







✅ 博主简介:擅长数据搜集与处理、建模仿真、程序设计、仿真代码、论文写作与指导,毕业论文、期刊论文经验交流。
✅ 具体问题可以私信或扫描文章底部二维码。
随着全球化的不断推进和“一带一路”战略的提出,尤其是“21世纪海上丝绸之路”构想的实施,中国的海运事业进入了快速发展的新时代。然而,随着海运量的不断增长,海上交通拥堵和船舶事故的发生频率也日益增加,给航海安全带来了前所未有的挑战。传统的航海安全保障主要依赖于值班驾驶员借助雷达、自动识别系统(AIS)、自动雷达标绘仪(ARPA)等辅助设备进行碰撞风险判断。然而,尽管这些设备在一定程度上提高了航海安全性,但船舶碰撞事故仍然频繁发生,造成了巨大的财产损失和人员伤亡。因此,如何通过更先进的技术,特别是智能技术,来提升航海安全,已成为亟待解决的问题。
近年来,随着物联网技术在多个领域的渗透,智能航海避碰系统的研究逐渐成为航海领域的一个重要研究方向。物联网技术通过将各种传感器设备与信息系统进行有机结合,能够为智能航海避碰提供实时、全面的海上信息支持。本文将物联网与智能算法相结合,提出了一种基于物联网架构的智能航海避碰算法,旨在通过实时数据采集与处理,提前预测船舶的碰撞风险,并给出有效的避碰决策,减少船舶碰撞事故的发生。
1. 基于物联网架构的智能航海避碰系统模型设计
智能航海避碰系统的核心在于如何高效地采集船舶及周围环境的实时信息,并基于这些信息做出科学的避碰决策。为此,本文设计了一种基于物联网架构的智能航海避碰系统模型。该系统由三个层次组成:感知层、传输层和应用层。
(1)感知层
感知层是智能航海避碰系统的基础层,负责采集船舶本身以及周围环境的各类信息。为了提高系统的性价比与效率,感知层采用了一系列智能传感器模块,这些传感器模块不仅能够对船舶的航行状态(如速度、航向、位置)进行实时监测,还能够通过集成的环境传感器,获取如气象、海流、能见度等环境数据。感知层的任务是确保实时数据的准确采集,并将这些数据传输至传输层进行处理。
(2)传输层
传输层的核心任务是确保感知层采集到的数据能够无缝、安全地传输至应用层进行进一步处理。基于物联网架构,传输层通常依赖于物联网中间件来实现不同设备之间的数据交互。Zigbee协议是目前物联网中常用的一种无线通信协议,具有低功耗、高效性和适用于大范围网络的特点。在本系统中,Zigbee协议被用作数据传输的基础架构,确保船舶及环境数据能够稳定传输至应用层进行分析和决策。
(3)应用层
应用层是整个智能航海避碰系统的核心部分,它通过处理感知层传输过来的数据,并结合智能算法进行碰撞风险预测与避碰决策。具体来说,应用层利用多种智能算法来分析和预测船舶未来的航行路径,并基于船舶之间的相对位置、速度、航向等信息,评估潜在的碰撞风险。当系统检测到碰撞风险时,应用层能够根据计算结果生成避碰优先序列,供值班驾驶员参考,从而提前采取避碰措施,确保航行安全。
2. 改进的智能航海避碰算法设计
为了提高智能航海避碰系统的精准性和实时性,本文提出了一种改进的智能航海避碰算法。该算法基于层次分析法(AHP)和BP人工神经网络算法,结合环境因子对航行风险进行评估。以下是该算法的详细设计过程:
(1)基于AHP的环境因子权重确定
智能航海避碰系统的关键在于如何综合考虑各种环境因素的影响。在实际海上航行过程中,除了船舶自身的动态信息(如速度、航向、位置)外,气象、海流、能见度等环境因素也对航行安全产生重要影响。因此,本文采用了层次分析法(AHP)来确定这些环境因素在决策中的权重。
AHP是一种用于多目标决策分析的方法,通过构建层次结构模型,将复杂的决策问题分解为多个子问题,进而综合各因素的重要性。在智能航海避碰系统中,AHP被用来分析和确定气象条件、海流变化、能见度等环境因素对航行安全的影响权重。通过这一分析,系统能够根据实时环境变化动态调整避碰策略。
(2)BP神经网络算法的应用
基于AHP确定环境因子的权重后,本文进一步应用BP人工神经网络(BP-NN)算法对船舶的航行习惯进行学习和预测。BP神经网络是一种广泛应用于模式识别和预测分析的算法,通过训练网络模型,能够学习到船舶的历史航行数据,从而对未来航行路径进行预测。
在实际操作中,BP神经网络通过学习船舶的历史航行数据(如速度、航向、位置)来预测船舶在未来某一时刻的位置信息。系统通过不断训练和优化神经网络,提升预测的准确性。在预测未来位置后,系统结合环境因子,进一步评估该位置的碰撞风险度,并基于此生成避碰优先序列。
(3)避碰优先序列的生成
在获得未来位置的预测和碰撞风险度后,系统根据航海学知识建立碰撞风险评估模型,判断预测位置的碰撞风险等级。通过对多船舶的碰撞风险度进行排序,系统能够生成一个避碰优先序列,供值班驾驶员参考。这个序列按照风险高低排列,确保船员能够优先处理最危险的碰撞威胁,从而提高航行安全性。
3. 改进智能航海避碰算法的仿真与验证
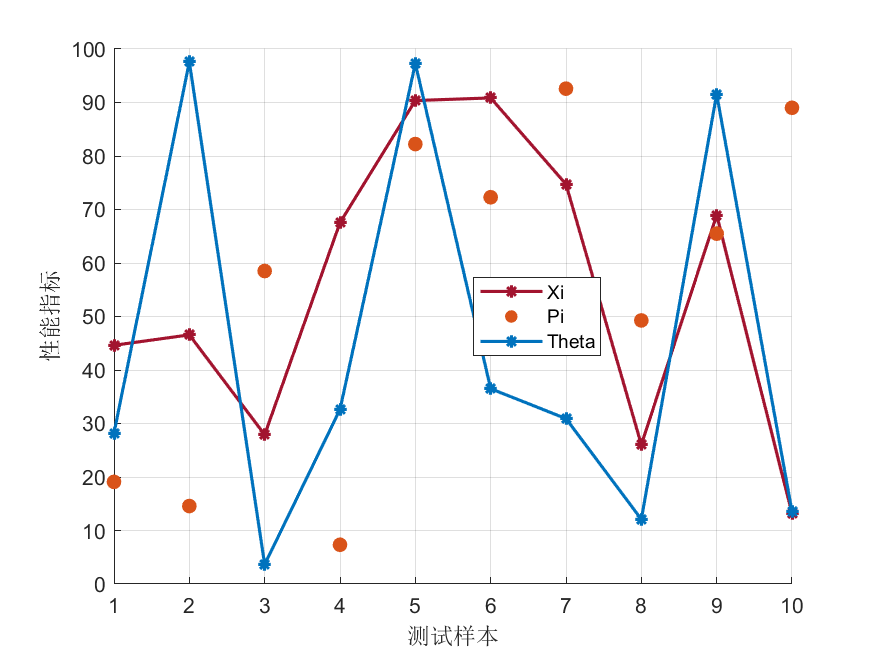
为了验证所提出的改进智能航海避碰算法的有效性和可行性,本文基于MATLAB平台对算法进行了建模仿真。仿真过程中,使用了渤海海域内渔船、货船等实际船舶的历史航行记录数据作为测试用例。通过对比不同算法的避碰效果,评估了改进算法在实际航行中的应用效果。
仿真结果表明,改进后的智能航海避碰算法在预测船舶碰撞风险方面具有较高的准确性,能够有效降低碰撞事故的发生概率。此外,算法能够动态调整避碰策略,在不同环境条件下提供优化的避碰决策,具有良好的实际应用价值。
# Code for implementing the improved intelligent collision avoidance algorithm
import numpy as np
from sklearn.neural_network import MLPRegressor
import matplotlib.pyplot as plt
# Load the dataset (historical ship navigation data)
# Example data: [speed, heading, position_x, position_y, environmental_factors]
data = np.loadtxt('ship_navigation_data.txt')
# Split the data into features and target
X = data[:, :-1] # Features: speed, heading, etc.
y = data[:, -1] # Target: position prediction
# Train the BP neural network (MLPRegressor)
model = MLPRegressor(hidden_layer_sizes=(100,), max_iter=1000)
model.fit(X, y)
# Predict future positions
future_position = model.predict(X[-1].reshape(1, -1))
# Plot the predicted positions
plt.plot(future_position)
plt.title('Predicted Future Position')
plt.xlabel('Time')
plt.ylabel('Position')
plt.show()



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











