






STM32采用3.3V供电,LCD2004大多5v供电,那么STM32能驱动LCD2004吗?
下面来看看LCD2004的电参数
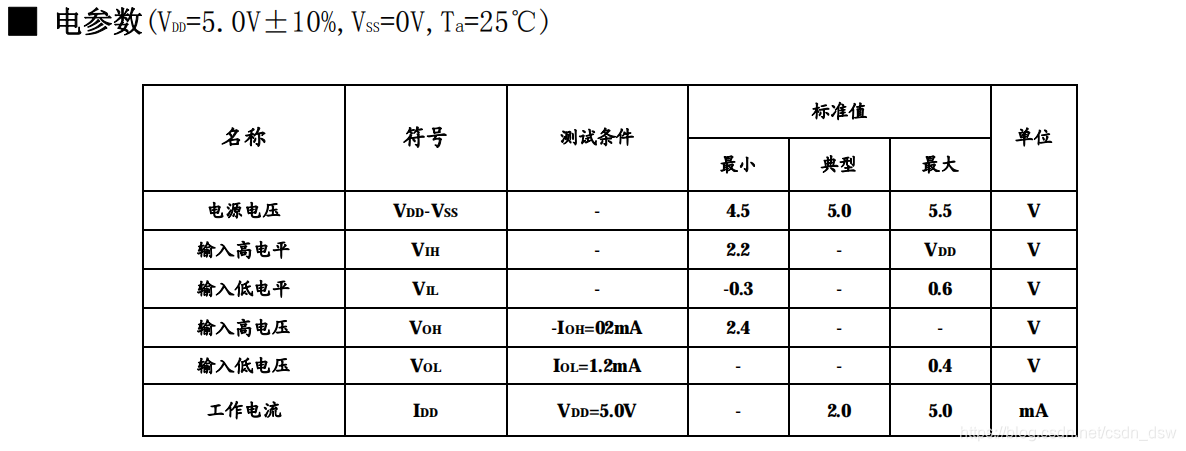
可以看到,LCD2004的输入高电平最小值在2.2V,也就是说只要高于2.2v即可被识别为高电平,STM32完全满足该电平条件,因此理论上STM32可以驱动LCD2004。
以下程序使用STM32F103C8T6单片机验证通过,采用HAL库编写。
LCD.h:该文件列出来可供用户调用的外部函数
#ifndef LCD_H
#define LCD_H
#include<stdint.h>
#include "gpio.h"
void LCD_Init(void);//LCD初始化
void LCD_Clear(void);//清屏
void LCD_BlinkOn(void);//光标所在位置闪烁开
void LCD_BlinkOff(void);//光标所在位置闪烁关
void LCD_CursorOn(void);//显示光标
void LCD_CursorOff(void);//关闭光标
void LCD_DisplayOn(void);//打开显示
void LCD_DisplayOff(void);//关闭显示
void LCD_ScrollLeft(void);
void LCD_ScrollRight(void);
void LCD_Put(uint8_t Data);
void LCD_CursorSet(uint8_t col, uint8_t row);//设置光标位置
void LCD_Puts(uint8_t x, uint8_t y, char* str);//从指定坐标(x,y)开始打印字符串str
void LCD_CreateChar(uint8_t location, uint8_t* data);//自定义字符
void LCD_PutCustom(uint8_t x, uint8_t y, uint8_t location);//在指定坐标(x,y)显示自定义字符
#endifgpio.h:
#ifndef __gpio_H
#define __gpio_H
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "LCD_Config.h"
void MX_GPIO_Init(void);
#ifdef __cplusplus
}
#endif
#endif /*__ pinoutConfig_H */LCD_Config.h:该文件定义了LCD2004与STM32的引脚连接关系,四线模式驱动,使用时需根据自己的硬件修改该头文件
#ifndef LCD_CONFIG_H
#define LCD_CONFIG_H
#include "stm32f1xx_hal.h"
#define _LCD_COLS 20
#define _LCD_ROWS 4
#define LCD_RS_Pin GPIO_PIN_8
#define LCD_RS_GPIO_Port GPIOA
#define LCD_RW_Pin GPIO_PIN_9
#define LCD_RW_GPIO_Port GPIOB
#define LCD_EN_Pin GPIO_PIN_14
#define LCD_EN_GPIO_Port GPIOB
#define LCD_D4_Pin GPIO_PIN_3
#define LCD_D4_GPIO_Port GPIOB
#define LCD_D5_Pin GPIO_PIN_4
#define LCD_D5_GPIO_Port GPIOB
#define LCD_D6_Pin GPIO_PIN_10
#define LCD_D6_GPIO_Port GPIOB
#define LCD_D7_Pin GPIO_PIN_11
#define LCD_D7_GPIO_Port GPIOB
#define _LCD_RS_PORT LCD_RS_GPIO_Port
#define _LCD_RS_PIN LCD_RS_Pin
#define _LCD_E_PORT LCD_EN_GPIO_Port
#define _LCD_E_PIN LCD_EN_Pin
#define _LCD_RW_PORT LCD_RW_GPIO_Port
#define _LCD_RW_PIN LCD_RW_Pin
#define _LCD_D4_PORT LCD_D4_GPIO_Port
#define _LCD_D4_PIN LCD_D4_Pin
#define _LCD_D5_PORT LCD_D5_GPIO_Port
#define _LCD_D5_PIN LCD_D5_Pin
#define _LCD_D6_PORT LCD_D6_GPIO_Port
#define _LCD_D6_PIN LCD_D6_Pin
#define _LCD_D7_PORT LCD_D7_GPIO_Port
#define _LCD_D7_PIN LCD_D7_Pin
#endif
gpio.c:包含引脚初始化相关代码
/* Includes ------------------------------------------------------------------*/
#include "gpio.h"
/*----------------------------------------------------------------------------*/
/* Configure GPIO */
/*----------------------------------------------------------------------------*/
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef gpio;
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
gpio.Mode = GPIO_MODE_OUTPUT_PP;
gpio.Speed = GPIO_SPEED_FREQ_HIGH;
gpio.Pull = GPIO_NOPULL;
gpio.Pin = _LCD_RS_PIN;
HAL_GPIO_Init(_LCD_RS_PORT,&gpio);
gpio.Pin = _LCD_E_PIN;
HAL_GPIO_Init(_LCD_E_PORT,&gpio);
gpio.Pin = _LCD_RW_PIN;
HAL_GPIO_Init(_LCD_RW_PORT,&gpio);
gpio.Pin = _LCD_D4_PIN;
HAL_GPIO_Init(_LCD_D4_PORT,&gpio);
gpio.Pin = _LCD_D5_PIN;
HAL_GPIO_Init(_LCD_D5_PORT,&gpio);
gpio.Pin = _LCD_D6_PIN;
HAL_GPIO_Init(_LCD_D6_PORT,&gpio);
gpio.Pin = _LCD_D7_PIN;
HAL_GPIO_Init(_LCD_D7_PORT,&gpio);
}
LCD.c:LCD2004驱动相关代码,一般无需修改
#include "LCD.h"
//############################################################################################
typedef struct {
uint8_t DisplayControl;
uint8_t DisplayFunction;
uint8_t DisplayMode;
uint8_t currentX;
uint8_t currentY;
} LCD_Options_t;
//############################################################################################
/* Private functions */
static void LCD_Cmd(uint8_t cmd);
static void LCD_Cmd4bit(uint8_t cmd);
static void LCD_Data(uint8_t data);
//############################################################################################
/* Private variable */
static LCD_Options_t LCD_Opts;
//############################################################################################
/* Pin definitions */
#define LCD_RS_LOW HAL_GPIO_WritePin(_LCD_RS_PORT, _LCD_RS_PIN,GPIO_PIN_RESET)
#define LCD_RS_HIGH HAL_GPIO_WritePin(_LCD_RS_PORT, _LCD_RS_PIN,GPIO_PIN_SET)
#define LCD_E_LOW HAL_GPIO_WritePin(_LCD_E_PORT, _LCD_E_PIN,GPIO_PIN_RESET)
#define LCD_E_HIGH HAL_GPIO_WritePin(_LCD_E_PORT, _LCD_E_PIN,GPIO_PIN_SET)
#define LCD_E_BLINK LCD_E_HIGH; LCD_Delay_us(50); LCD_E_LOW; LCD_Delay_us(50)
//############################################################################################
/* Commands*/
#define LCD_CLEARDISPLAY 0x01
#define LCD_RETURNHOME 0x02
#define LCD_ENTRYMODESET 0x04
#define LCD_DISPLAYCONTROL 0x08
#define LCD_CURSORSHIFT 0x10
#define LCD_FUNCTIONSET 0x20
#define LCD_SETCGRAMADDR 0x40
#define LCD_SETDDRAMADDR 0x80
/* Flags for display entry mode */
#define LCD_ENTRYRIGHT 0x00
#define LCD_ENTRYLEFT 0x02
#define LCD_ENTRYSHIFTINCREMENT 0x01
#define LCD_ENTRYSHIFTDECREMENT 0x00
/* Flags for display on/off control */
#define LCD_DISPLAYON 0x04
#define LCD_CURSORON 0x02
#define LCD_BLINKON 0x01
/* Flags for display/cursor shift */
#define LCD_DISPLAYMOVE 0x08
#define LCD_CURSORMOVE 0x00
#define LCD_MOVERIGHT 0x04
#define LCD_MOVELEFT 0x00
/* Flags for function set */
#define LCD_8BITMODE 0x10
#define LCD_4BITMODE 0x00
#define LCD_2LINE 0x08
#define LCD_1LINE 0x00
#define LCD_5x10DOTS 0x04
#define LCD_5x8DOTS 0x00
//############################################################################################
void LCD_Delay_us(uint16_t us)
{
uint32_t Div = (SysTick->LOAD+1)/1000;
uint32_t StartMicros = HAL_GetTick()*1000 + (1000- SysTick->VAL/Div);
while((HAL_GetTick()*1000 + (1000-SysTick->VAL/Div)-StartMicros < us));
}
//############################################################################################
void LCD_Delay_ms(uint8_t ms)
{
HAL_Delay(ms);
}
//############################################################################################
void LCD_Init(void)
{
while(HAL_GetTick()<200)
LCD_Delay_ms(1);
/* Set cursor pointer to beginning for LCD */
LCD_Opts.currentX = 0;
LCD_Opts.currentY = 0;
LCD_Opts.DisplayFunction = LCD_4BITMODE | LCD_5x8DOTS | LCD_1LINE;
if (_LCD_ROWS > 1)
LCD_Opts.DisplayFunction |= LCD_2LINE;
/* Try to set 4bit mode */
LCD_Cmd4bit(0x03);
LCD_Delay_ms(5);
/* Second try */
LCD_Cmd4bit(0x03);
LCD_Delay_ms(5);
/* Third goo! */
LCD_Cmd4bit(0x03);
LCD_Delay_ms(5);
/* Set 4-bit interface */
LCD_Cmd4bit(0x02);
LCD_Delay_ms(5);
/* Set # lines, font size, etc. */
LCD_Cmd(LCD_FUNCTIONSET | LCD_Opts.DisplayFunction);
/* Turn the display on with no cursor or blinking default */
LCD_Opts.DisplayControl = LCD_DISPLAYON;
LCD_DisplayOn();
LCD_Clear();
/* Default font directions */
LCD_Opts.DisplayMode = LCD_ENTRYLEFT | LCD_ENTRYSHIFTDECREMENT;
LCD_Cmd(LCD_ENTRYMODESET | LCD_Opts.DisplayMode);
LCD_Delay_ms(5);
}
//############################################################################################
void LCD_Clear(void)
{
LCD_Cmd(LCD_CLEARDISPLAY);
LCD_Delay_ms(5);
}
//############################################################################################
void LCD_Puts(uint8_t x, uint8_t y, char* str)
{
LCD_CursorSet(x, y);
while (*str)
{
if (LCD_Opts.currentX >= _LCD_COLS)
{
LCD_Opts.currentX = 0;
LCD_Opts.currentY++;
LCD_CursorSet(LCD_Opts.currentX, LCD_Opts.currentY);
}
if (*str == '\n')
{
LCD_Opts.currentY++;
LCD_CursorSet(LCD_Opts.currentX, LCD_Opts.currentY);
}
else if (*str == '\r')
{
LCD_CursorSet(0, LCD_Opts.currentY);
}
else
{
LCD_Data(*str);
LCD_Opts.currentX++;
}
str++;
}
}
//############################################################################################
void LCD_DisplayOn(void)
{
LCD_Opts.DisplayControl |= LCD_DISPLAYON;
LCD_Cmd(LCD_DISPLAYCONTROL | LCD_Opts.DisplayControl);
}
//############################################################################################
void LCD_DisplayOff(void)
{
LCD_Opts.DisplayControl &= ~LCD_DISPLAYON;
LCD_Cmd(LCD_DISPLAYCONTROL | LCD_Opts.DisplayControl);
}
//############################################################################################
void LCD_BlinkOn(void)
{
LCD_Opts.DisplayControl |= LCD_BLINKON;
LCD_Cmd(LCD_DISPLAYCONTROL | LCD_Opts.DisplayControl);
}
//############################################################################################
void LCD_BlinkOff(void)
{
LCD_Opts.DisplayControl &= ~LCD_BLINKON;
LCD_Cmd(LCD_DISPLAYCONTROL | LCD_Opts.DisplayControl);
}
//############################################################################################
void LCD_CursorOn(void)
{
LCD_Opts.DisplayControl |= LCD_CURSORON;
LCD_Cmd(LCD_DISPLAYCONTROL | LCD_Opts.DisplayControl);
}
//############################################################################################
void LCD_CursorOff(void)
{
LCD_Opts.DisplayControl &= ~LCD_CURSORON;
LCD_Cmd(LCD_DISPLAYCONTROL | LCD_Opts.DisplayControl);
}
//############################################################################################
void LCD_ScrollLeft(void)
{
LCD_Cmd(LCD_CURSORSHIFT | LCD_DISPLAYMOVE | LCD_MOVELEFT);
}
//############################################################################################
void LCD_ScrollRight(void)
{
LCD_Cmd(LCD_CURSORSHIFT | LCD_DISPLAYMOVE | LCD_MOVERIGHT);
}
//############################################################################################
void LCD_CreateChar(uint8_t location, uint8_t *data)
{
uint8_t i;
/* We have 8 locations available for custom characters */
location &= 0x07;
LCD_Cmd(LCD_SETCGRAMADDR | (location << 3));
for (i = 0; i < 8; i++) {
LCD_Data(data[i]);
}
}
//############################################################################################
void LCD_PutCustom(uint8_t x, uint8_t y, uint8_t location)
{
LCD_CursorSet(x, y);
LCD_Data(location);
}
//############################################################################################
static void LCD_Cmd(uint8_t cmd)
{
LCD_RS_LOW;
LCD_Cmd4bit(cmd >> 4);
LCD_Cmd4bit(cmd & 0x0F);
}
//############################################################################################
static void LCD_Data(uint8_t data)
{
LCD_RS_HIGH;
LCD_Cmd4bit(data >> 4);
LCD_Cmd4bit(data & 0x0F);
}
//############################################################################################
static void LCD_Cmd4bit(uint8_t cmd)
{
HAL_GPIO_WritePin(_LCD_D7_PORT, _LCD_D7_PIN, (GPIO_PinState)(cmd & 0x08));
HAL_GPIO_WritePin(_LCD_D6_PORT, _LCD_D6_PIN, (GPIO_PinState)(cmd & 0x04));
HAL_GPIO_WritePin(_LCD_D5_PORT, _LCD_D5_PIN, (GPIO_PinState)(cmd & 0x02));
HAL_GPIO_WritePin(_LCD_D4_PORT, _LCD_D4_PIN, (GPIO_PinState)(cmd & 0x01));
LCD_E_BLINK;
}
//############################################################################################
void LCD_CursorSet(uint8_t col, uint8_t row)
{
uint8_t row_offsets[] = {0x00, 0x40, 0x14, 0x54};
if (row >= _LCD_ROWS)
row = 0;
LCD_Opts.currentX = col;
LCD_Opts.currentY = row;
LCD_Cmd(LCD_SETDDRAMADDR | (col + row_offsets[row]));
}
//############################################################################################
void LCD_Put(uint8_t Data)
{
LCD_Data(Data);
}
//############################################################################################
main.c:包含main主函数,测试显示效果
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "LCD.h"
void SystemClock_Config(void);
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
LCD_Init();
LCD_Puts(0,0,"!@#$%^&*()-+=_[]<>?/");
LCD_Puts(0,1,"0123456789ABCDEFGHIJ");
LCD_Puts(0,2,"22222222222222222222");
LCD_Puts(0,3,"33333333333333333333");
while (1)
{
LCD_BlinkOn();
HAL_Delay(5000);
LCD_BlinkOff();
HAL_Delay(5000);
}
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief Period elapsed callback in non blocking mode
* @note This function is called when TIM4 interrupt took place, inside
* HAL_TIM_IRQHandler(). It makes a direct call to HAL_IncTick() to increment
* a global variable "uwTick" used as application time base.
* @param htim : TIM handle
* @retval None
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
/* USER CODE BEGIN Callback 0 */
/* USER CODE END Callback 0 */
if (htim->Instance == TIM4) {
HAL_IncTick();
}
/* USER CODE BEGIN Callback 1 */
/* USER CODE END Callback 1 */
}
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
显示效果:


















 1987
1987

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









