







一、图像的边缘检测及edge函数的Prewitt和Ganny算子
①图像的边缘:指其周围像素灰度急剧变化的那些像素的集合,他是图像最基本的特征。边缘存在于目标,背景和区域之间,所以,它是图像分割所依赖的最重要的依据。由于边缘是位置的标志,对灰度的变化不敏感,因此边缘也是图像匹配的重要特征。
边缘检测基本思想是先检测图像中的边缘点,在按照某种策略将边缘点连接成轮廓,从而构成分割区域。
②Prewitt算子是一种一阶微分算子的边缘检测,利用像素点上下、左右邻点的灰度差,在边缘处达到极值检测边缘,去掉部分伪边缘,对噪声具有平滑作用 。其原理是在图像空间利用两个方向模板与图像进行邻域卷积来完成的,这两个方向模板一个检测水平边缘,一个检测垂直边缘。
对数字图像f(x,y),Prewitt算子的定义如下:
G(i)=|[f(i-1,j-1)+f(i-1,j)+f(i-1,j+1)]-[f(i+1,j-1)+f(i+1,j)+f(i+1,j+1)]|
G(j)=|[f(i-1,j+1)+f(i,j+1)+f(i+1,j+1)]-[f(i-1,j-1)+f(i,j-1)+f(i+1,j-1)]|
则 P(i,j)=max[G(i),G(j)]或 P(i,j)=G(i)+G(j)
经典Prewitt算子认为:凡灰度新值大于或等于阈值的像素点都是边缘点。即选择适当的阈值T,若P(i,j)≥T,则(i,j)为边缘点,P(i,j)为边缘图像。这种判定是欠合理的,会造成边缘点的误判,因为许多噪声点的灰度值也很大,而且对于幅值较小的边缘点,其边缘反而丢失了。
③Ganny边缘检测算子是边缘检测算子中最常用的一种,也是公认的性能优良的边缘检测算子,但它实现起来较为麻烦,Canny算子是一个具有滤波,增强,检测的多阶段的优化算子,在进行处理前,Canny算子先利用高斯平滑滤波器来平滑图像以除去噪声,Canny分割算法采用一阶偏导的有限差分来计算梯度幅值和方向,在处理过程中,Canny算子还将经过一个非极大值抑制的过程,最后Canny算子还采用两个阈值来连接边缘。
Canny边缘检测算法
step1: 用高斯滤波器平滑图象;
step2: 用一阶偏导的有限差分来计算梯度的幅值和方向;
step3: 对梯度幅值进行非极大值抑制
step4: 用双阈值算法检测和连接边缘
相关例题
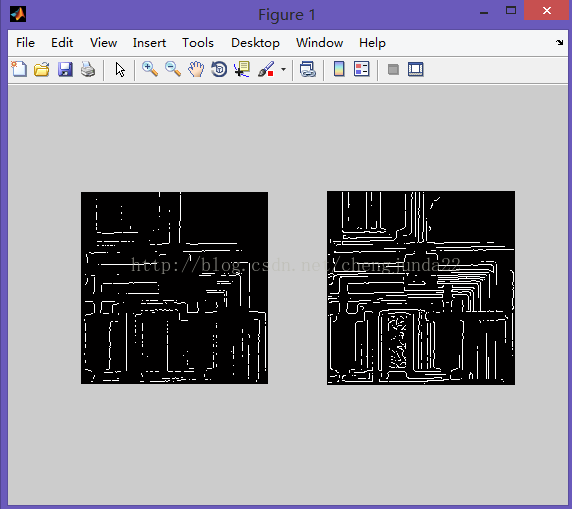
I=imread('circuit.tif');%读入图像
BW1=edge(I,'prewitt');%采用prewitt算子进行边缘检测
BW2=edge(I,'canny');%采用canny算子进行边缘检测
subplot(1,2,1),imshow(BW1);%显示
subplot(1,2,2),imshow(BW2);
二、角点特征检测及Harris角点的基本原理
①何谓“角点”:对角点可以从两个不同的角度定义:角点是邻域内具有两个主方向的特征点。角点所在的邻域通常也是图像中最稳定的,信息最丰富的区域,这些领域可能具有某些特征,如旋转不变性、尺度不变性、仿射不变性和光照亮度不变性。因此在计算机视觉和数字图像领域,研究角点具有重要的意义。
②Harris角点的基本原理:
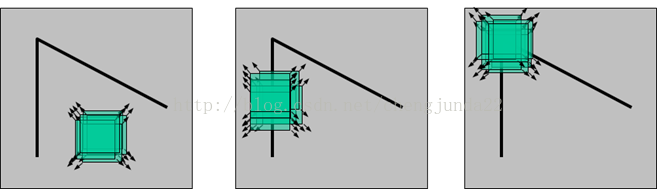
人眼对角点的识别通常是在一个局部的小区域或小窗口完成的。如果在各个方向上移动这个特征的小窗口,窗口内区域的灰度发生了较大的变化,那么就认为在窗口内遇到了角点。如果这个特定的窗口在图像各个方向上移动时,窗口内图像的灰度没有发生变化,那么窗口内就不存在角点;如果窗口在某一个方向移动时,窗口内图像的灰度发生了较大的变化,而在另一些方向上没有发生变化,那么,窗口内的图像可能就是一条直线的线段。
对于图像I(x,y),当在点(x,y)处平移(Δx,Δy)后的自相似性,可以通过自相关函数给出:
c(x,y;Δx,Δy)=∑(u,v)∈W(x,y)w(u,v)(I(u,v)–I(u+Δx,v+Δy))2
其中,W(x,y)是以点(x,y)为中心的窗口,w(u,v)为加权函数,它既可是常数,也可以是高斯加权函数。

根据泰勒展开,对图像I(x,y)在平移(Δx,Δy)后进行一阶近似:
I(u+Δx,v+Δy)=I(u,v)+Ix(u,v)Δx+Iy(u,v)Δy+O(Δx2,Δy2)≈I(u,v)+Ix(u,v)Δx+Iy(u,v)Δy
其中,Ix,Iy是图像I(x,y)的偏导数,这样的话,自相关函数则可以简化为:
c(x,y;Δx,Δy)≈∑w(Ix(u,v)Δx+Iy(u,v)Δy)2=[Δx,Δy]M(x,y)[ΔxΔy]
其中
M(x,y)=∑w[Ix(x,y)2Ix(x,y)Iy(x,y)Ix(x,y)Iy(x,y)Iy(x,y)2]=????∑wIx(x,y)2∑wIx(x,y)Iy(x,y)∑wIx(x,y)Iy(x,y)∑wIy(x,y)2????=[ACCB]
也就是说图像I(x,y)在点(x,y)处平移(Δx,Δy)后的自相关函数可以近似为二项函数:
c(x,y;Δx,Δy)≈AΔx2+2CΔxΔy+BΔy2
其中
A=∑wI2x,B=∑wI2y,C=∑wIxIy
二次项函数本质上就是一个椭圆函数。椭圆的扁率和尺寸是由M(x,y)的特征值λ1、λ2决定的,椭贺的方向是由M(x,y)的特征矢量决定的,如下图所示,椭圆方程为:
[Δx,Δy]M(x,y)[ΔxΔy]=1

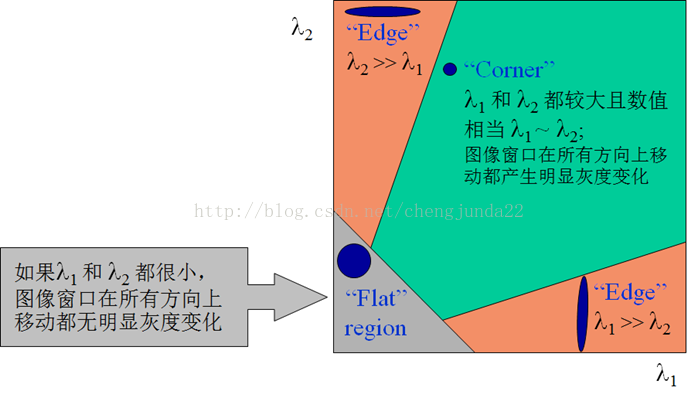
椭圆函数特征值与图像中的角点、直线(边缘)和平面之间的关系如下图所示。共可分为三种情况:
图像中的直线。一个特征值大,另一个特征值小,λ1?λ2或λ2?λ1。自相关函数值在某一方向上大,在其他方向上小。
图像中的平面。两个特征值都小,且近似相等;自相关函数数值在各个方向上都小。
图像中的角点。两个特征值都大,且近似相等,自相关函数在所有方向都增大。
根据二次项函数特征值的计算公式,我们可以求 M(x,y) 矩阵的特征值。但是Harris给出的角点差别方法并不需要计算具体的特征值,而是计算一个角点响应值 R 来判断角点。 R 的计算公式为:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









