







 本文探讨了无人机在物联网网络中,利用概率LoS信道和NOMA技术进行数据传输的建模。研究了UAV与设备间的通信路径损耗、信道增益计算以及NOMA下的数据传输策略,包括SINR计算和功率分配。重点介绍了3D放置优化和AI方法的应用,旨在提升通信效率和能源管理。
本文探讨了无人机在物联网网络中,利用概率LoS信道和NOMA技术进行数据传输的建模。研究了UAV与设备间的通信路径损耗、信道增益计算以及NOMA下的数据传输策略,包括SINR计算和功率分配。重点介绍了3D放置优化和AI方法的应用,旨在提升通信效率和能源管理。
无线信道传输模型
无人机作为一种高灵活性的移动资源,常常被用于地面设备到远程基站的数据传输中继。由于无人机和地面之间的遮挡较少,其信道是LoS的,质量较高,但是也存在NLoS。在现实场景中,我们常常不知道信道的质量条件,所以一般采用概率LoS来表示信道为LoS的概率。
概率LoS信道+OMA
信道建模
UAV与设备之间的信道增益为:

其中
β
\beta
β是大尺度衰落因子,如路径损耗和阴影衰落;h是小尺度衰落因子,如多径衰落。其中h满足其平方的期望为1。
UAV与设备之间的LoS概率表示为

C和D是描述环境的参数,
θ
\theta
θ是UAV的角度,与UAV位置和设备位置有关。
路径损耗表示为(看表达式像自由空间路径损耗)
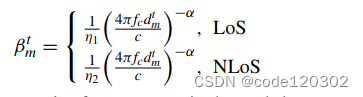
其中fc是carrier frequency,
α
\alpha
α是路径损耗指数,
η
\eta
η是在LoS和NLoS情况下的路径损耗系数,
η
\eta
η2 >
η
\eta
η1。
那么平均路径损耗为

其中
β
\beta
β0是参考距离为1m时的路径损耗,为(4
π
\pi
πfc/c)-alpha。
由此,可以计算出信道增益hmt。
传输建模
令p为设备的传输功率,那么UAV和设备之间的数据率为

概率LoS信道+NOMA
信道建模
接收机r与发送机s的信道增益为

其中a是NLoS和LoS链路的衰落分量,h是服从Nakagami-m分布的小尺度衰落因子。
其中a表示为

其中FSPL (free space path loss)表示为

这个是更为普遍的路径损耗模型(对数距离路径损耗模型)。
设备和UAV之间LoS的概率是

传输建模
在NOMA中,发射端同时发射多个设备的信号,对频谱资源进行服用,多个信号经过叠加编码技术成为混合信号,发送至接收端,接收端对混合信号采用串行干扰消除技术,进行信号的解码。信号解码顺序按照信号的发射功率从高到低进行解码,解码某个信号时,其他未解码信号作为干扰噪声,已解码信号则从混合信号中移除。这里不同设备的发射功率不同,发送端按照功率分配原则为每个信号分配不同等级的功率。
当设备向UAV发送信号,UAV收到的混合信号为
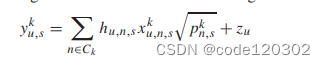
其中x代表传输信号,p代表分配的发送功率。
在UAV处解码信息的SINR (signal-to-interference-plus-noise-ratio)表示为
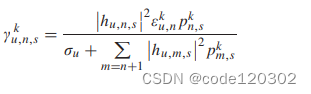
数据传输率为
r = Blog2(1 + SINR)
其中B为子信道的带宽。
——————————————————————————
参考文献:
【1】A. B. M. Adam, M. S. A. Muthanna, A. Muthanna, T. N. Nguyen and A. A. A. El-Latif, “Toward Smart Traffic Management With 3D Placement Optimization in UAV-Assisted NOMA IIoT Networks,” in IEEE Transactions on Intelligent Transportation Systems, vol. 24, no. 12, pp. 15448-15458, Dec. 2023
【2】M. Sun, X. Xu, X. Qin and P. Zhang, “AoI-Energy-Aware UAV-Assisted Data Collection for IoT Networks: A Deep Reinforcement Learning Method,” in IEEE Internet of Things Journal, vol. 8, no. 24, pp. 17275-17289, 15 Dec.15, 2021

















 644
644

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









