







 该博客介绍了基于OpenCV的立体匹配算法,包括BM、SGBM、VAR以及ELAS,并提供了相关参数设置参考。作者分享了源代码资源,供读者在CSDN上下载学习。
该博客介绍了基于OpenCV的立体匹配算法,包括BM、SGBM、VAR以及ELAS,并提供了相关参数设置参考。作者分享了源代码资源,供读者在CSDN上下载学习。
同http://blog.csdn.net/chuhang_zhqr/article/details/51179881类似,采用
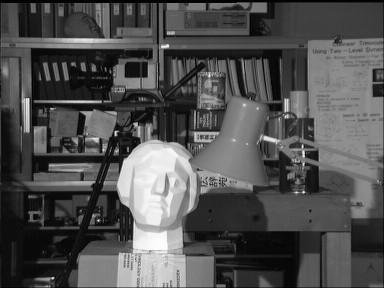
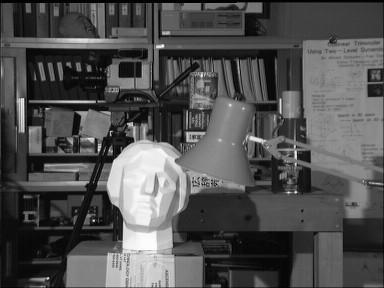
这两个经典的图片进行测试。
关于BM和SGBM以及VAR的参数设置请参考
晨宇思远
本文代码基于opencv2.4.9
本文源码地址在我的CSDN代码资源:
http://download.csdn.net/detail/chuhang_zhqr/9703763
0:ELAS
这里要去下载Elas的开源库函数。
int StereoMatch::ElasMatch()
{
cv::Mat disp_l,disp_r,disp8u_l,disp8u_r;
double minVal; double maxVal; //视差图的极值
cv::Mat leftImage = cv::imread("../test_images/leftr31.png",0);
cv::Mat rightImage = cv::imread("../test_images/rightr31.png",0);
// 计算视差
// generate disparity image using LIBELAS
int bd = 0;
const int32_t dims[3] = {leftImage.cols,leftImage.rows,leftImage.cols};
cv::Mat leftdpf = cv::Mat::zeros(cv::Size(leftImage.cols,leftImage.rows), CV_32F);
cv::Mat rightdpf = cv::Mat::zeros(cv::Size(leftImage.cols,leftImage.rows), CV_32F);
Elas::parameters param;
param.postprocess_only_left = false;
Elas elas(param);
elas.process(leftImage.data,rightImage.data,leftdpf.ptr<float>(0),rightdpf.ptr<float>(0),dims);
cv::Mat(leftdpf(cv::Rect(bd,0,leftImage.cols,leftImage.rows))).copyTo(disp_l);
cv::Mat(rightdpf(cv::Rect(bd,0,rightImage.cols,rightImage.rows))).copyTo(disp_r);
//-- Check its extreme values
cv::minMaxLoc( disp_l, &minVal, &maxVal );
cout<<"Min disp: Max value"<< minVal<<maxVal; //numberOfDisparities.= (maxVal - minVal)
//-- Display it as a CV_8UC1 image
disp_l.convertTo(disp8u_l, CV_8U, 255/(maxVal - minVal));//(numberOfDisparities*16.)
cv::minMaxLoc( disp_r, &minVal, &maxVal );
cout<<"Min disp: Max value"<< minVal<<maxVal; //numberOfDisparities.= (maxVal - minVal)
//-- Display it as a CV_8UC1 image
disp_r.convertTo(disp8u_r, CV_8U, 255/(maxVal - minVal));//(numberOfDisparities*16.)
cv::normalize(disp8u_l, disp8u_l, 0, 255, CV_MINMAX, CV_8UC1); // obtain normalized image
cv::normalize(disp8u_r, disp8u_r, 0, 255, CV_MINMAX, CV_8UC1); // obtain normalized image
cv::imshow("Left",leftImage);
cv::imshow("Right",rightImage);
cv::imshow("Elas_left",disp8u_l);
cv::imshow("Elas_right",disp8u_r);
cv::imwrite("Elas_left.png",disp8u_l);
cv::imwrite("Elas_right.png",disp8u_r);
cout<<endl<<"Over"<<endl;
cv::waitKey(0);
return 0;
}
1:BM算法
int StereoMatch::BMMatching()
{
cv::Mat disp,disp8u;
double minVal; double maxVal; //视差图的极值
cv::Mat leftImage = cv::imread("../test_images/leftr.png",0);
cv::Mat rightImage = cv::imread("../test_images/rightr.png",0);
int SADWindowSize = 19;
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









