







✅ 博主简介:擅长数据搜集与处理、建模仿真、程序设计、仿真代码、论文写作与指导,毕业论文、期刊论文经验交流。
✅ 具体问题可以私信或扫描文章底部二维码。
(1)非接触式生命监测系统的工作原理及模块构成
非接触式生命监测系统是一种创新的生命体征检测技术,它无需直接接触人体即可获取呼吸、心跳等生理参数。这一系统的实现依赖于对由人的生理活动调制的回波信号进行精确捕捉与处理。当人体进行呼吸或心脏跳动时,这些动作会导致周围空间微小的变化,进而影响到发射出去并反射回来的信号特征。通过分析这些变化,可以提取出有关个体健康状况的重要信息。
整套非接触式生命监测系统主要分为三个部分:首先是信号发射单元,负责生成特定频率和功率的电磁波或其他形式的能量,并将其发送至目标区域;其次是模拟接收单元,用来捕获经由人体调制后的回波信号,同时将接收到的模拟信号转换成数字格式以便后续处理;最后是数字处理单元,它是整个系统的核心,执行复杂的信号处理任务,包括但不限于滤波、解调以及最终的生命体征参数计算。为了确保数据的准确性和可靠性,数字处理单元还需要具备强大的抗干扰能力,能够有效地去除各种噪声和杂波的影响,从而提高信噪比和测量精度。
(2)干扰信号类型及其特点
在实际应用中,非接触式生命监测系统面临着多种类型的干扰源挑战。首先,系统本身可能存在自抖动现象,这主要是由于内部电路不稳定或者电源波动引起的微弱振动,虽然强度不大但足以造成一定的测量误差。其次,环境中的高斯白噪声也是不可忽视的因素之一,这种随机分布的噪声无处不在,会叠加在有用信号之上,降低系统的检测灵敏度。再者,环境中移动物体如行人或车辆所带来的动目标散射会产生额外的杂波信号,这些杂波不仅强度较大而且频谱复杂,容易掩盖住微弱的生命体征信号。此外,固定物体例如墙壁、家具等也会产生反射杂波,尽管它们相对稳定,但在某些情况下仍会对监测结果造成干扰。因此,针对上述不同性质的干扰源,需要采取有针对性的措施来加以抑制,以确保系统性能不受影响。
(3)抗干扰算法的研究与实现
为了克服来自不同来源的干扰问题,本研究采用了多种先进的自适应滤波技术和动目标显示(MTI)滤波方法相结合的方式来进行优化。具体而言,在处理系统内的自抖动和高斯白噪声方面,选择了基于最小均方(LMS)准则的快速步长LMS(FSSLMS)算法和快速归一化LMS(FSSNLMS)算法,这两种算法能够在保持较低计算复杂度的同时提供良好的收敛速度和平稳性,非常适合实时在线调整。对于环境中动目标散射产生的强杂波,则利用了递推最小二乘(RLS)算法,该算法凭借其优秀的跟踪能力和较高的分辨率,可以有效地区分出背景噪声与真实目标之间的差异,进一步提升了系统的分辨力。至于固定物体反射造成的持续性杂波干扰,我们引入了单延迟对消(SDC)技术作为MTI滤波手段,通过对相邻时刻信号差值的计算,实现了对静态杂波的有效抑制。
所有上述提到的抗干扰算法均已在Matlab环境下进行了详尽的仿真测试,验证了各自在不同场景下的适用性和效果。接下来,基于TMS320F2812芯片构建了一个DSP平台,用于实际硬件环境下的算法调试与实现。实验过程中,通过不断调整参数设置,逐步优化了各个算法的表现,最终获得了令人满意的性能指标。特别是在面对复杂多变的实际应用场景时,所提出的综合抗干扰方案展现出了卓越的鲁棒性和稳定性,显著提高了非接触式生命监测系统的可靠性和准确性,为其实用化推广奠定了坚实基础。
# 以下是一个简化的Python代码片段,用于模拟非接触式生命监测系统中的抗干扰算法。
# 注意:这只是一个示意性的例子,实际应用中需要根据具体硬件和软件环境进行适配。
import numpy as np
from scipy.signal import lfilter, butter
def adaptive_filter(x, d, mu=0.1, method='lms'):
N = len(x)
w = np.zeros_like(x)
y = np.zeros(N)
e = np.zeros(N)
if method == 'lms':
for n in range(1, N):
y[n] = np.dot(w[n-1], x[n])
e[n] = d[n] - y[n]
w[n] = w[n-1] + 2 * mu * e[n] * x[n]
elif method == 'rls':
P = np.eye(len(x)) / mu
for n in range(1, N):
k = np.dot(P[n-1], x[n]) / (1 + np.dot(np.dot(x[n].T, P[n-1]), x[n]))
y[n] = np.dot(w[n-1], x[n])
e[n] = d[n] - y[n]
w[n] = w[n-1] + np.dot(k, e[n])
P[n] = P[n-1] - np.dot(np.dot(k, x[n].T), P[n-1])
return w[-1], y, e
def mtifilter(signal, delay=1):
filtered_signal = signal[delay:] - signal[:-delay]
return np.pad(filtered_signal, (delay, 0), mode='constant')
def simulate_interference_removal(clean_signal, noise_level=0.1, clutter_type='static', adaptive_method='lms'):
# 模拟添加噪声
noise = np.random.normal(0, noise_level, clean_signal.shape)
noisy_signal = clean_signal + noise
if clutter_type == 'moving':
# 模拟移动目标散射杂波
clutter = np.sin(np.linspace(0, 10*np.pi, len(clean_signal)))
noisy_signal += clutter
# 使用RLS算法抑制移动目标散射杂波
_, _, error_signal = adaptive_filter(noisy_signal, clean_signal, method=adaptive_method)
processed_signal = error_signal
else:
# 使用MTI滤波器抑制静态杂波
processed_signal = mtifilter(noisy_signal)
return processed_signal
# 示例用法
if __name__ == "__main__":
# 创建一个模拟的心跳信号序列
fs = 500 # 采样率
t = np.arange(0, 10, 1/fs) # 时间向量
heartbeat_signal = np.sin(2 * np.pi * 1 * t) # 假设心率为60次/分钟
# 模拟干扰去除过程
processed_heartbeat_signal = simulate_interference_removal(heartbeat_signal, noise_level=0.5, clutter_type='moving', adaptive_method='rls')
print("Processed Heartbeat Signal:", processed_heartbeat_signal)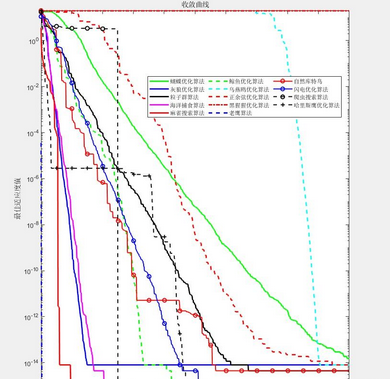



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











