







Pixhawk copter固件的默认参数是为3DR QUAD COPTER设计的。如果你想获得一个最佳的飞行表现的话。你需要对一些参数做一些调整。调整的参数主要是Extended Tuning下面的Roll和Pitch的PID,来获得稳定的姿态。
在copter的参数调整里边比较重要的参数主要是Roll、Pitch、yaw、Altitude hold、loiter、和waypoint navigation 的调整。
在上面的几个参数里边最重也是最基本的就是Roll/Pitch的调整。通常情况下在调整Roll/Pitch的PID的时候最好是在stabilize 模式下进行调整,在获得满意的飞行姿态以后再切换到Alt hold模式下继续调整,然后是Loiter模式下进行调整,最后才是在AUTO模式下进行航线飞行调整。
Roll/Pitch的调整
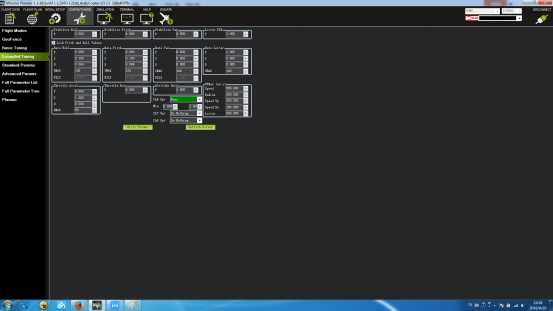
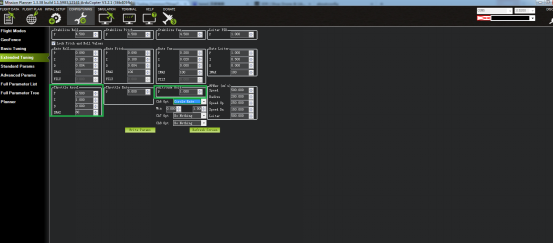
Roll/Pitch主要是调整stabilize Roll/Pitch 和Rate Roll/Pitch 的调整。下图中黄色凸显的区域。
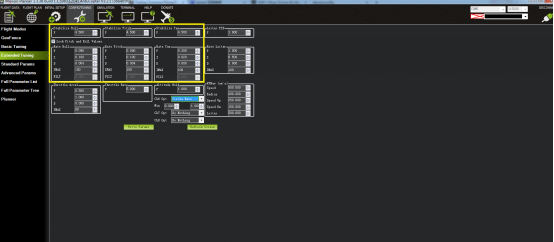
stabilize Roll/Pitch 的P值是将期望的角度转换为一个期望的旋转值,然后送给Rate Roll/Pitch控制器。(注意:较大的p值会导致飞行器对控制输入非常敏感,过小会导致飞行器动作迟钝,过大则会导致RaRoll/Pitch轴的振荡。)
Rate Roll/Pitc的P值是将期望的旋转速率转化为电机的输出。(通俗的讲也就是响应的速度?)
如何客观的评价Roll/Pitch的PID是不是合理?其中一个方法就是用log工具分析log重的ATT消息。如图所示
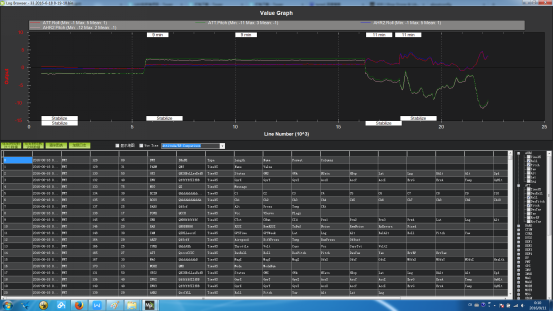
对比ATT消息中Roll和Roll in以及Pitch和Pitch in的曲线,通常来说在stabilize 模式下,理论上Roll的曲线应该和Roll in的曲线非常的相似。或者如果你想同时调整Roll/Pitch的stabilize和pitch得PID值,那么你可以使用自动调参功能。(这个功能后续再讲,敬请关注……)
Yaw的调整
Yaw需要最多的调整,调整内容在图中红色凸显的区域。
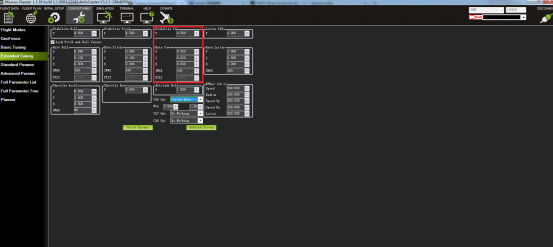
和Roll/Pitch一样无论是stabilize yaw或者rate yaw的值,只要有一个过高都会导致航向的振荡。
其中ACRO_YAW_P参数控制了飞行器对操控人员的输入控制的响应。默认值为4.5,也就是当摇杆完全打到左边或者右边的时候,飞行器会以每秒钟200度的速率旋转,值过大会导致旋转速率很快,让飞行器翻跟头。
Altitude Tuning 定高模式调整
Altitude Tuning的调整参数为绿色凸显的区域。
The Altitude hold参数是将高度误差转化为爬升或者下降的期望加速度。增大这个值会试飞行器急剧的尝试维持他的高度,值过大会导致油门振荡。(油门忽大忽小)
The Throttle Rate是将把加速度的误差转化为电机的输出。如果你要修改这个参数,那么应该维持P和I的比率为1:2,通常情况下这个参数不需要调整,但是对于一些动力非常强劲的飞行器最好把这个值减小50%。
Loiter Tuning悬停模式调整
通常如果Roll/Pitch的参数合理,GPS,COMPASS的设置正确,而且状态良好的情况下,这个模式一般不需要过多的调整,更详细的调整如悬停模式下水平方向的速度修正涉及到其他的一些参数,这个后面再讲……。
单个参数在线调试
单个参数的调整可以通过遥控的第6通道来进行调整。但是使用这个方式时要注意设置合适的参数取值区间。这个具体的讲解详见单个参数在线调试这篇文章。















 7104
7104
09-10

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









