







 本文详细介绍了四种常见的图像边缘检测算子:Sobel、Scharr、Laplacian和Canny算子。边缘检测是图像处理的重要步骤,用于识别图像中物体的特征区域轮廓。文章阐述了边缘检测的评价标准,强调了导数在边缘检测中的作用,并对比了各种算子的优缺点。Canny算子被认为是边缘检测的最优算法,它通过高斯滤波、非极大值抑制和双阈值检测来优化边缘定位和噪声抑制。
本文详细介绍了四种常见的图像边缘检测算子:Sobel、Scharr、Laplacian和Canny算子。边缘检测是图像处理的重要步骤,用于识别图像中物体的特征区域轮廓。文章阐述了边缘检测的评价标准,强调了导数在边缘检测中的作用,并对比了各种算子的优缺点。Canny算子被认为是边缘检测的最优算法,它通过高斯滤波、非极大值抑制和双阈值检测来优化边缘定位和噪声抑制。
目的:
边缘检测算子很多,基本上都是对图像开一阶导数或者二阶导数,如果将边缘认为是一定数量点亮度发生变化的地方,那么边缘检测大体上就是计算这个亮度变化的导数。这次学习进一步了解图像边缘检测的算子。
任务:
写一个彩色图片中的物体进行边缘检测,能识别出物体的特征区域轮廓;
边缘检测
边缘检测的三个主要评价标准是:
- 低错误率: 标识出尽可能多的实际边缘,同时尽可能的减少噪声产生的误报。
- 高定位性: 标识出的边缘要与图像中的实际边缘尽可能接近。
- 最小响应: 图像中的边缘只能标识一次。
不同图像灰度不同,边界处一般会有明显的边缘,利用此特征可以分割图像。需要说明的是:边缘和物体间的边界并不等同,边缘指的是图像中像素的值有突变的地方,而物体间的边界指的是现实场景中的存在于物体之间的边界。有可能有边缘的地方并非边界,也有可能边界的地方并无边缘,因为现实世界中的物体是三维的,而图像只具有二维信息,从三维到二维的投影成像不可避免的会丢失一部分信息;另外,成像过程中的光照和噪声也是不可避免的重要因素。正是因为这些原因,基于边缘的图像分割仍然是当前图像研究中的世界级难题,目前研究者正在试图在边缘提取中加入高层的语义信息。
在实际的图像分割中,往往只用到一阶和二阶导数,虽然,原理上,可以用更高阶的导数,但是,因为噪声的影响,在纯粹二阶的导数操作中就会出现对噪声的敏感现象,三阶以上的导数信息往往失去了应用价值。二阶导数还可以说明灰度突变的类型。在有些情况下,如灰度变化均匀的图像,只利用一阶导数可能找不到边界,此时二阶导数就能提供很有用的信息。二阶导数对噪声也比较敏感,解决的方法是先对图像进行平滑滤波,消除部分噪声,再进行边缘检测。不过,利用二阶导数信息的算法是基于过零检测的,因此得到的边缘点数比较少,有利于后继的处理和识别工作。
各种算子的存在就是对这种导数分割原理进行的实例化计算,是为了在计算过程中直接使用的一种计算单位。
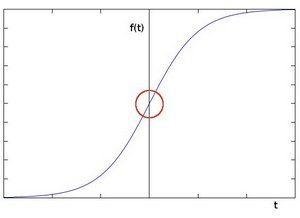
为什么对图像进行求导是重要的呢? 假设我们需要检测图像中的 边缘 ,到在物体边缘处,像素值明显改变。导数可以用来表示这一像素值得改变。梯度值的大变预示着图像中内容的变化。如下图:

用更加形象的图像来解释,假设我们有一张一维图形。下图中灰度值的”跃升”表示边缘的存在:
使用一阶微分求导我们可以更加清晰的看到边缘“跃升”的存在(这里显示为高峰值)
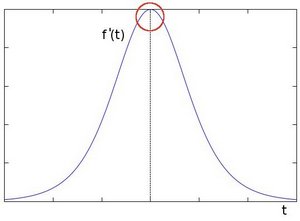
从上面可以推论检测边缘可以通过梯度值大于邻域的像素方法找到。以上就是一阶导数检测图像边缘,如果在边缘部分求二阶导数会出现什么情况?
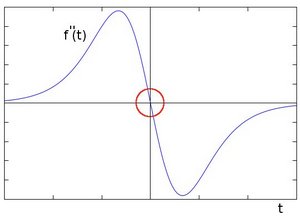
在一阶导数的极值位置,二阶导数为0。所以我们也可以用这个特点来作为检测图像边缘的方法。 但是, 二阶导数的0值不仅仅出现在边缘(它们也可能出现在无意义的位置),不过可以过滤掉这些点。
1.Sobel算子
Sobel算子其主要用于边缘检测,在技术上它是以离散型的差分算子,用来运算图像亮度函数的梯度的近似值, Sobel算子是典型的基于一阶导数的边缘检测算子,由于该算子中引入了类似局部平均的运算,因此对噪声具有平滑作用,能很好的消除噪声的影响。Sobel算子对于象素的位置的影响做了加权,与Prewitt算子、Roberts算子相比因此效果更好。
Sobel 算子结合了高斯平滑和微分求导,它是一个离散微分算子 (discrete differentiation operator)。用来计算图像灰度函数的近似梯度。
Sobel算子包含两组 3∗3 的矩阵,分别为横向及纵向模板,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。实际使用中,常用如下两个模板来检测图像边缘。
算法实现
首先在在两个方向求导:
1.水平变化: 将图像 I 与一个奇数大小的内核
2.垂直变化: 将图像 I 与一个奇数大小的内核
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2308
2308

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









