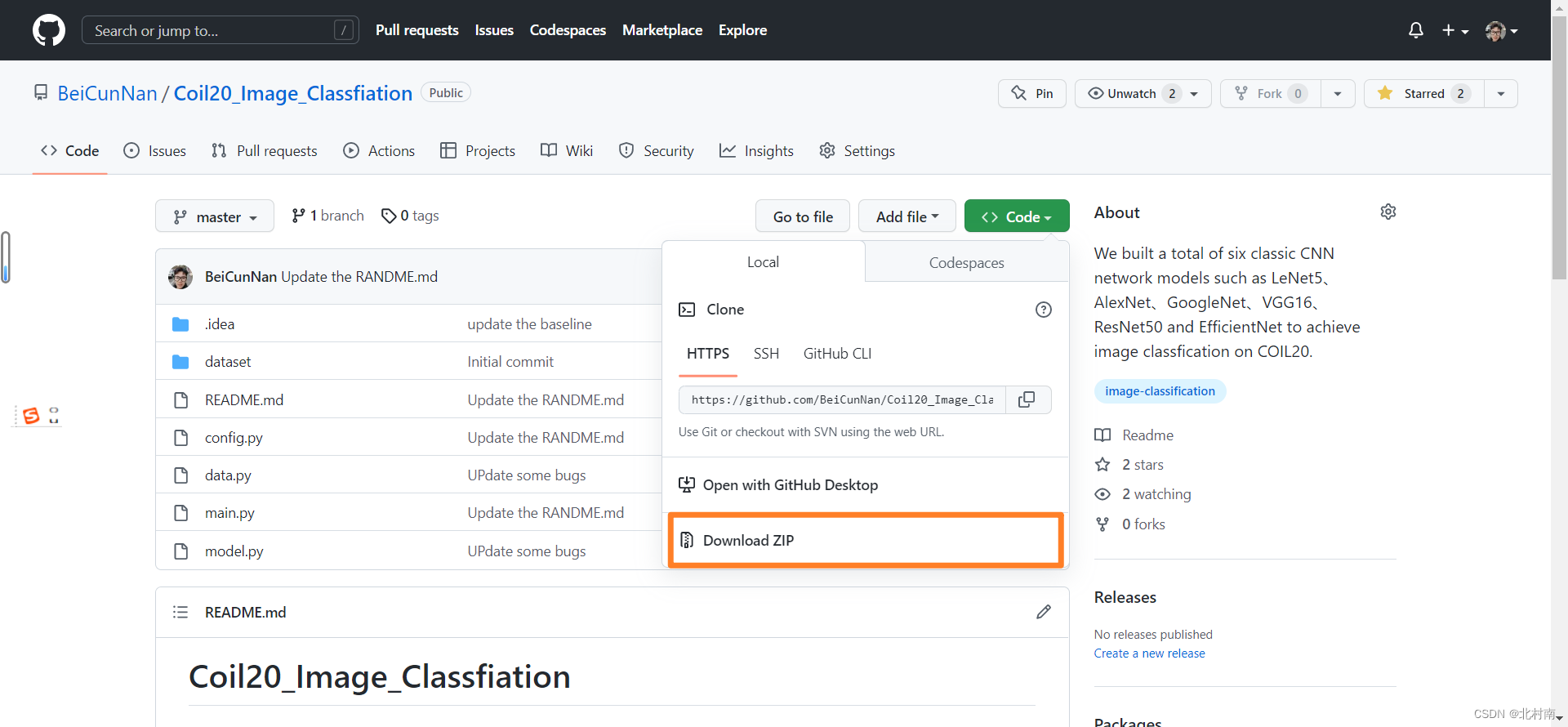
抑或使用Git下载
git cloen https://github.com/BeiCunNan/Coil20_Image_Classfiation.git主要环境要求如下(环境莫过于太老基本没啥问题的)

下载该项目后,配置相对应的环境,在config.py文件中自行选择所需的神经网络模型,如下图所示,最后运行main.py文件即可

1.3 工程结构
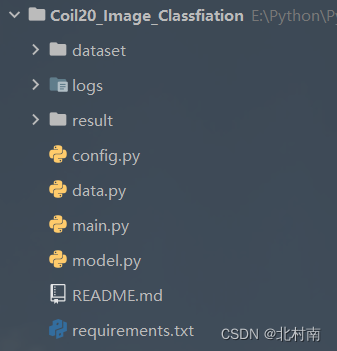
- dataset:数据集
- logs:训练日志
- result:Loss、Acc训练过程图
- config.py:配置文件
- data.py:制作DataSet和DataLoader
- main.py:主函数,负责全流程项目运行,包括模型的训练和测试
- model.py:神经网络模型
1.4 基础知识
如果有小伙伴还不是很懂CNN、Kernal、Stride、Pooling的话,建议先看以下篇文章
二、Config
作者看了很多论文源代码中都使用parser容器进行全局变量的配置,因此也照葫芦画瓢编写了config.py文件
import os
import sys
import time
import torch
import random
import logging
import argparse
from datetime import datetime
def get_config():
parser = argparse.ArgumentParser()
'''Base'''
parser.add_argument('--num_classes', type=int, default=20)
parser.add_argument('--model_name', type=str, default='VGG16',
choices=['LeNet', 'AlexNet', 'GoogleNet', 'VGG16', 'ResNet50', 'EfficientNet'])
'''Optimization'''
parser.add_argument('--train_batch_size', type=int, default=32)
parser.add_argument('--test_batch_size', type=int, default=32)
parser.add_argument('--num_epoch', type=int, default=10)
parser.add_argument('--lr', type=float, default=1e-4)
parser.add_argument('--weight_decay', type=float, default=0.01)
'''Environment'''
parser.add_argument('--device', type=str, default='cuda')
parser.add_argument('--backend', default=False, action='store_true')
parser.add_argument('--workers', type=int, default=0)
parser.add_argument('--timestamp', type=int, default='{:.0f}{:03}'.format(time.time(), random.randint(0, 999)))
parser.add_argument('--index', type=int, default=0)
args = parser.parse_args()
args.device = torch.device(args.device)
'''logger'''
args.log_name = '{}_{}.log'.format(args.model_name, datetime.now().strftime('%Y-%m-%d_%H-%M-%S')[2:])
if not os.path.exists('logs'):
os.mkdir('logs')
logger = logging.getLogger()
logger.setLevel(logging.INFO)
logger.addHandler(logging.StreamHandler(sys.stdout))
logger.addHandler(logging.FileHandler(os.path.join('logs', args.log_name)))
return args, logger
三、Data
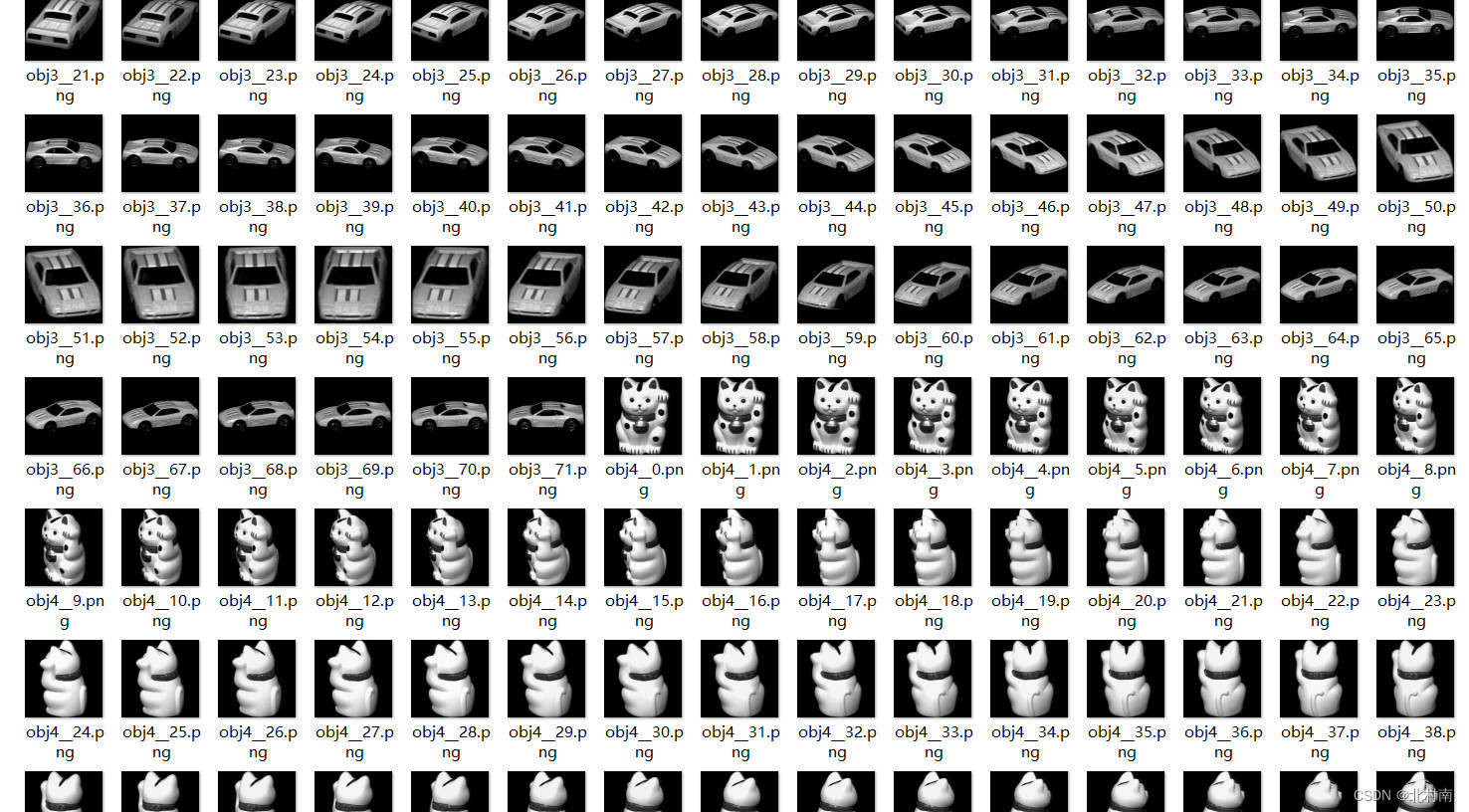
3.1 数据准备
COIL20数据集一共有20种对象,每个对象均有72个样本,因此一共有1440个样本,我们按照9:1来划分训练集和测试集,这里展示部分数据
3.2 制作DataSet
代码细节:使用glob函数来获取所有图片的路径
all_imgs_path = glob.glob(r'dataset\*.png')
for ip in all_imgs_path:
data.append(ip)代码细节:随后使用PIL的Image函数来打开图片,并将其转换成Tensor,最后组合成(图片,标签)来存储到DataSet中
class Mydataset(Dataset):
def __init__(self, images, labels, transform):
self.images = images
self.labels = labels
self.transform = transform
dataset = []
for i in range(len(labels)):
temp_img = Image.open(images[i])
temp_img = self.transform(temp_img)
dataset.append((temp_img, labels[i]))
self.dataset = dataset
def __getitem__(self, index):
return self.dataset[index]
def __len__(self):
return len(self.labels)值得注意的是,这里图片初始化尺寸是可以调整的,因此你可以在此修改来适配您自己的数据集,比如自己的数据集为64*64,就改为transformers.Resieze((64,64))
transform = transforms.Compose([
transforms.Resize((128, 128)),
transforms.ToTensor()
])3.3 制作DataLoader
tr_loader = DataLoader(tr_set, batch_size=self.args.train_batch_size, shuffle=True, num_workers=self.args.workers,
pin_memory=True)
te_loader = DataLoader(te_set, batch_size=self.args.train_batch_size, shuffle=True, num_workers=self.args.workers,
pin_memory=True)四、Model
4.1 Overview
让我们先看看CNN的发展历史,以下的模型讲解也是按照发展历史来
| 模型 | 时间 | 贡献 |
| LeNet | 1998 |
|
| AlexNet | 2012 |
|
| GoogLeNet | 2014 |
|
| VGG16 | 2014 |
|
| ResNet | 2018 |
|
| EfficientNet | 2020 |
|
4.2 CNN calculation formula
在看网络模型之前,还是值得提一提CNN中卷积的计算公式,如此可更好理解后面的网络模型
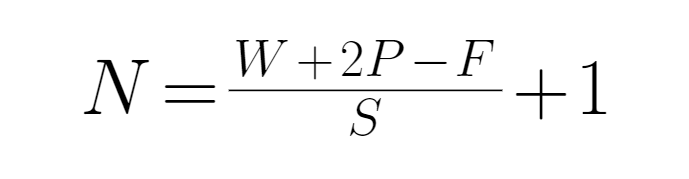
N:输出图片边长
W:输入图片边长
F:kernel大小
S:stride步长
P:padding补缺数量
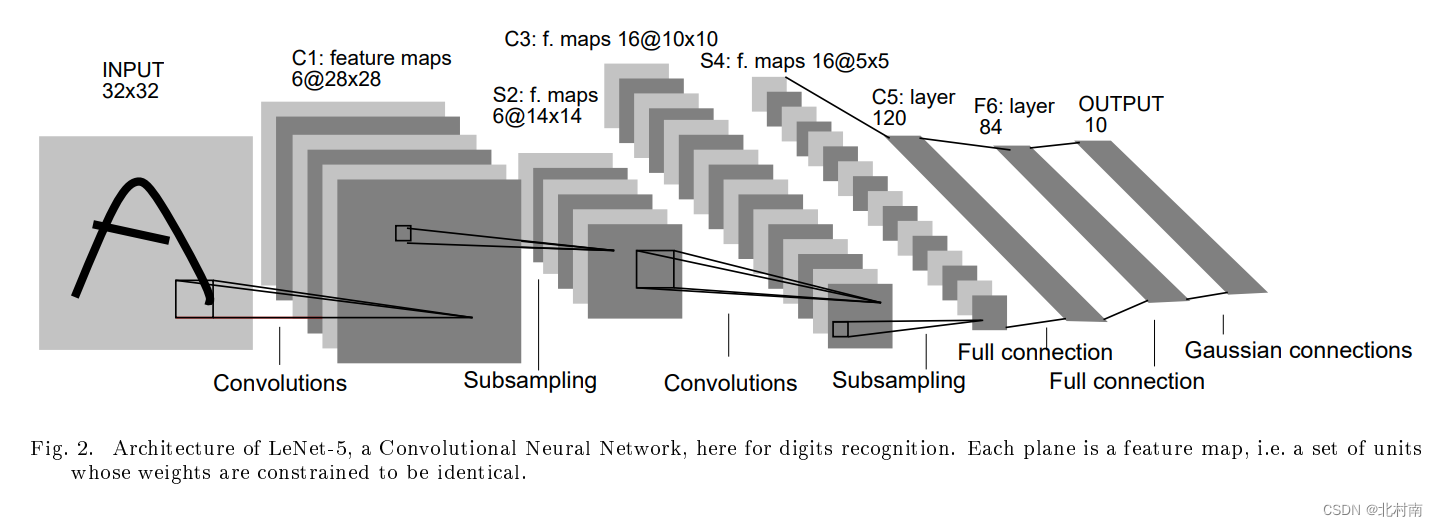
4.3 LeNet 1998
论文地址《Gradient-Based Learning Applied to Document Recognition》
原始网络结构
使用CNN+Sigmoid串行组合来进行特征提取,最后使用Flatten+FNN进行分类预测
适配网络结构
- 根据自己图像尺寸修改第一个CNN
- 加入了Dropout层使模型的鲁棒性更好

代码
class LeNet(torch.nn.Module):
def __init__(self):
super(LeNet, self).__init__()
self.convs = nn.Sequential(
nn.Conv2d(1, 10, 10, 2),
nn.Sigmoid(),
nn.MaxPool2d(2, 2),
nn.Conv2d(10, 20, 5),
nn.Sigmoid(),
nn.MaxPool2d(2, 2),
nn.Conv2d(20, 20, 4),
nn.Sigmoid(),
nn.MaxPool2d(2, 2),
nn.Conv2d(20, 20, 3, 1, 1),
nn.Sigmoid(),
)
self.fc = nn.Sequential(
nn.Dropout(0.5),
nn.Linear(5 * 5 * 20, 100),
nn.Sigmoid(),
nn.Linear(100, 60),
nn.Sigmoid(),
nn.Linear(60, 20)
)
def forward(self, x):
batch_size = x.size(0)
x = self.convs(x)
x = x.view(batch_size, -1)
x = self.fc(x)
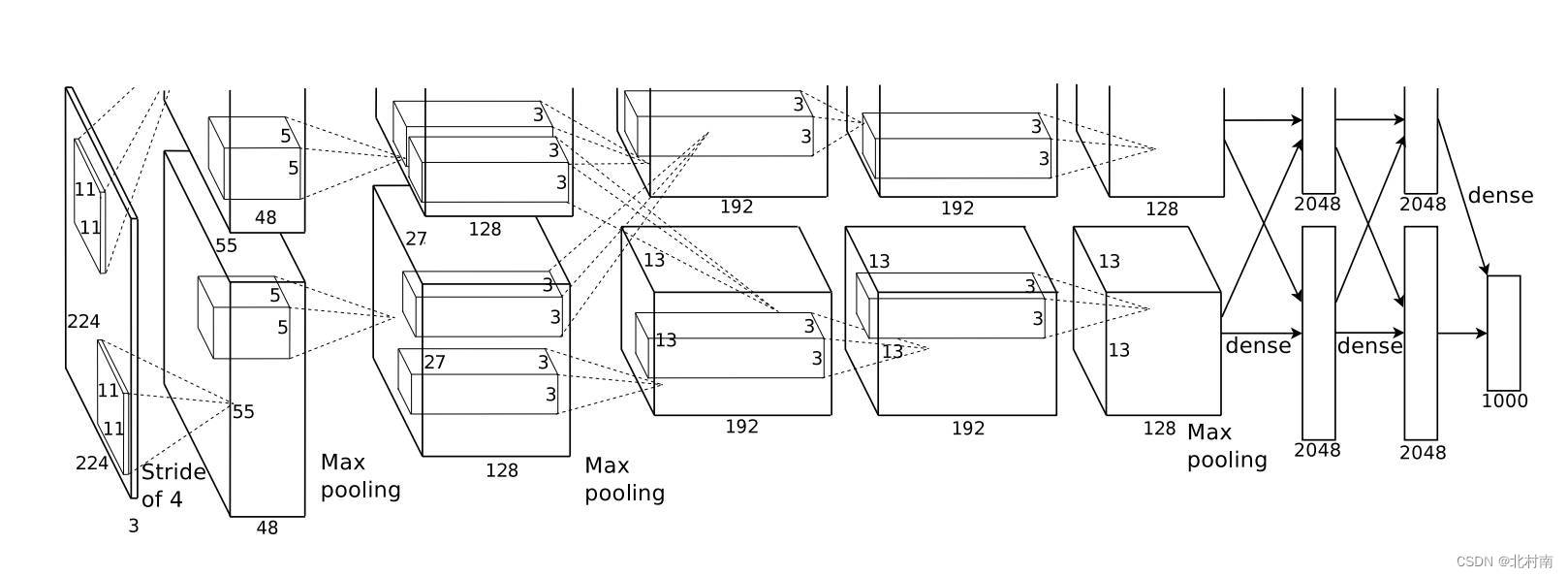
return x4.4 AlexNet 2012
论文地址《ImageNet Classifification with Deep Convolutional Neural Networks》
原始网络结构
使用CNN+ReLu串行组合来进行特征提取,最后使用Dropout+Flatten+FNN进行分类预测
适配网络结构
- 根据自己图像尺寸修改第一个CNN
- 双层模型改为单层模型
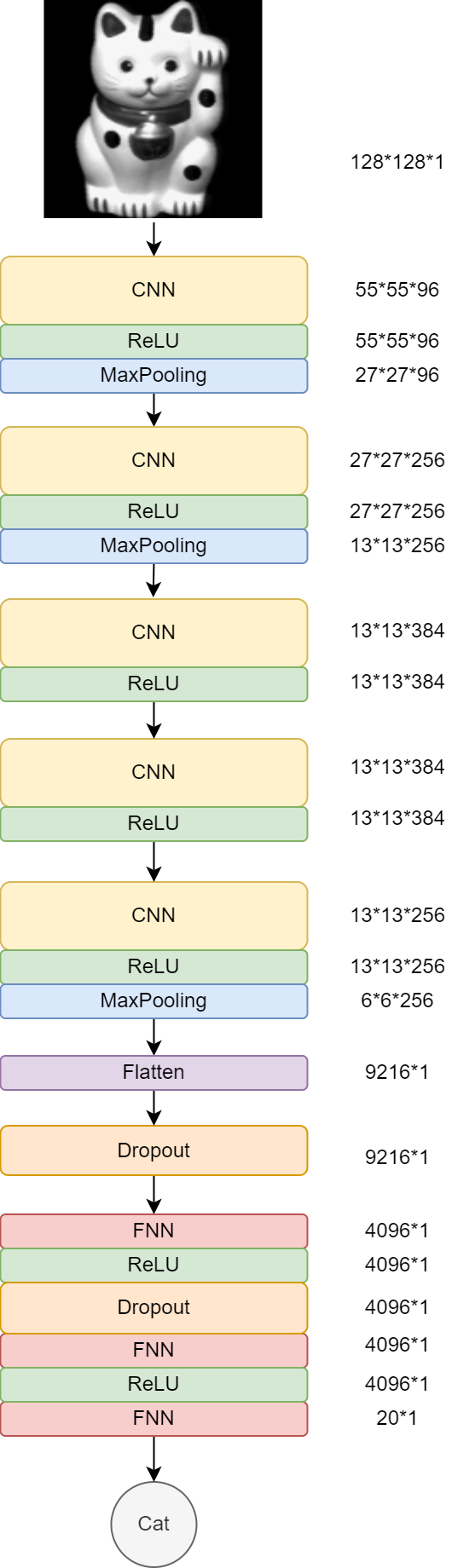
代码
class AlexNet(torch.nn.Module):
def __init__(self):
super(AlexNet, self).__init__()
self.convs = nn.Sequential(
nn.Conv2d(in_channels=1, out_channels=96, kernel_size=20, stride=2),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(in_channels=96, out_channels=256, kernel_size=5, stride=1, padding=2),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(in_channels=256, out_channels=384, kernel_size=3, stride=1, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=384, out_channels=384, kernel_size=3, stride=1, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=384, out_channels=256, kernel_size=3, stride=1, padding=1),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2)
)
self.fc = nn.Sequential(
nn.Dropout(0.5),
nn.Linear(in_features=256 * 6 * 6, out_features=4096),
nn.ReLU(inplace=True),
nn.Dropout(0.5),
nn.Linear(in_features=4096, out_features=4096),
nn.ReLU(inplace=True),
nn.Linear(in_features=4096, out_features=20)
)
def forward(self, x):
batch_size = x.size(0)
x = self.convs(x)
x = x.view(batch_size, -1)
x = self.fc(x)
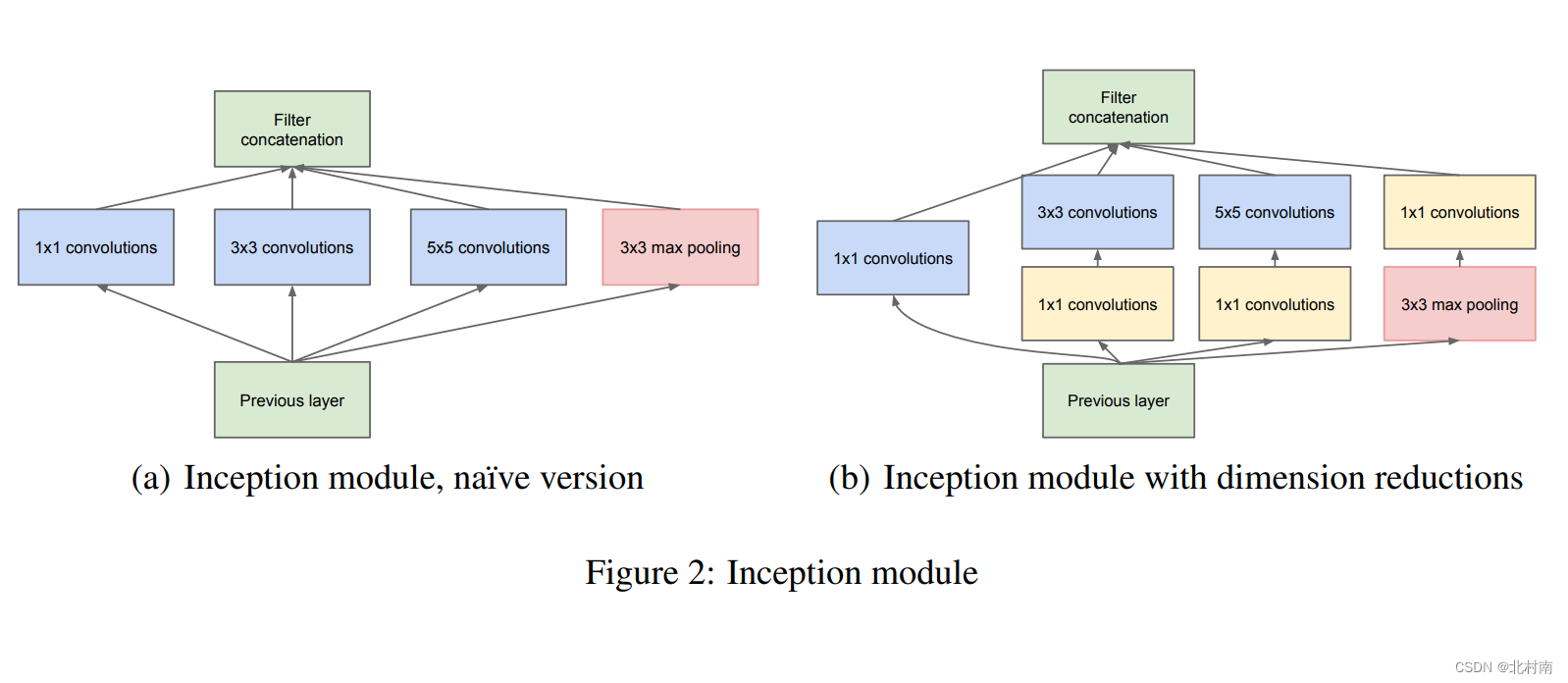
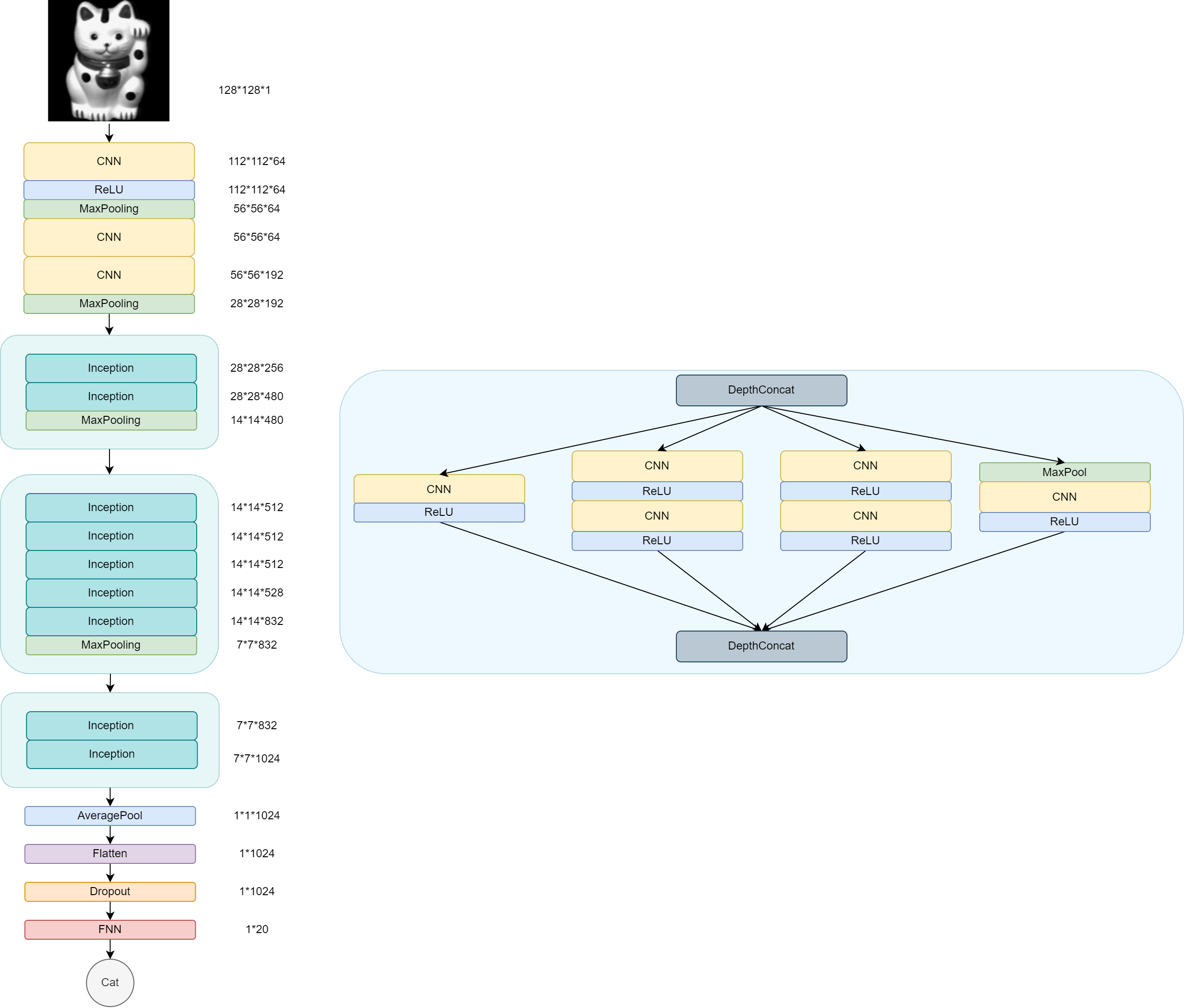
return x4.5 GoogLeNet 2014
论文地址《Going deeper with convolutions》
原始网络结构
GoogLeNet主要是由9个称之为Inception的模块堆叠而成,每个Inception的模块如下图(b)所示,即从一个Layer中分出4个小CNN模块,最后将4个小CNN模块进行拼接组合。
关于为什么要怎么做,作者的理解是其实在CNN中一直有个困扰大家的问题,即Kernal的尺寸和深度到底要怎么选?粗鲁的做法是,如果不知道怎么选那我们将所有的可能性都先列出来,即下方的1*1、3*3、5*5的Kernal,然后使用类似机器学习中的Soft-Voting做法来给每个小CNN模块一个权重。
除此之外,这个做法和2018年RestNet的做法又有异曲同工之妙,ResNet在下面4.7中会介绍,读者可先看完GoogLeNet和ResNet网络之后再思考此问题。
为什么说异曲同工之妙呢,因此残差机制的直观理解就是可以恒等映射,跳过几个效果不好的CNN来提高深度,在这里,我们使用了1*1的Kernal,其实也可以认为是恒等映射,我们极端的讲好了,如果3*3、5*5的卷积效果都不好,那网络都给他们权重都是0好了,那自然这4个小CNN模块只有1*1的CNN模块有效了,若这个1*1的CNN权重参数均为1,那就是完全的恒等映射了。
除此之外,GoogLeNet的最终的分类预测也很有意思,它没有使用传统的Flatten,而是使用AveragePooling,据原论文报道使用该方法后模型的Acc可以提高1个点左右,当然最后还是使用了一个FNN,这是为了便于下游任务的Fine Tuning
其网络模块的参数如下

适配网络结构
- 根据自己图像尺寸修改第一个CNN
代码
每个CNN都加上一个ReLU激活函数
class BasicConv2d(nn.Module):
def __init__(self, in_channels, out_channels, **kwargs):
super(BasicConv2d, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, **kwargs)
self.relu = nn.ReLU(inplace=True)
def forward(self, x):
x = self.conv(x)
x = self.relu(x)
return xInception模块
class Inception(nn.Module):
def __init__(self, in_channels, ch1x1, ch3x3red, ch3x3, ch5x5red, ch5x5, pool_proj):
super(Inception, self).__init__()
self.branch1 = BasicConv2d(in_channels, ch1x1, kernel_size=1)
self.branch2 = nn.Sequential(
BasicConv2d(in_channels, ch3x3red, kernel_size=1),
BasicConv2d(ch3x3red, ch3x3, kernel_size=3, padding=1)
)
self.branch3 = nn.Sequential(
BasicConv2d(in_channels, ch5x5red, kernel_size=1),
BasicConv2d(ch5x5red, ch5x5, kernel_size=5, padding=2)
)
self.branch4 = nn.Sequential(
nn.MaxPool2d(kernel_size=3, stride=1, padding=1),
BasicConv2d(in_channels, pool_proj, kernel_size=1)
)
def forward(self, x):
branch1 = self.branch1(x)
branch2 = self.branch2(x)
branch3 = self.branch3(x)
branch4 = self.branch4(x)
outputs = [branch1, branch2, branch3, branch4]
return torch.cat(outputs, 1)主体模型
class GoogleNet(nn.Module):
def __init__(self):
super(GoogleNet, self).__init__()
self.inputs = nn.Sequential(nn.Conv2d(in_channels=1, out_channels=64, kernel_size=17),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1),
nn.Conv2d(64, 64, kernel_size=1),
nn.Conv2d(64, 192, kernel_size=3, padding=1),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
self.block1 = nn.Sequential(
Inception(192, 64, 96, 128, 16, 32, 32),
Inception(256, 128, 128, 192, 32, 96, 64),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
)
self.block2 = nn.Sequential(Inception(480, 192, 96, 208, 16, 48, 64),
Inception(512, 160, 112, 224, 24, 64, 64),
Inception(512, 128, 128, 256, 24, 64, 64),
Inception(512, 112, 144, 288, 32, 64, 64),
Inception(528, 256, 160, 320, 32, 128, 128),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
)
self.block3 = nn.Sequential(
Inception(832, 256, 160, 320, 32, 128, 128),
Inception(832, 384, 192, 384, 48, 128, 128),
)
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.outputs = nn.Sequential(
nn.Dropout(0.5),
nn.Linear(1024, 20)
)
def forward(self, x):
batch_size = x.size(0)
x = self.inputs(x)
x = self.block1(x)
x = self.block2(x)
x = self.block3(x)
x = self.avgpool(x)
x = x.view(batch_size, -1)
x = self.outputs(x)
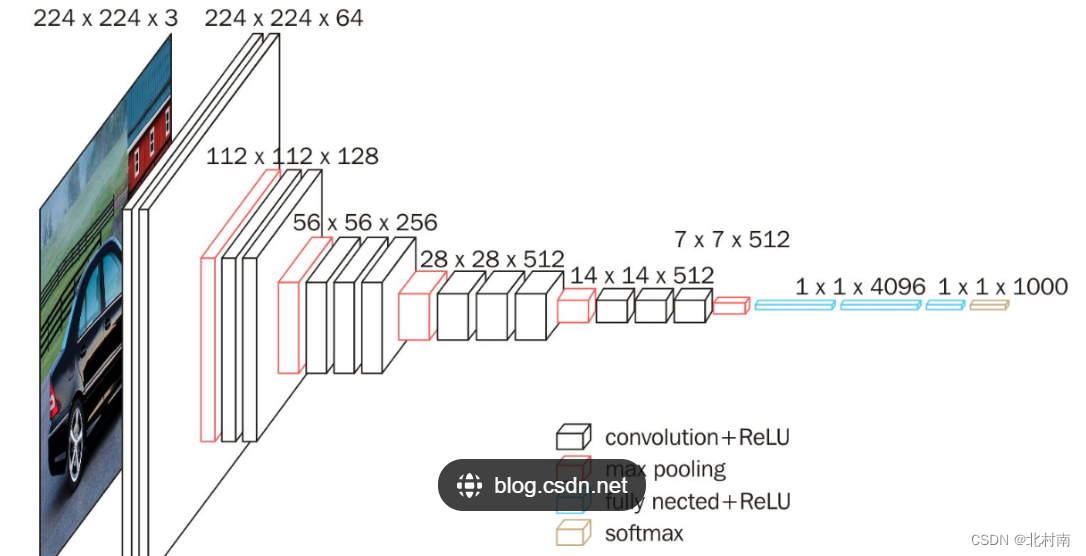
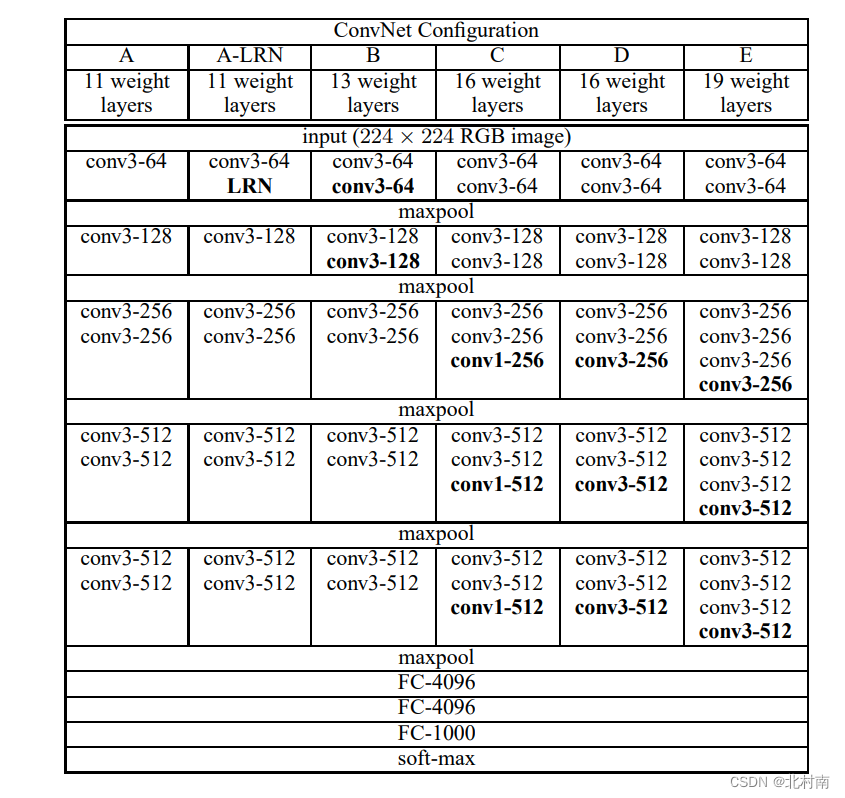
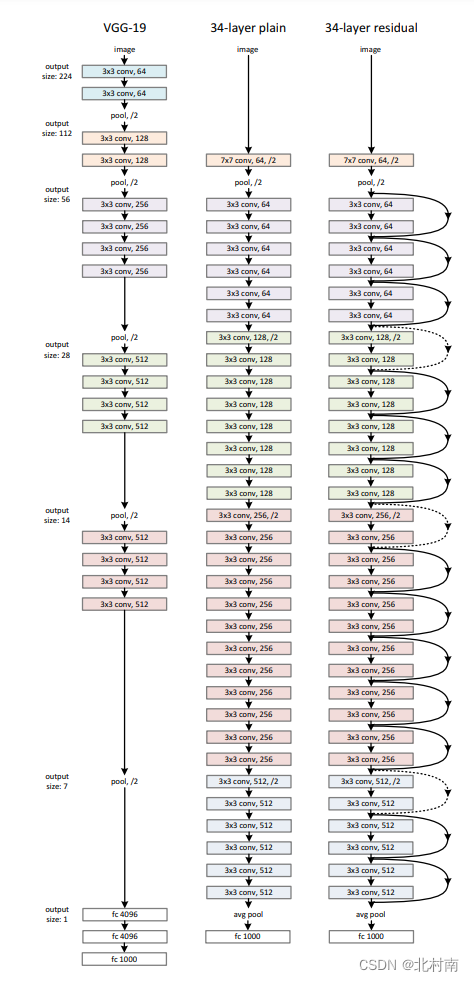
return x4.6 VGG16 2014
论文地址《Very deep convolutional networks for large-scaleimage recognition》
原始网络结构
只使用最简单的3*3的Kernal和Pool进行串行组合,同时使用Padding技术使得图像经过Kernal大小保持不变,从而可以在保持图像大小不变的情况下深度挖掘图像中的信息
适配网络结构
- 根据自己图像尺寸修改第一个CNN
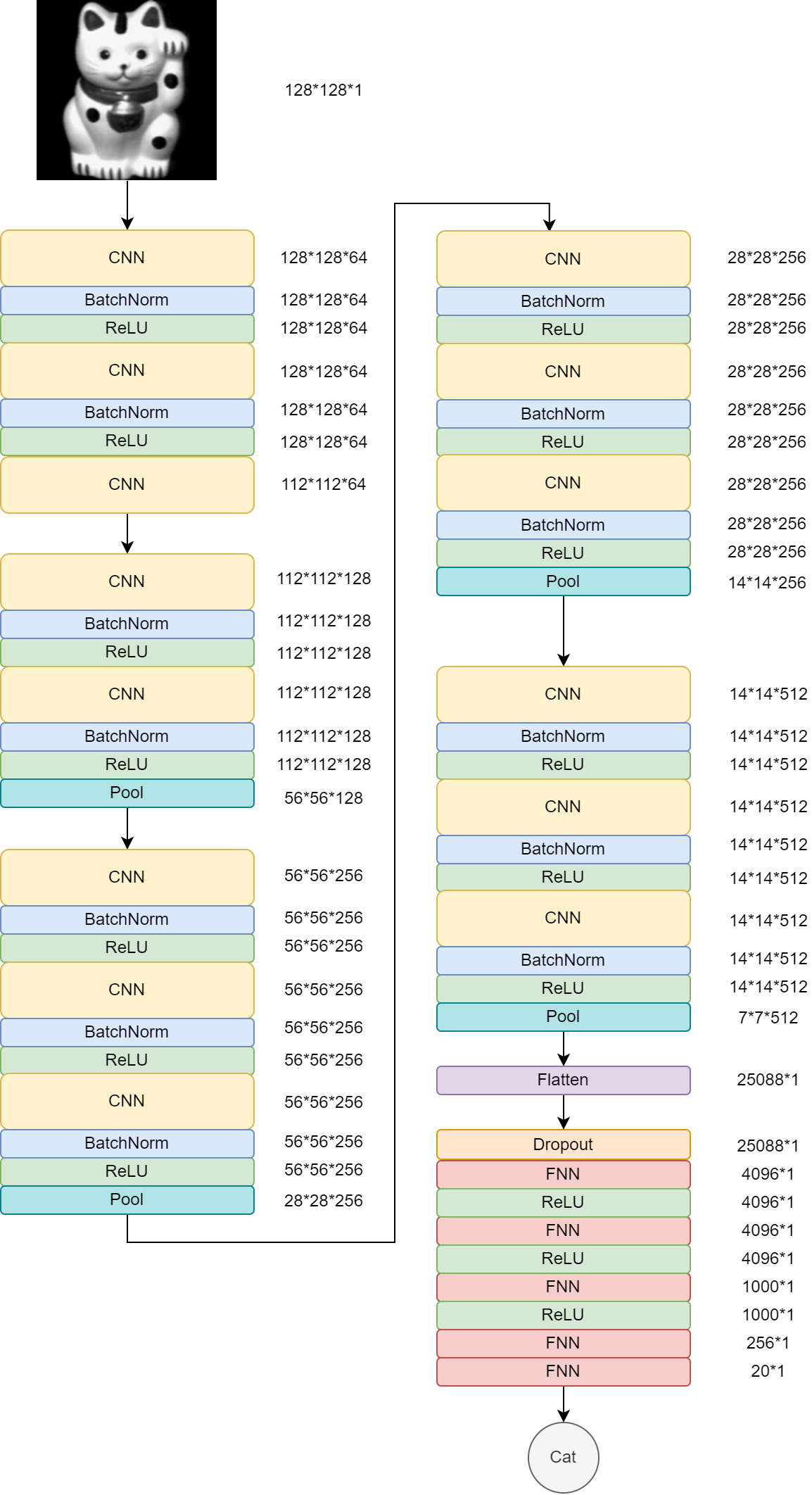
在代码部分我们放入了BatchNorm进行Batch归一化处理,这使得数据在进行Relu之前不会因为数据过大而导致网络性能的不稳定,BatchNorm2d()函数数学原理如下:

代码
class VGG16(torch.nn.Module):
def __init__(self):
super(VGG16, self).__init__()
self.block1 = nn.Sequential(
nn.Conv2d(in_channels=1, out_channels=64, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=64, out_channels=64, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=64, out_channels=64, kernel_size=17)
)
self.block2 = nn.Sequential(
nn.Conv2d(in_channels=64, out_channels=128, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=128, out_channels=128, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.MaxPool2d(2, 2)
)
self.block3 = nn.Sequential(
nn.Conv2d(in_channels=128, out_channels=256, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(256),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=256, out_channels=256, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(256),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=256, out_channels=256, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(256),
nn.ReLU(inplace=True),
nn.MaxPool2d(2, 2)
)
self.block4 = nn.Sequential(
nn.Conv2d(in_channels=256, out_channels=512, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=512, out_channels=512, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=512, out_channels=512, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.MaxPool2d(2, 2)
)
self.block5 = nn.Sequential(
nn.Conv2d(in_channels=512, out_channels=512, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=512, out_channels=512, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=512, out_channels=512, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.MaxPool2d(2, 2)
)
self.convs = nn.Sequential(
self.block1,
self.block2,
self.block3,
self.block4,
self.block5
)
self.fnn = nn.Sequential(
nn.Dropout(0.5),
nn.Linear(25088, 4096),
nn.ReLU(inplace=True),
nn.Linear(4096, 4096),
nn.ReLU(inplace=True),
nn.Linear(4096, 1000),
nn.ReLU(inplace=True),
nn.Linear(1000, 256),
nn.Linear(256, 20),
)
def forward(self, x):
batch_size = x.size(0)
x = self.convs(x),
x = x[0]
x = x.view(batch_size, -1)
x = self.fnn(x)
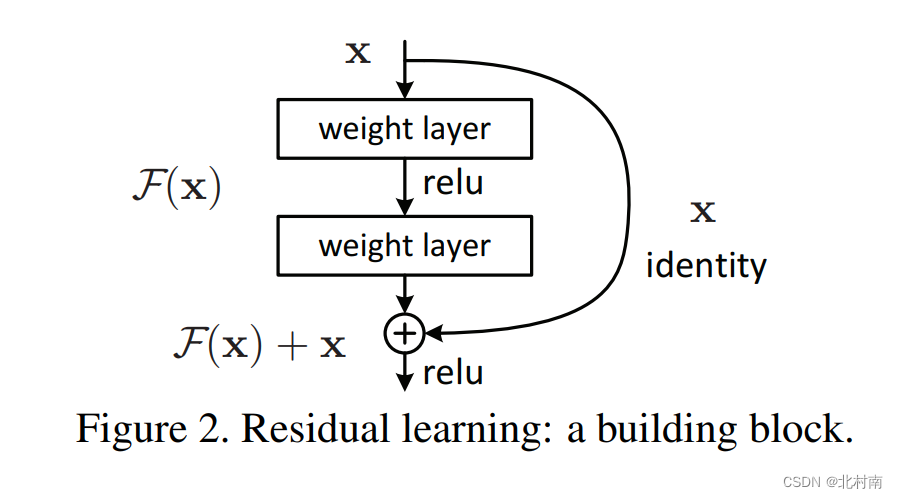
return x4.7 ResNet 2018
论文地址《Deep Residual Learning for Image Recognition》
原始网络结构
原始论文中的两层残差块叫做Shortcut connection,用于最原始的ResNet18和ResNet34
而这里我们使用的是Rest50,其残差块有三层,称之为Bottleneck,中间一层为3*3的Kernal,而两侧是1*1的Kernal,1*1的Kernal主要是用来改变channels大小(在RestNet中是将channels乘4)
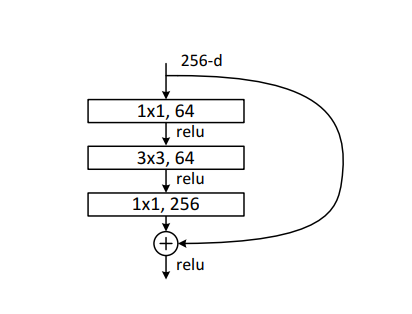
几个Bottleneck组合成一个Block,在ReNet50中一共有4个Block,各个Block含有的Bottleneck的数量分别为3,4,3,6
在每个Block的第一个Bottleneck的输入和输出会组合成Shortcut connection,即残差就是体现在这里
适配网络结构
- 根据自己图像尺寸修改第一个CNN
代码
残差块设计
class Bottleneck(nn.Module):
def __init__(self, in_channels, out_channels, stride=None, padding=None, first=False):
super(Bottleneck, self).__init__()
if stride is None:
stride = [1, 1, 1]
if padding is None:
padding = [0, 1, 0]
self.bottleneck = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride[0], padding=padding[0], ),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True),
nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=stride[1], padding=padding[1]),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True),
nn.Conv2d(out_channels, out_channels * 4, kernel_size=1, stride=stride[2], padding=padding[2]),
nn.BatchNorm2d(out_channels * 4)
)
if (first):
self.res = nn.Sequential(
nn.Conv2d(in_channels, out_channels * 4, kernel_size=1, stride=stride[1]),
nn.BatchNorm2d(out_channels * 4)
)
else:
self.res = nn.Sequential()
def forward(self, x):
out = self.bottleneck(x)
out += self.res(x)
out = F.relu(out)
return out总体结构
class ResNet50(nn.Module):
def __init__(self):
super(ResNet50, self).__init__()
self.in_channels = 64
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.conv1 = nn.Sequential(
nn.Conv2d(1, 64, kernel_size=17),
nn.BatchNorm2d(64),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
) # --> 3,4,3,6
self.conv2 = self._make_layer(Bottleneck, [[1, 1, 1]] * 3, [[0, 1, 0]] * 3, 64)
self.conv3 = self._make_layer(Bottleneck, [[1, 2, 1]] + [[1, 1, 1]] * 3, [[0, 1, 0]] * 4, 128)
self.conv4 = self._make_layer(Bottleneck, [[1, 2, 1]] + [[1, 1, 1]] * 5, [[0, 1, 0]] * 6, 256)
self.conv5 = self._make_layer(Bottleneck, [[1, 2, 1]] + [[1, 1, 1]] * 2, [[0, 1, 0]] * 3, 512)
self.convs = nn.Sequential(
self.conv1,
self.conv2,
self.conv3,
self.conv4,
self.conv5
)
self.fnn = nn.Sequential(
nn.Dropout(0.5),
nn.Linear(2048, 1000),
nn.ReLU(inplace=True),
nn.Linear(1000, 256),
nn.Linear(256, 20),
)
def _make_layer(self, Bottleneck, strides, paddings, out_channels):
layers = []
flag = True
for i in range(len(strides)):
layers.append(Bottleneck(self.in_channels, out_channels, strides[i], paddings[i], first=flag))
flag = False
self.in_channels = out_channels * 4
return nn.Sequential(*layers)
def forward(self, x):
batch_size = x.size(0)
x = self.convs(x)
x = self.avgpool(x)
x = x.view(batch_size, -1)
x = self.fnn(x)
return x4.8 (Doing)EfficientNet 2020
论文地址《EffificientNet: Rethinking Model Scaling for Convolutional Neural Networks》
网络架构
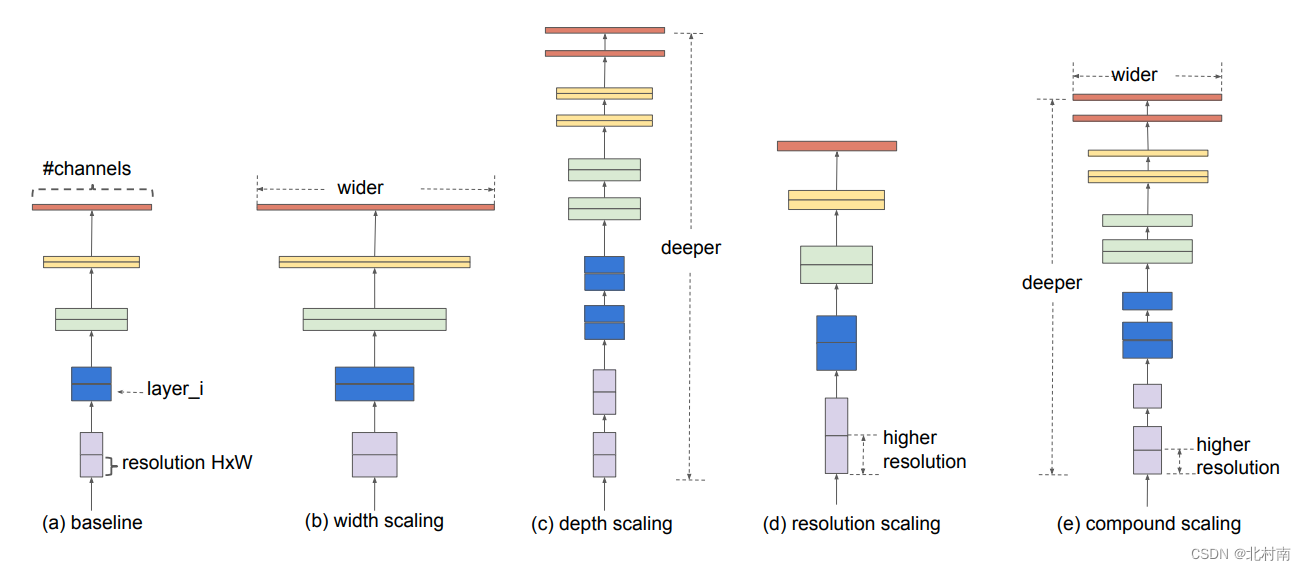
This module is being worked on。。。
五、Train and Test
训练函数
注意要开启训练模式,即self.Mymodel.train()
def _train(self, dataloader, criterion, optimizer):
self.args.index += 1
train_loss, n_correct, n_train = 0, 0, 0
# Turn on the train mode
self.Mymodel.train()
for inputs, targets in tqdm(dataloader, disable=self.args.backend, ascii='>='):
inputs, targets = inputs.to(self.args.device), targets.to(self.args.device)
predicts = self.Mymodel(inputs)
loss = criterion(predicts, targets)
optimizer.zero_grad()
loss.backward()
optimizer.step()
# You can check the predicts for the last epoch
# if (self.args.index > 9):
# print(torch.argmax(predicts, dim=1))
train_loss += loss.item() * targets.size(0)
n_correct += (torch.argmax(predicts, dim=1) == targets).sum().item()
n_train += targets.size(0)
return train_loss / n_train, n_correct / n_train测试函数
注意要开启验证模式,即self.Mymodel.eval()
def _test(self, dataloader, criterion):
test_loss, n_correct, n_test = 0, 0, 0
# Turn on the eval mode
self.Mymodel.eval()
with torch.no_grad():
for inputs, targets in tqdm(dataloader, disable=self.args.backend, ascii=' >='):
inputs, targets = inputs.to(self.args.device), targets.to(self.args.device)
predicts = self.Mymodel(inputs)
loss = criterion(predicts, targets)
test_loss += loss.item() * targets.size(0)
n_correct += (torch.argmax(predicts, dim=1) == targets).sum().item()
n_test += targets.size(0)
return test_loss / n_test, n_correct / n_test六、Result
又到了最快乐的炼丹时间,看看效果怎么样
强大的模型+简单的数据集,使训练结果均为100%

分析
- 一开始使用LeNet的时候发现Acc一直在4%上不去,估计是学习率的问题,于是将学习率调大,但还是用了接近200EPOCH才实现不错的效果
- 由于我们改写了LeNet,使其也有Dropout,由此可视LeNet和AlexNet区别于激活函数的差异,两模型可视为激活函数的消融实验,最终ReLU属实较Sigmoid更优
七、Conclusion
- 牢抓CNN的计算公式,网络模块便易理解
- 从搭建LeNet用最简单的CNN+SigMoid至后来的CNN+Pooling+ReLU+Dropout+BatchNorm+ResNet+Inception +EfficientNet,浅层的见证了CV的发展史
- 通过搭建这5个经典的模型,可以快速上手CV的内容,适合新手入门
八、Reference
《神经网络与与深度学习》邱锡鹏
《Going deeper with convolutions》Google Inc
《EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks》Google AI
《ImageNet Classification with Deep Convolutional Neural Networks》Toronto University
《Gradient-Based Learning Applied to Document Recognition》LeCun
《VERY DEEP CONVOLUTIONAL NETWORKS FOR LARGE-SCALE IMAGE RECOGNITION》 Oxford University
《Deep Residual Learning for Image Recognition》Microsoft Research
最后,本文若有一些问题抑或大家有新的想法和需求,欢迎在评论区留言讨论🥰🥰🥰
















 948
948











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











