







 本文详细介绍了四轴飞行器电机控制的硬件原理和软件实现,通过STM32定时器设置PWM来调节电机转速。核心是利用定时器的重载和捕获/比较寄存器,通过调整占空比来控制电机转速。
本文详细介绍了四轴飞行器电机控制的硬件原理和软件实现,通过STM32定时器设置PWM来调节电机转速。核心是利用定时器的重载和捕获/比较寄存器,通过调整占空比来控制电机转速。
四轴飞控系列-电机PWM控制驱动

硬件原理
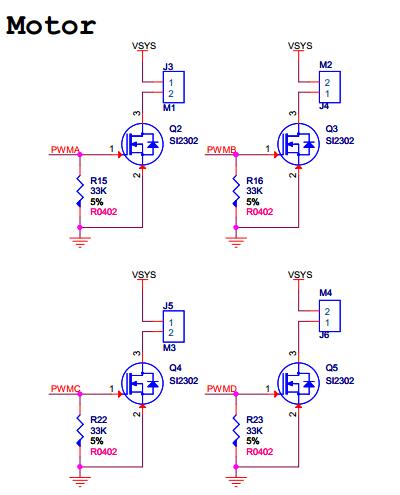
四轴通过定时器PWM来控制MOS管开关,从而控制电机的开关,通过调整其占空比来控制电机的转速,其原理图如下
软件部分
1.STM32定时器

2.常见寄存器
TIMx_CNT:脉冲计数器
TIMx_ARR:重载寄存器(保存定时器的溢出值)
TIMx_CCR:捕获/比较寄存器
3.基本定时器工作原理
工作时,脉冲计数器TIMx_CNT由时钟触发进行计数,当TIMx_CNT的计数值X等于重载寄存器 TIMx_ARR 中保存的数值N时,产生溢出事件,可触发中断或 DMA 请求。然后 TIMx_CNT 的值重新被置为 0,重新向上计数。
时钟源TIMx_CLK经过PSC预分频器输入至脉冲计数器TIMx_CNT,基本定时器只能工作在向上计数模式,在重载寄存器 TIMx_ARR 中保存的是定时器的溢出值。
4.PWM输出过程
若配置脉冲计数器TIMx_CNT为向上计数,而重载寄存器TIMx_ARR被配置为N,即TIMx_CNT的当前计数值数值X在TIMxCLK时钟源的驱动下不断累加,当 TIMx_CNT的数值 X 大于 N 时,会重置TIMx_CNT 数值为 0 并重新计数。
而在 TIMx_CNT 计数的同时,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1026
1026

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









