







影像几何校正:(image-image)
参考实例:
在4.1 节中曾指出恢复投影变形的关键就是要找到原始图像与失真(变形)图像之间的关系s(xo, Yo)和t(xo. Yo) , 一旦变换关系s 和t 已知,就可以根据式4-]1和式4-2 将原图像J{xo, Yo)中的每一点映射到失真图像g(xlyl) 中,从而通过我们熟悉的拷贝对应像素的方式获得f 中像素点的取值。然而在实践中, s(xo, Yo)和t(功, Yo)井非易事。首先一些较为复杂的几何失真是很难通过几个解析式来描述,即我们很难对这样的失真过程建模。此外,即便是已经找到了用千描述几何失真的合理模型,如何确定该模型的参数将是又一个棘手的问题。
对于本节将要讨论的投影变形,我们已经有了合适的解析式来描述,即通过下面的双线性方程来建模:

式4-9 和式4-10 中总共有8 个参数, C1, C2, …,C8. 。如果能够找到4 对儿对应点(基准点),就能够建立8 个方程,解出c1 到c8 这8 个参数,从而确定映射关系s(x0,y0)和t(x0, y0) 。为此,
我们必须至少知道4 个原图像中的点在投影失真的图像中被映射到的对应位置。有多种不同的技术用千建立基准点对儿, 一些图像生成系统存在物理的人为缺陷,如金属点,镶嵌在图像传感器上。这就产生了一个已知的点集,在获取的图像中这些点的位置是容易得到的。再比如说对千图4.21 中的汽车牌照图像,在其二值化图像中用霍夫变换(参见第9 章)检测出四边形的边框线,根据边框线的交点确定四边形的4 个顶点作为基准点将是
一个不错的选择。在基准影像选择四个点:
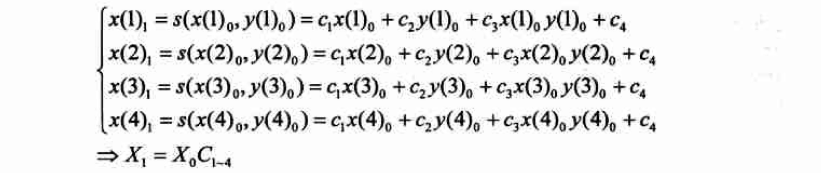
从而可以解出前4 个变换参数:
⇒ c1~c4
类似的可以解出后四个变换参数:
⇒ c5~c8
参考书籍:数字图像处理与机器视觉
function re = image2image(image1,image2)
[selectedMovingPoints,selectedFixedPoints] = cpselect(image2,image1,'Wait',true);
X0=selectedFixedPoints(1:4,2);
Y0=selectedFixedPoints(1:4,1);
X1=selectedMovingPoints(1:4,2);
Y1=selectedMovingPoints(1:4,1);
a=ones(4,1);
X1=[X1 Y1 X1.*Y1 a];
Y1=X1;
C1=X1\X0;
C2=Y1\Y0;
[minx1,maxx1,miny1,maxy1]=findedge(image2,C1,C2);%计算图像边界大小
[m1,n1]=size(image1);
[m2,n2]=size(image2);
Minx=min([minx1,0]);
Miny=min([miny1,0]);
Maxx=max([maxx1,m1]);
Maxy=max([maxy1,n1]);
%求整个图像大小
M=Maxx-Minx;
N=Maxy-Miny;
re=ones(M,N)*255;
re(2-Minx:m1-Minx+1,2-Miny:n1-Miny+1)=image1(:,:);
for x=1:m2
for y=1:n2
X=[x y x.*y 1]*C1;X=ceil(X);
Y=[x y x.*y 1]*C2;Y=ceil(Y);
if (image2(x,y)~=0&&isinf(image2(x,y))==0)
re(X-Minx+1,Y-Miny+1)=image2(x,y);
end
end
end
end
function [minx,maxx,miny,maxy]=findedge(image,C1,C2)
minx=0;miny=0;maxx=0;maxy=0;
[m,n]=size(image);
for x=1:m
for y=1:n
X=[x y x.*y 1]*C1;X=round(X);
Y=[x y x.*y 1]*C2;Y=round(Y);
if X<minx
minx=X;
elseif X>maxx
maxx=X;
end
if Y<miny
miny=Y;
elseif Y>maxy
maxy=Y;
end
end
end
end
运行测试截图:
基准影像:

变形影像:

选点过程:

结果:

总结记录:前期出错在于把获取坐标搞反了,一直做出来的校正影像都有很大问题。
(后续进行提高精度,完善代码)
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











