







 本文介绍了数字滤波器设计,主要包括IIR滤波器的脉冲响应不变法和双线性变换法,以及FIR滤波器设计中的窗函数法,特别讨论了如何设计FIR高通滤波器。
本文介绍了数字滤波器设计,主要包括IIR滤波器的脉冲响应不变法和双线性变换法,以及FIR滤波器设计中的窗函数法,特别讨论了如何设计FIR高通滤波器。
数字滤波一般分为时域滤波和频域滤波。频域滤波是将时域变换到频域,对相应频率做调整,然后反变换到时域,抛开FFT的话过程相对简单。在这里我们主要说时域滤波。
时域滤波器分为无限脉冲响应IIR和有限脉冲响应FIR两种。IIR滤波器的优点是可以用较低的阶数(相比同样指标的FIR滤波器)实现滤波器。缺点一:不是线性相位,只能用于对相位信息不敏感的信号(如音频信号)。缺点二:有可能是不稳定的。在设计的过程中为了保持稳定性和因果性,要求z变换所有的极点都必须位于单位圆内。但即使是这样,也可能由于量化舍入等因素引起的误差最终导致IIR滤波器不稳定。FIR滤波器的优点是可以设计成具有线性相位的,并且是稳定的(FIR滤波器除原点处外没有极点),缺点是阶数高,也就是说计算量大。
IIR滤波器设计:
IIR滤波器最终具有如下形式:

FIR滤波器最终为:

IIR滤波器的设计主要是将已经比较成熟的连续时间滤波器(如巴特沃兹滤波器,切比雪夫滤波器,椭圆滤波器)变换成满足指标的离散时间滤波器。主要方法使脉冲响应不变法和双线性变换法。
脉冲响应不变法:
脉冲响应不变法的核心思想是:让离散时间滤波器的脉冲响应和已有的连续时间滤波器的脉冲响应保持“相等”。这里当然不可能相等,可以理解为,离散时间滤波器的脉冲响应是对连续时间滤波器脉冲响应的“采样”。
设计过程如下:
1,确定离散时间滤波器的技术指标。主要是通带截止频率



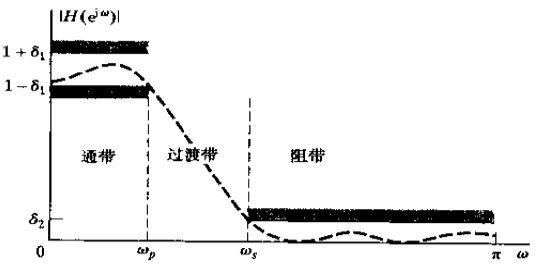
所以离散时间滤波器的技术的要求为:


2,将离散时间滤波器所要求的技术指标转换成连续时间滤波器对应的指标。
因为离散时间脉冲响应是连续时间脉冲响应的等间隔采样,所以离散时间滤波器与连续时间滤波器的脉冲响应有如下关系:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3420
3420

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









