







✅博主简介:本人擅长建模仿真、程序设计、论文写作与指导,项目与课题经验交流。项目合作可私信或扫描文章底部二维码。
运动控制算法需适应更广泛的工况范围。然而,现有的非线性模型预测控制(NMPC)算法面临着一些挑战,特别是在车辆运动控制模型的设计上,单一的模型往往适用范围窄,无法覆盖全速工况。为此,本文提出了一种整合车辆运动学与动力学的综合模型(Integrated Kinematic and Dynamic Model,IKD),旨在扩大单一车辆运动控制模型的适用工况范围。
IKD模型的提出与分析
IKD模型通过结合车辆的运动学特性和动力学特性来进行设计,旨在提供更全面的运动描述。该模型不仅考虑了车辆的基本运动学特性,例如位置、速度和加速度,还整合了动力学因素,如质心位置、重心高度和转向特性等。在模型精度和复杂度之间进行了权衡,重点分析了横向和纵向动力学之间的耦合关系。针对动力学耦合较弱的部分,我们对模型进行了简化,从而提高了计算效率。
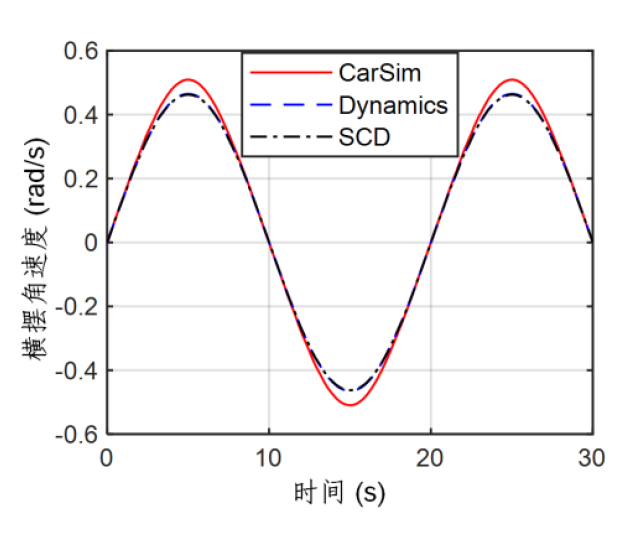
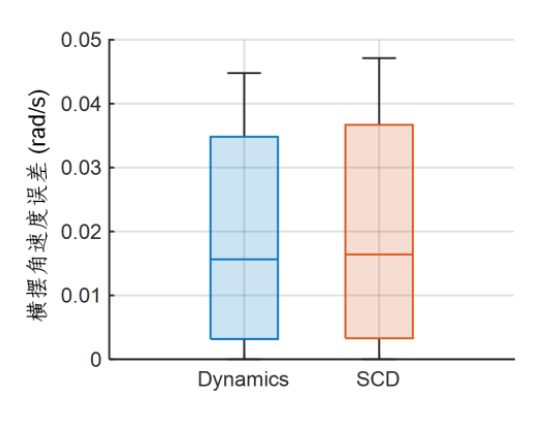
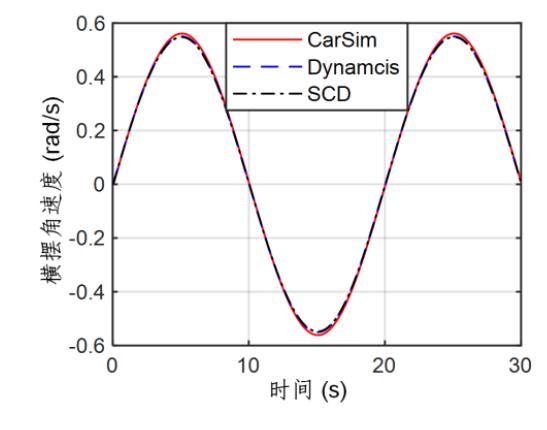
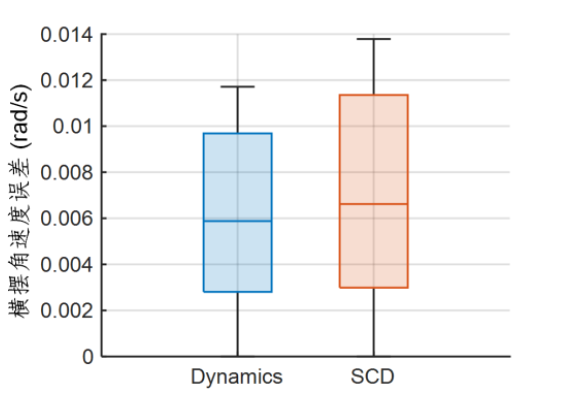
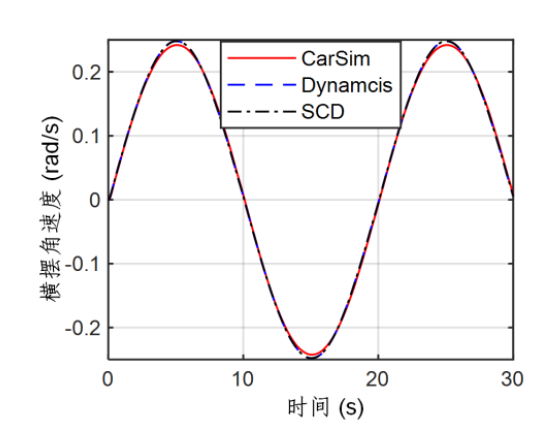
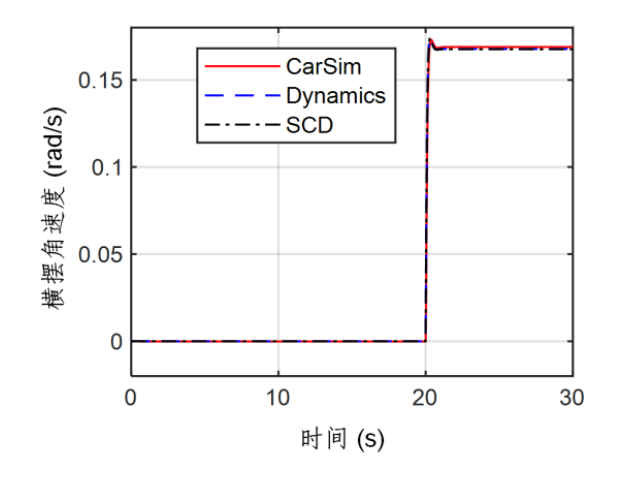
在CarSim和Simulink的联合仿真平台上,我们进行了横向和纵向运动特性试验。通过对比IKD模型、传统的运动学模型和动力学模型,验证了IKD模型在高低速工况下均表现出较好的模型精度。实验结果显示,在不同速度和不同操控条件下,IKD模型能够有效捕捉车辆的动态特性,展现出更好的控制性能。
NMPC算法的计算效率与控制精度
在自动驾驶系统中,NMPC算法的计算效率和控制精度至关重要。在离散求解NMPC运动控制问题时,车辆模型方程的刚性特征会对计算效率造成影响。当模型表现出刚性时,传统的离散方法需要使用较小的离散时间步长,以确保求解的精度和数值计算的稳定性。然而,较小的时间步长会导致计算效率降低。
为此,我们提出了一种基于有限单元正交配置(Orthogonal Collocation on Finite Elements,OCFE)离散的NMPC运动控制算法。这种方法相比传统的欧拉离散法和四阶龙格-库塔法,能够在保证数值稳定性的前提下,提高NMPC求解的计算效率。通过CarSim和Simulink的联合仿真对比,验证了基于OCFE离散的NMPC控制算法在刚性方程情况下的优越性。
此外,当车辆模型为非刚性方程时,OCFE离散方法同样展现出更高的精度。仿真结果表明,该方法有效解决了因模型刚性导致的计算低效问题,同时提高了控制精度,为自动驾驶系统的实时控制提供了更可靠的技术支持。
极限工况下的控制挑战
在高速转向和低附着路面等极限工况下,车辆模型的非线性特性加剧,NMPC算法的实时求解负担也随之增加。这不仅影响了控制系统的响应速度,还可能导致车辆失去稳定性,进而造成轨迹跟踪的失败。因此,必须设计一种综合考虑控制精度、实时性和车辆稳定性的控制算法。
针对这一挑战,本文研究设计了轨迹跟踪控制算法和稳定性控制算法。在极限工况下,为了平衡轨迹跟踪控制的精度和实时性,我们利用NMPC的滚动优化特性,提出了一种级联离散方法。此外,为特定的高速行驶场景,设计了一种NMPC预测时域扩展策略,以提高控制的适应性和精度。
在稳定性控制方面,我们引入了主动后轮转向技术,以防止车辆质心侧偏角的过度增大。这一措施有助于在极限工况下保持车辆的稳定性。此外,通过实时估计轮胎侧向力,我们可以对侧偏刚度进行校正,从而增强控制算法的鲁棒性。
通过在CarSim和Simulink的联合仿真中验证,所提出的运动控制算法能够在高速转向和低附着路面等极限工况下,保持良好的车辆稳定性,同时实现轨迹跟踪精度与控制实时性的良好平衡。实验结果显示,该控制策略在应对动态环境和复杂工况时,表现出优越的适应能力和稳定性。
% Nonlinear Model Predictive Control for Autonomous Vehicle
% Parameters initialization
dt = 0.1; % Time step
T = 20; % Total simulation time in seconds
N = T/dt; % Number of time steps
% Vehicle model parameters
L = 2.5; % Wheelbase
mass = 1500; % Vehicle mass in kg
Iz = 2500; % Yaw moment of inertia
Cf = 19000; % Cornering stiffness front
Cr = 19000; % Cornering stiffness rear
% State vectors initialization
x = zeros(N, 1); % X position
y = zeros(N, 1); % Y position
theta = zeros(N, 1); % Orientation angle
vx = zeros(N, 1); % Velocity in x
vy = zeros(N, 1); % Velocity in y
delta = zeros(N, 1); % Steering angle
% NMPC parameters
Q = diag([1, 1, 1, 0.1]); % State cost matrix
R = diag([0.1]); % Control cost matrix
% Simulation loop
for k = 1:N-1
% Define the state vector
state = [x(k); y(k); theta(k); vx(k); vy(k)];
% Define the desired trajectory (straight line for simplicity)
desired_state = [x(k) + 5; y(k); 0; 10; 0]; % Next point
% NMPC optimization problem (placeholder for the optimization logic)
% Here you would set up your optimization problem based on the state
% and desired trajectory, solve it, and extract the control inputs.
% Example control input update (placeholder)
control_input = -inv(R) * (state - desired_state); % Simple feedback for demo
% Update state based on control input (basic bicycle model)
vx(k+1) = vx(k) + control_input(1) * dt; % Update velocity
delta(k+1) = control_input(2); % Update steering angle
x(k+1) = x(k) + vx(k) * cos(theta(k)) * dt;
y(k+1) = y(k) + vx(k) * sin(theta(k)) * dt;
theta(k+1) = theta(k) + (vx(k) / L) * tan(delta(k)) * dt; % Update orientation
end
% Plot the results
figure;
subplot(3, 1, 1);
plot(x, y);
xlabel('X Position (m)');
ylabel('Y Position (m)');
title('Vehicle Path Tracking');
subplot(3, 1, 2);
plot(0:dt:T-dt, vx);
xlabel('Time (s)');
ylabel('Velocity (m/s)');
title('Vehicle Velocity');
subplot(3, 1, 3);
plot(0:dt:T-dt, delta);
xlabel('Time (s)');
ylabel('Steering Angle (rad)');
title('Steering Angle Control');



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











