







 本文介绍了Clark变换和Park变换的基本原理及其应用。Clark变换用于将三相静止坐标系下的信号转换为两相静止坐标系;Park变换则进一步将信号从两相静止坐标系转换到同步旋转坐标系。文中还提供了变换矩阵的具体形式及逆变换过程。
本文介绍了Clark变换和Park变换的基本原理及其应用。Clark变换用于将三相静止坐标系下的信号转换为两相静止坐标系;Park变换则进一步将信号从两相静止坐标系转换到同步旋转坐标系。文中还提供了变换矩阵的具体形式及逆变换过程。
clark变换:将abc 变换到 静止 的
αβ
α
β
坐标系下。
Park变换:将abc 变换到 旋转 的
dq
d
q
坐标系下。
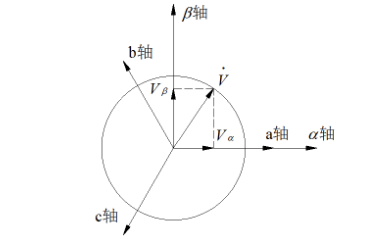
记三相对称电压如下:
如图所示,将它们投影到 αβ α β 轴上,有:
Clark transformation 3s−2s 3 s − 2 s (仅考虑三相三线制情形,零序分量被忽略,详细推导可参考陈伯时《电力拖动自动控制系统-运动控制系统》第三版 P263)
若 m=23−−√ m = 2 3 ,变换前后,功率不变。又称为: Concordia变换
若 m=23 m = 2 3 , 变换前后,幅值不变。
Inverse Clark transformation
2s−3s
2
s
−
3
s
若
m′=23−−√
m
′
=
2
3
,变换前后,功率不变。
若
m′=1
m
′
=
1
,变换前后,幅值不变。
Park transformation 3s-3r
恒幅值:
inverse Park transformation 3r-3s
恒幅值:
从Clark变换 到Park变换,可由一个旋转变换连接:
Tabc/dq0=Tabc/αβ0∗Sαβ0/dq0 T a b c / d q 0 = T a b c / α β 0 ∗ S α β 0 / d q 0

















 792
792

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









