






一、主要内容
主要围绕自主决策带换道功能的横纵向一体的 ACC 控制策略展开研究,旨在实现城市快速干道及高速公路工况下 ACC 车辆的自主换道功能。
1通过阅读大量文献中对国内外智能汽车技术的发展及研究现状进行了详细阐述,分析了目前 ACC 系统发展趋势及研究存在的不足,交代了本文的研究意义、主要研究内容及技术路线。
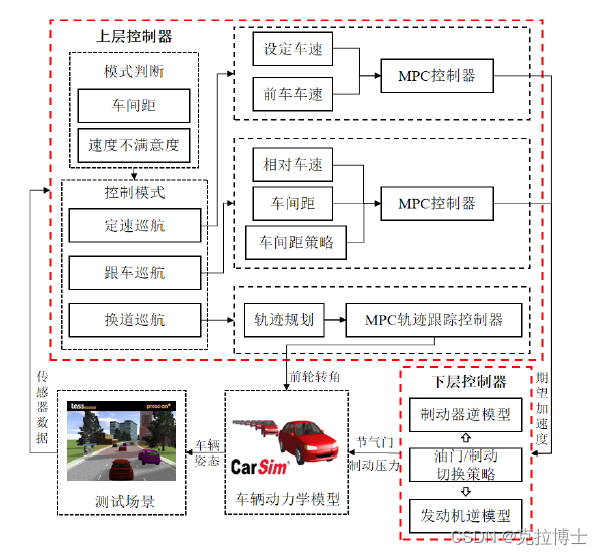
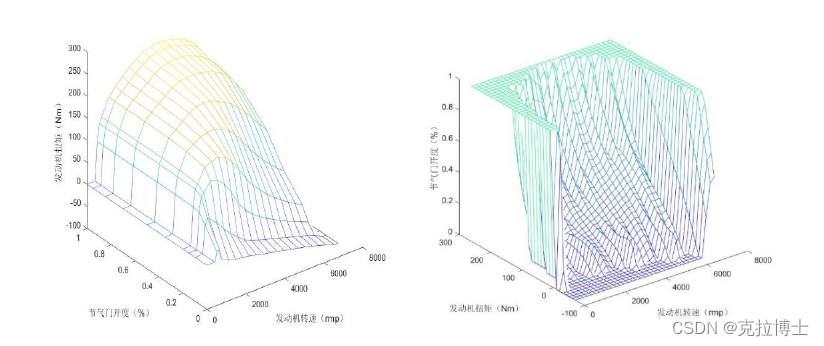
2,ACC 车辆控制器及多模式控制策略研究。确定了自主决策带换道功能的横纵向一体的ACC控制系统框架,采用分层式结构对ACC车辆控制器进行设计。分别设计了上层控制器和下层控制器,另外为保证下层控制器的稳定性和精准性,基于CarSim/Simulink 仿真平台进行了仿真测试验证。
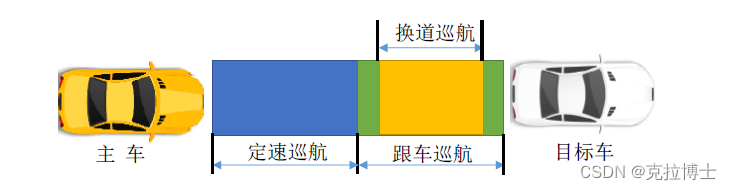
3,ACC车辆换道决策机制。对ACC车辆的换道决策机制进行了说明,以速度不满意累计度作为基准值判断是否存在换道意图,以最小安全距离作为基准值判断是否存在换道条件。为有效开展相关研究将车辆换道场景进行简化,并完成了对ACC 车辆的换道决策机制的设计。
4,ACC 车辆换道轨迹规划及跟踪控制。分析对比了各类轨迹规划方法,选用曲率光滑且结构简单的五次多项式进行了 ACC 车辆换道轨迹规划。建立了车辆二自由度动力学模型,基于模型预测理论设计了 MPC 轨迹跟踪控制器。为保证轨迹跟踪的稳定性及精确性,基于 CarSim/Simulink 仿真平台进行了仿真测试。
5,仿真测试及半实物验证。对自动驾驶仿真测试进行了简要概述,设计了三类测试工况,基于 VTD/CarSim/Matlab/Simulink 和 NI PXI 实时系统分别搭建了虚拟仿真测试平台和半实物仿真平台对本文开发的功能进行了测试验证。结果表明本文开发的自主决策带换道功能的横纵向一体的 ACC 控制算法及策略稳定且高效。
二、代码与仿真


三、更多汽车控制系统论文范文
智能汽车交通拥堵辅助系统虚拟主客观评价技术研究
基于立体视觉和深度学习的车载环境感知方法研究
基于坡度预测的纯电动汽车经济性巡航控制方法研究
基于强化学习的汽车协同式自适应巡航控制技术研究
基于轮毂电机驱动的BRT新能源公交车自适应巡航控制研究
考虑道路条件的自适应巡航控制算法研究
汽车自适应巡航系统控制策略和仿真验证
基于多目标优化的车辆多模式自适应巡航控制研究
基于滑模控制的车辆巡航控制算法研究
基于调频连续波的测距系统设计与实现
面向N3类清扫车感知需求的自适应巡航控制方法研究
基于学习控制的汽车全速自适应巡航决策与控制算法研究
基于弯道工况的多目标优化自适应巡航控制研究
基于虚拟场景的自适应巡航控制系统性能测试与分析
车载激光雷达的建模及应用研究
基于轮式驱动的新能源载重汽车自适应巡航控制及仿真研究
预测性节能辅助驾驶及评价研究
汽车巡航控制方法的研究
汽车电子软件的实时性验证方法研究
城市环境下纯电动汽车跟驰系统的研究
面向N3类清扫车感知需求的自适应巡航控制方法研究
基于学习控制的汽车全速自适应巡航决策与控制算法研究
基于弯道工况的多目标优化自适应巡航控制研究
基于虚拟场景的自适应巡航控制系统性能测试与分析
车载激光雷达的建模及应用研究
基于轮式驱动的新能源载重汽车自适应巡航控制及仿真研究
预测性节能辅助驾驶及评价研究
汽车巡航控制方法的研究
汽车电子软件的实时性验证方法研究
城市环境下纯电动汽车跟驰系统的研究
汽车自适应巡航多模式切换及主动换道控制研究
基于汽车毫米波雷达的目标跟踪算法研究
驾驶员跟车行为风格分类与人性化自适应巡航控制研究
智能汽车城区复杂交通情景的驾驶行为决策方法研究
汽车自适应巡航系统控制策略和仿真验证
基于学习控制的汽车全速自适应巡航决策与控制算法研究
纯电动汽车车距控制系统研究
汽车线控制动与半主动悬架制动工况联合控制研究
基于多传感器融合的智能汽车辅助驾驶模拟实验台研究
汽车纵向队列路面自适应协调控制研究
电动助力制动系统及压力控制方法研究
乘用车电机直驱线控制动系统设计与控制研究
基于多学科联合仿真的重型车辆混合动力行驶控制研究
车辆巡航防撞预警系统建模与仿真研究
基于学习的智能车车道保持与换道行为研究
基于模型预测控制的低附着路面下智能自适应巡航系统研究
基于异构计算的车辆检测与跟踪研究
基于多源数据融合的异构车辆数据匹配算法研究及应用
基于多源数据融合的异构车辆数据匹配算法研究及应用
自适应巡航系统前方有效目标识别
基于视觉的车道线识别研究
基于立体视觉和深度学习的车载环境感知方法研究
面向乘客的多目标城市轨道交通列车节能运行图优化
基于深度学习的车道线检测技术研究
基于TPFM和MPC的汽车经济型巡航控制方法研究
协同式走—停巡航控制策略研究
汽车自适应巡航系统(ACC)起停控制研究
基于前视摄像头的自适应巡航控制跟随模式研究
基于混杂系统模型预测控制的纵向驾驶辅助系统研究
考虑驾驶员风格的汽车纵向控制策略研究
具有故障诊断功能的某卡车车身控制器设计
具有转向控制功能的自适应巡航系统研究
24GHz汽车防撞雷达设计及实现
商用车热电最大功率跟踪及实时监控系统研究与设计
基于机器视觉和毫米波雷达的夜间车辆识别
汽车自适应巡航系统控制策略和仿真验证
汽车主动避撞控制系统控制方法研究
电动汽车复合储能系统及其能量控制策略的研究
嵌入式软件目标平台硬件与行为可视化建模技术
面向汽车驾驶性的动力传动系统准瞬态建模研究
智能汽车方向与速度综合决策的混合机理与规则建模研究
智能网联车辆与普通车辆混合车流交通状态估计方法研究
高压空气射流控制柴油预混合压缩着火相位模拟研究
混合动力汽车自适应巡航控制方法的研究
汽车巡航系统模糊控制与仿真研究
轮毂电机驱动电动汽车自适应巡航控制算法的研究
基于D2P MotoHawk的汽车自动巡航系统控制策略的研究
仿驾驶员速度跟随行为的自适应巡航控制算法研究
自动驾驶汽车下匝道路径优化控制策略研究
车辆经济性驾驶的策略辨识与操控规律
基于操纵意图的新能源汽车经济性控制策略的研究
基于STM32的车辆智能安全行车控制系统
基于巡航速度优化的混合动力车辆能量管理
电动汽车用六相SRM双三相滑模控制研究
自动变速汽车坡道行驶的燃油经济性研究
用于互联车辆的基于模型预测控制的钟祥控制器的设计和实验验证
车辆经济性驾驶的策略辨识与操控规律
汽车防撞雷达信号处理研究及系统设计
K波段汽车防撞雷达系统研究与实现
电动汽车车载管理系统的设计研究
汽车自适应巡航多模式切换及主动换道控制研究
基于汽车毫米波雷达的目标跟踪算法研究
驾驶员跟车行为风格分类与人性化自适应巡航控制研究
智能汽车城区复杂交通情景的驾驶行为决策方法研究
汽车自适应巡航系统控制策略和仿真验证
基于学习控制的汽车全速自适应巡航决策与控制算法研究
纯电动汽车车距控制系统研究
汽车线控制动与半主动悬架制动工况联合控制研究
基于多传感器融合的智能汽车辅助驾驶模拟实验台研究
汽车纵向队列路面自适应协调控制研究
















 535
535











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











