






AEB距离模型
考虑前车不同运动状态的AEB距离模型
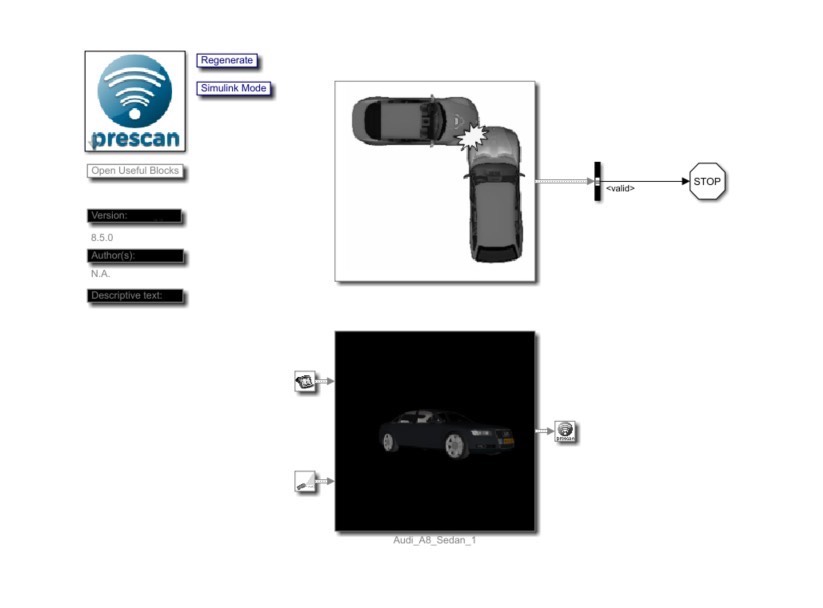
AEB-simulink距离模型
版本:prescan8.5 Matlab版本可以降
内容:
1、考虑了前车不同运动状态、驾驶员反应时间、制动器响应时间等。
针对不同运动状态搭建的距离模型。
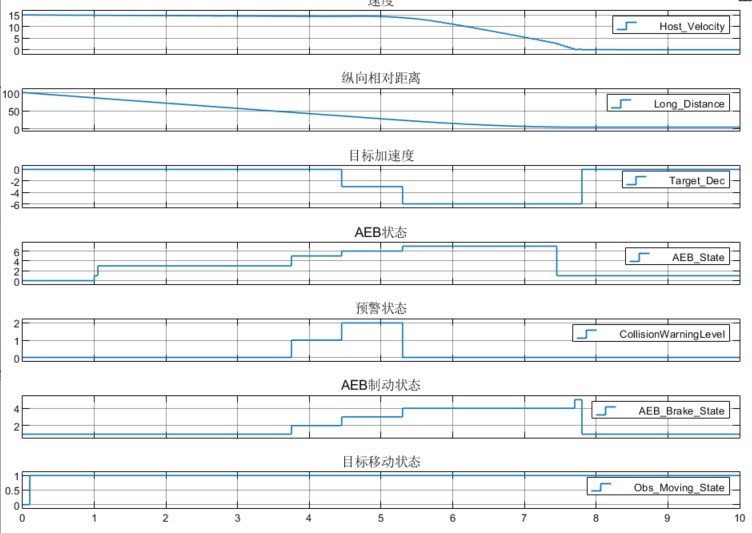
一级预警、二级预警、部分制动、紧急制动模型。
2、判断前车状态
3、判断前车位置等
无底盘控制。
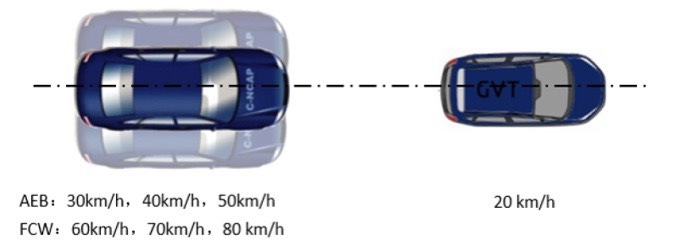
针对C- NCAP管理规则:
三个场景进行仿真:CCRs、CCRm、CCRb
有相关的测试场景说明,以及仿真结果。
以及相关参数参数说明。
ID:13100696029997310
病态中失态
AEB距离模型是一种基于车辆自动紧急制动系统(Automatic Emergency Braking System,简称AEB)的模型,通过考虑前车不同运动状态、驾驶员反应时间、制动器响应时间等因素,实现了对前车与自身车辆的距离判断和预警制动的功能。本文将主要围绕AEB距离模型展开讨论。
首先,我们需要建立一个能够考虑前车不同运动状态的距离模型。在车辆行驶过程中,前车的运动状态会对自身车辆的距离判断和预警制动产生影响。因此,我们需要针对不同的运动状态搭建相应的距离模型。这些模型可以分为一级预警、二级预警、部分制动和紧急制动模型,根据前车与自身车辆的距离和速度等参数进行相应的预警和制动动作。
其次,为了准确判断前车的状态,我们需要考虑前车的位置、速度等因素。通过对前车位置的监测和速度的测量,我们可以实时获取前车的动态信息,进而判断其运动状态。这些信息可以用来调整距离模型的参数,以提高预测的准确性和制动的效果。
在AEB距离模型的实现过程中,无底盘控制是一个重要的考虑因素。无底盘控制指的是通过车辆电子控制系统来实现对制动器的控制,提高制动的响应时间和稳定性。在AEB距离模型中,无底盘控制的应用可以加快制动器的响应时间,从而减少事故发生的可能性。
针对C-NCAP管理规则中的要求,我们需要对AEB距离模型进行仿真测试。在仿真过程中,我们可以模拟不同的场景,例如城市道路、高速公路等,以及不同的前车运动状态。通过对仿真结果的分析,可以评估AEB距离模型的性能,并对相关的参数进行调整和优化。
除了仿真测试外,我们还需要提供相关的测试场景说明和仿真结果分析。这些内容可以帮助读者更加直观地了解AEB距离模型的应用场景和性能表现。此外,还需要提供相关参数的说明,包括前车运动状态的判断参数、制动器响应时间的设定等,以便读者能够理解和应用这些参数。
综上所述,AEB距离模型是一种基于前车不同运动状态的距离模型,通过考虑驾驶员反应时间、制动器响应时间和前车位置等因素,实现了对前车与自身车辆的距离判断和预警制动的功能。在实际应用中,我们可以根据C-NCAP管理规则进行仿真测试,并对相关参数进行调整和优化,以提高AEB距离模型的性能和可靠性。希望本文能够帮助读者更加深入地了解AEB距离模型的原理和应用。
【相关代码,程序地址】:http://fansik.cn/696029997310.html
















 1346
1346

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









