






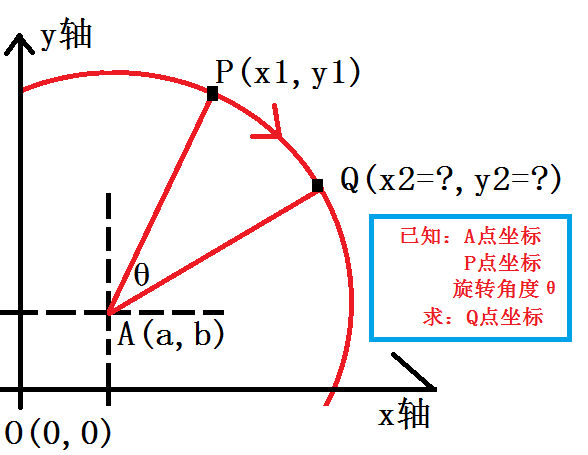
1.示例图
P(x1,y1)以点A(a,b)为圆心,旋转弧度为θ,求旋转后点Q(x2,y2)的坐标
2.实现方法
先将坐标平移,计算点(x1-a,y1-b)围绕原点旋转后的坐标,再将坐标轴平移到原状态
/// <summary>
/// 结构:表示一个点
/// </summary>
struct Point
{
//横、纵坐标
public double x, y;
//构造函数
public Point(double x, double y)
{
this.x = x;
this.y = y;
}
//该点到指定点pTarget的距离
public double DistanceTo(Point p)
{
return Math.Sqrt((p.x - x) * (p.x - x) + (p.y - y) * (p.y - y));
}
//重写ToString方法
public override string ToString()
{
return string.Concat("Point (",
this.x.ToString("#0.000"), ',',
this.y.ToString("#0.000"), ')');
}
}
/// <summary>
/// 计算点P(x,y)与X轴正方向的夹角
/// </summary>
/// <param name="x">横坐标</param>
/// <param name="y">纵坐标</param>
/// <returns>夹角弧度</returns>
private static double radPOX(double x,double y)
{
//P在(0,0)的情况
if (x == 0 && y == 0) return 0;
//P在四个坐标轴上的情况:x正、x负、y正、y负
if (y == 0 && x > 0) return 0;
if (y == 0 && x < 0) return Math.PI;
if (x == 0 && y > 0) return Math.PI / 2;
if (x == 0 && y < 0) return Math.PI / 2 * 3;
//点在第一、二、三、四象限时的情况
if (x > 0 && y > 0) return Math.Atan(y / x);
if (x < 0 && y > 0) return Math.PI - Math.Atan(y / -x);
if (x < 0 && y < 0) return Math.PI + Math.Atan(-y / -x);
if (x > 0 && y < 0) return Math.PI * 2 - Math.Atan(-y / x);
return 0;
}
/// <summary>
/// 返回点P围绕点A旋转弧度rad后的坐标
/// </summary>
/// <param name="P">待旋转点坐标</param>
/// <param name="A">旋转中心坐标</param>
/// <param name="rad">旋转弧度</param>
/// <param name="isClockwise">true:顺时针/false:逆时针</param>
/// <returns>旋转后坐标</returns>
private static Point RotatePoint(Point P, Point A,
double rad, bool isClockwise = true)
{
//点Temp1
Point Temp1 = new Point(P.x - A.x, P.y - A.y);
//点Temp1到原点的长度
double lenO2Temp1 = Temp1.DistanceTo(new Point(0, 0));
//∠T1OX弧度
double angT1OX = radPOX(Temp1.x, Temp1.y);
//∠T2OX弧度(T2为T1以O为圆心旋转弧度rad)
double angT2OX = angT1OX - (isClockwise ? 1 : -1) * rad;
//点Temp2
Point Temp2 = new Point(
lenO2Temp1 * Math.Cos(angT2OX),
lenO2Temp1 * Math.Sin(angT2OX));
//点Q
return new Point(Temp2.x + A.x, Temp2.y + A.y);
}3.Main函数调用
static void Main(string[] args)
{
//求两点间长度
Point A = new Point(0, 0);
Point B = new Point(3, 4);
Console.WriteLine("Length of AB: " + A.DistanceTo(B));
Point P = new Point(5, -5);
Console.WriteLine(P.ToString() + '\n');
//绕原点(0,0)逆时针旋转
Console.WriteLine(RotatePoint(P, new Point(0, 0), Math.PI / 4 * 9, false));
Console.WriteLine(RotatePoint(P, new Point(0, 0), Math.PI / 4 * 10, false));
Console.WriteLine(RotatePoint(P, new Point(0, 0), Math.PI / 4 * 11, false));
Console.WriteLine(RotatePoint(P, new Point(0, 0), Math.PI / 4 * 12, false));
Console.WriteLine(RotatePoint(P, new Point(0, 0), Math.PI / 4 * 13, false));
Console.WriteLine(RotatePoint(P, new Point(0, 0), Math.PI / 4 * 14, false));
Console.WriteLine(RotatePoint(P, new Point(0, 0), Math.PI / 4 * 15, false));
Console.WriteLine(RotatePoint(P, new Point(0, 0), Math.PI / 4 * 16, false));
Console.WriteLine();
//绕点(2.5,2.5)顺时针旋转
Console.WriteLine(RotatePoint(P, new Point(2.5, 2.5), Math.PI / 4 * 1));
Console.WriteLine(RotatePoint(P, new Point(2.5, 2.5), Math.PI / 4 * 2));
Console.WriteLine(RotatePoint(P, new Point(2.5, 2.5), Math.PI / 4 * 3));
Console.WriteLine(RotatePoint(P, new Point(2.5, 2.5), Math.PI / 4 * 4));
Console.WriteLine(RotatePoint(P, new Point(2.5, 2.5), Math.PI / 4 * 5));
Console.WriteLine(RotatePoint(P, new Point(2.5, 2.5), Math.PI / 4 * 6));
Console.WriteLine(RotatePoint(P, new Point(2.5, 2.5), Math.PI / 4 * 7));
Console.WriteLine(RotatePoint(P, new Point(2.5, 2.5), Math.PI / 4 * 8));
Console.ReadLine();
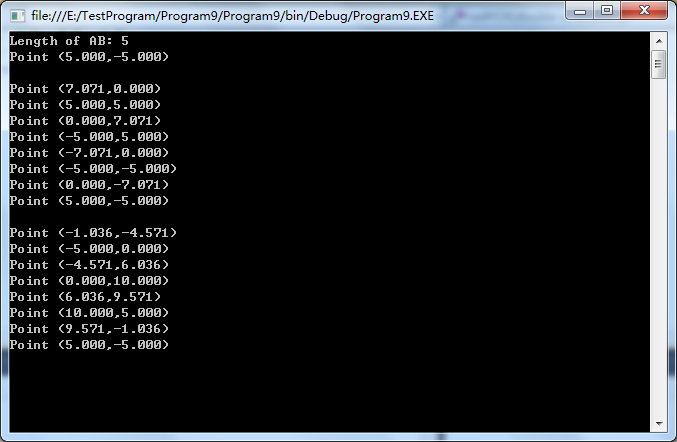
}4.运行结果















 3463
3463

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









