







前言
本文基于Mxnet实现SMOT,多目标跟踪算法,这里先使用COCO数据集的目标检测检测对象,然后在使用SMOT进行目标跟踪
一、多目标定位的类的实现
class GluonSSDMultiClassTracktor(BaseAnchorBasedTracktor):
def __init__(self, gpu_id=0, detector_thresh=0.5, model_name="", use_pretrained=False, param_path="", data_shape=512,classes=[]):
self.detector = GeneralDetector(gpu_id, aspect_ratio=1., data_shape=data_shape, model_name=model_name, use_pretrained=use_pretrained, param_path=param_path,classes = classes)
self._anchor_tensor = None
self._detector_thresh = detector_thresh
self._ctx = mx.gpu(gpu_id)
self._dummy_ti = mx.nd.array([[0]], ctx=self._ctx)
def anchors(self):
if self.detector.anchor_tensor is None:
raise ValueError("anchor not initialized yet")
return self.detector.anchor_tensor
def clean_up(self):
pass
def prepare_for_frame(self, frame):
return None
@timeit
def detect_and_track(self, frame, tracking_anchor_indices, tracking_anchor_weights, tracking_object_classes):
with_tracking = len(tracking_anchor_indices) > 0
if with_tracking:
tracking_indices = mx.nd.array(tracking_anchor_indices, ctx=self._ctx)
tracking_weights = mx.nd.array(tracking_anchor_weights, ctx=self._ctx)
tracking_classes = mx.nd.array(tracking_object_classes.reshape((-1, 1)), ctx=self._ctx)
else:
tracking_classes = tracking_indices = tracking_weights = self._dummy_ti
ids, scores, bboxes, voted_tracking_bboxes, detection_anchor_indices = self.detector.run_detection(frame, tracking_indices, tracking_weights, tracking_classes)
valid_det_num = (scores > self._detector_thresh).sum().astype(int).asnumpy()[0]
if valid_det_num > 0:
valid_scores = scores[:valid_det_num]
valid_bboxes = bboxes[:valid_det_num, :]
valid_classes = ids[:valid_det_num, :]
detection_output = mx.nd.concat(valid_bboxes, valid_scores, valid_classes, dim=1).asnumpy()
anchor_indices_output = detection_anchor_indices[:valid_det_num, :]
else:
detection_output = np.array([])
anchor_indices_output = np.array([])
tracking_response = voted_tracking_bboxes.asnumpy() if with_tracking else np.array([])
return detection_output, anchor_indices_output, tracking_response, {}
这里引入的是COCO数据集的已经训练好的目标检测的模型
二、引入SMOT跟踪类
class SMOTTracker:
def __init__(self,
motion_model='no',
anchor_array=None,
use_motion=True,
tracking_classes=[],
match_top_k=10,
track_keep_alive_thresh=0.1,
new_track_iou_thresh=0.3,
track_nms_thresh=0.5,
gpu_id=0,
anchor_assignment_method='iou',
joint_linking=False,
tracktor=None,classes=[]
):
self.use_motion = use_motion
self.tracks = []
self.all_track_id = 0
self.pending_index = []
self.conf_score_thresh = 0.1
self.anchor_array = anchor_array
self.next_frame_pred_index = []
self.next_frame_pred_weights = []
self.next_frame_pred_bbox = []
self.waiting_update_tracks = []
self.next_frame_ref_bbox = []
self.last_frame = None
self.k = match_top_k
self.keep_alive = track_keep_alive_thresh
self.new_track_iou_thresh = new_track_iou_thresh
self.track_nms_thresh = track_nms_thresh
self.frame_cache = None
self.mx_ctx = mx.gpu(gpu_id)
self.anchor_assignment_method = anchor_assignment_method
self.joint_linking = joint_linking
if len(tracking_classes) == 0:
raise ValueError("Unknown tracking classes, please let us know what object you want to track")
self.coco_class_set = set(classes)
self.coco_class2index_dict = {i:name for i, name in enumerate(classes)}
self.class_set = set(tracking_classes)
for class_name in tracking_classes:
if class_name not in self.coco_class_set:
raise ValueError("Your cunstom class {} is not supported, only COCO classes are currently supported,\
the classes are {}".format(class_name, classes))
if motion_model == 'farneback':
self.motion_estimator = FarneBeckFlowMotionEstimator()
elif motion_model == 'no':
self.motion_estimator = DummyMotionEstimator()
else:
raise ValueError("Unknown motion model: {}".format(motion_model))
def process_frame_sequence(self, frame_iterator, tracktor):
for frame_id, frame in frame_iterator:
print('Processing Frame ID: {}'.format(frame_id))
t_iter_start = time.time()
# STEP 0: Prepare the tracktor with the new frame data
motion_pred_data = tracktor.prepare_for_frame(frame)
# STEP 1: Predict the new locations of the tracked bounding boxes in the tracker
tracking_anchor_indices, tracking_anchor_weights, tracking_classes = self.motion_predict(frame, motion_pred_data)
# STEP 2: Run the tracktor
detection_bboxes, detection_anchor_indices, tracking_bboxes, extra_info \
= tracktor.detect_and_track(frame,
tracking_anchor_indices,
tracking_anchor_weights,
tracking_classes
)
if self.anchor_array is None:
self.set_anchor_array(tracktor.anchors())
# STEP 3: Update the tracker with detector responses
self.update(detection_bboxes,
tracking_bboxes,
detection_anchor_indices,
tracking_anchor_indices,
tracking_anchor_weights,
tracking_classes,
extra_info)
# yield the results of this frame
results = self._produce_frame_result()
elapsed = time.time() - t_iter_start
print("Total Tracking Runtime: {:2.4f} msec, {:.01f} FPS".format(elapsed * 1000, 1 / elapsed))
yield frame_id, results
@timeit
def set_anchor_array(self, anchor_arracy):
self.anchor_array = anchor_arracy
self.anchor_tensor = mx.nd.array(self.anchor_array, ctx=self.mx_ctx, dtype=np.float32)
@timeit
def motion_predict(self, new_frame: np.ndarray, motion_pred_data):
# STEP 1: Find all active tracks
active_track_boxes = []
active_track_indices = []
active_track_anchor_indices = []
active_track_anchor_weights = []
active_track_classes = []
t_active = time.time()
for track_idx, track in enumerate(self.tracks):
if track.is_active():
active_track_boxes.append(track.mean)
active_track_indices.append(track_idx)
src_idx, src_weights = track.source
active_track_anchor_indices.append(src_idx)
active_track_anchor_weights.append(src_weights)
active_track_classes.append([track.class_id])
print("active track {} with age: {}".format(track.track_id, track.age))
active_track_boxes = np.array(active_track_boxes)
active_track_anchor_indices = np.array(active_track_anchor_indices)
active_track_anchor_weights = np.array(active_track_anchor_weights)
e_active = time.time() - t_active
print('find active runtime: {:.05f}'.format(e_active))
if len(active_track_boxes) > 0:
# The following steps only happen if we have something to track
# STEP 2: Warp the boxes according to flow
predicted_track_boxes = self._motion_prediction(new_frame, active_track_boxes,
active_track_anchor_indices,
active_track_anchor_weights,
motion_pred_data,
skip=not self.use_motion)
# STEP 3: Assign the warped boxes to anchor compositions
tracking_anchor_indices, tracking_anchor_weights, tracking_anchor_validity = self._assign_box_to_anchors(
predicted_track_boxes, method=self.anchor_assignment_method)
# remove tracks becoming invalid after motion prediction
invalid_track_numbers = np.nonzero(1 - tracking_anchor_validity)[0]
print("{}/{} tracks become invalid after motion prediction".format(len(invalid_track_numbers), len(active_track_boxes)))
for i_invalid in invalid_track_numbers:
self.tracks[active_track_indices[i_invalid]].mark_missed()
# keep the valid tracks for re-detection
valid_track_numbers = np.nonzero(tracking_anchor_validity)[0]
self.next_frame_pred_index = tracking_anchor_indices[valid_track_numbers, ...]
self.next_frame_pred_weights = tracking_anchor_weights[valid_track_numbers, ...]
self.next_frame_pred_bbox = predicted_track_boxes[valid_track_numbers, ...]
self.next_frame_pred_class = np.array(active_track_classes)[valid_track_numbers, ...]
active_track_indices = np.array(active_track_indices)[valid_track_numbers, ...]
active_track_boxes = active_track_boxes[valid_track_numbers, ...]
else:
# skip flow computation if there is no active track
# just save the frame in cache
predicted_track_boxes = self._motion_prediction(new_frame,
active_track_boxes,
active_track_anchor_indices, active_track_anchor_weights,
motion_pred_data, skip=True)
assert len(predicted_track_boxes) == 0
self.next_frame_pred_index = np.array([])
self.next_frame_pred_weights = np.array([])
self.next_frame_pred_bbox = np.array([])
self.next_frame_pred_class = np.array([])
self.waiting_update_tracks = active_track_indices
self.next_frame_ref_bbox = active_track_boxes
return self.next_frame_pred_index, self.next_frame_pred_weights, self.next_frame_pred_class
@timeit
def update(self, new_detections: np.ndarray, tracking_predictions: np.ndarray,
detection_anchor_indices: np.ndarray,
tracking_anchor_indices: np.ndarray, tracking_anchor_weights: np.ndarray,
tracking_classes: np.ndarray,
extra_info: dict = None):
# pylint: disable=too-many-nested-blocks
t_pose_processing = time.time()
print("tracking predictions 's shape is {}".format(tracking_predictions.shape))
print(tracking_predictions)
print(self.waiting_update_tracks)
detection_landmarks = extra_info['detection_landmarks'] if 'detection_landmarks' in extra_info else None
tracking_landmarks = extra_info['tracking_landmarks'] if 'tracking_landmarks' in extra_info else None
for t in self.tracks:
t.predict()
# STEP 1: track level NMS
still_active_track_pred_indices = []
still_active_track_indices = []
if len(tracking_predictions) > 0:
# class wise NMS
keep_set = set()
for c in set(tracking_classes.ravel().tolist()):
class_pick = np.nonzero(tracking_classes == c)[0]
keep_tracking_pred_nms_indices = nms_fallback(tracking_predictions[class_pick, ...], self.track_nms_thresh)
for i_keep in keep_tracking_pred_nms_indices:
keep_set.add(class_pick[i_keep])
still_active_track_pred_indices = []
for i_pred, i_track in enumerate(self.waiting_update_tracks):
if i_pred in keep_set:
self.tracks[i_track].update(tracking_predictions[i_pred, :],
(tracking_anchor_indices[i_pred, :], tracking_anchor_weights[i_pred, :]),
tracking_landmarks[i_pred, :] if tracking_landmarks is not None else None)
else:
# suppressed tracks in the track NMS process will be marked as Missing
self.tracks[i_track].mark_missed()
if self.tracks[i_track].is_active():
still_active_track_pred_indices.append(i_pred)
still_active_track_indices.append(i_track)
# STEP 2: Remove New Detection Overlapping with Tracks
if len(still_active_track_pred_indices) > 0 and len(new_detections) > 0:
active_tracking_predictions = tracking_predictions[still_active_track_pred_indices, :]
det_track_max_iou = bbox_iou(new_detections[:, :4], active_tracking_predictions[:, :4])
same_class = new_detections[:, -1:] == (tracking_classes[still_active_track_pred_indices, :].T)
# suppress all new detections that have high IOU with active tracks
affinity = (det_track_max_iou * same_class).max(axis=1)
keep_detection_indices = np.nonzero(affinity <= self.new_track_iou_thresh)[0]
else:
# otherwise simply keep all detections
keep_detection_indices = list(range(len(new_detections)))
active_tracking_predictions = np.array([])
# STEP 3: New Track Initialization
if len(keep_detection_indices) > 0:
active_new_detections = new_detections[keep_detection_indices, :]
# (Optional) STEP 3.a: Perform joint linking of body and head
if self.joint_linking:
tracking_classes = np.array(tracking_classes)
body2face_link, face2body_link = \
self._link_face_body(active_new_detections,
extra_info['detection_keypoints'][keep_detection_indices],
active_tracking_predictions,
extra_info['tracking_keypoints'][still_active_track_pred_indices],
tracking_classes[still_active_track_pred_indices]
)
else:
body2face_link, face2body_link = None, None
new_tracks = []
for idx, i_new_track in enumerate(keep_detection_indices):
new_track = Track(new_detections[i_new_track, :4], self.all_track_id,
(detection_anchor_indices[i_new_track, :], np.array([1])),
keep_alive_thresh=self.keep_alive, class_id=new_detections[i_new_track, -1],
attributes=detection_landmarks[i_new_track, :] if detection_landmarks is not None else None)
if self.joint_linking:
if new_track.class_id == 0:
# new face track
if idx in face2body_link[0]:
print(idx, i_new_track, '0')
body_idx = face2body_link[0][idx]
if idx > body_idx:
new_track.link_to(new_tracks[body_idx])
elif idx in face2body_link[2]:
print(idx, i_new_track, '1')
body_idx = face2body_link[2][idx]
new_track.link_to(self.tracks[still_active_track_indices[body_idx]])
if new_track.class_id == 1:
# new body track
if idx in body2face_link[0]:
face_idx = body2face_link[0][idx]
if idx > face_idx:
new_track.link_to(new_tracks[face_idx])
elif idx in body2face_link[2]:
face_idx = body2face_link[2][idx]
new_track.link_to(self.tracks[still_active_track_indices[face_idx]])
self.all_track_id += 1
self.tracks.append(new_track)
new_tracks.append(new_track)
elapsed_post_processing = time.time() - t_pose_processing
print("total tracklets to now is {}, post-processing time: {:.05f} sec".format(
self.all_track_id, elapsed_post_processing))
@property
def active_tracks(self):
for t in self.tracks:
if t.is_active():
yield t
def _motion_prediction(self, new_frame, tracked_boxes,
tracked_boxes_anchor_indices, tracked_boxes_anchor_weights,
motion_pred_data, skip=False):
if self.frame_cache is None:
# this is the first frame
self.frame_cache = self.motion_estimator.initialize(new_frame, motion_pred_data)
predicted_bboxes = tracked_boxes
else:
# this is not the first frame
predicted_bboxes, self.frame_cache = self.motion_estimator.predict_new_locations(
self.frame_cache, tracked_boxes, new_frame, motion_pred_data,
tracked_boxes_anchor_indices=tracked_boxes_anchor_indices,
tracked_boxes_anchor_weights=tracked_boxes_anchor_weights,
skip=skip)
return predicted_bboxes
def _assign_box_to_anchors(self, boxes: np.ndarray, method: str = 'avg', min_anchor_iou: float = 0.1):
t_start = time.time()
t_iou = time.time()
gpu_boxes = mx.nd.array(boxes, ctx=self.mx_ctx)
anchor_track_iou = gpu_iou(self.anchor_tensor, gpu_boxes)
elapsed_iou = time.time() - t_iou
print("iou computation runtime: {:.05f}".format(elapsed_iou))
# get the top-k closest anchors instead of 1
if method == 'max':
tracking_anchor_ious, tracking_anchor_indices = mx.nd.topk(anchor_track_iou, axis=0, k=1,
ret_typ='both', dtype='int32')
tracking_anchor_ious = tracking_anchor_ious.T.asnumpy()
tracking_anchor_indices = tracking_anchor_indices.T.asnumpy()
tracking_anchor_weights = np.ones_like(tracking_anchor_indices)
elif method == 'avg':
tracking_anchor_ious, tracking_anchor_indices = mx.nd.topk(anchor_track_iou, axis=0, k=self.k,
ret_typ='both', dtype='int32')
tracking_anchor_ious = tracking_anchor_ious.T.asnumpy()
tracking_anchor_indices = tracking_anchor_indices.T.asnumpy()
tracking_anchor_weights = np.ones_like(tracking_anchor_indices) / self.k
elif method == 'iou':
t_sort = time.time()
tracking_anchor_ious, tracking_anchor_indices = mx.nd.topk(anchor_track_iou, axis=0, k=self.k,
ret_typ='both', dtype='int32')
tracking_anchor_ious = tracking_anchor_ious.T.asnumpy()
tracking_anchor_indices = tracking_anchor_indices.T.asnumpy()
e_sort = time.time() - t_sort
print('sorting time: {:.05f}'.format(e_sort))
tracking_anchor_weights = tracking_anchor_ious / tracking_anchor_ious.sum(axis=1)[..., None]
else:
raise ValueError("unknown anchor assignment method")
max_track_anchor_ious = tracking_anchor_ious.max(axis=1)
tracking_anchor_validity = max_track_anchor_ious >= min_anchor_iou
elapsed_assign = time.time() - t_start
print("assigment runtime: {}".format(elapsed_assign))
return tracking_anchor_indices, tracking_anchor_weights, tracking_anchor_validity
@timeit
def _produce_frame_result(self):
tracked_objects = []
for track in self.active_tracks:
box = {
'left': track.mean[0],
'top': track.mean[1],
'width': track.mean[2] - track.mean[0],
'height': track.mean[3] - track.mean[1]
}
tid = track.display_id
age = track.age
classId = track.class_id
obj = {
'bbox': box,
'track_id': tid,
'age': age,
'class_id':classId,
'class_name':self.coco_class2index_dict[classId]
}
if track.attributes is not None:
obj['landmarks'] = track.attributes
if obj["class_name"] in self.class_set:
tracked_objects.append(obj)
return tracked_objects
三、调用方式
tracktor = GluonSSDMultiClassTracktor(gpu_id=0, detector_thresh=0.2, model_name='ssd_512_vgg16_atrous_coco', use_pretrained=True, param_path="", data_shape=512,classes = classes_names)
tracker = SMOTTracker(match_top_k=5,
motion_model='farneback',
use_motion=True,
tracking_classes=["person"],
anchor_assignment_method='iou',
track_keep_alive_thresh=0.3,classes=classes_names)
效果图:

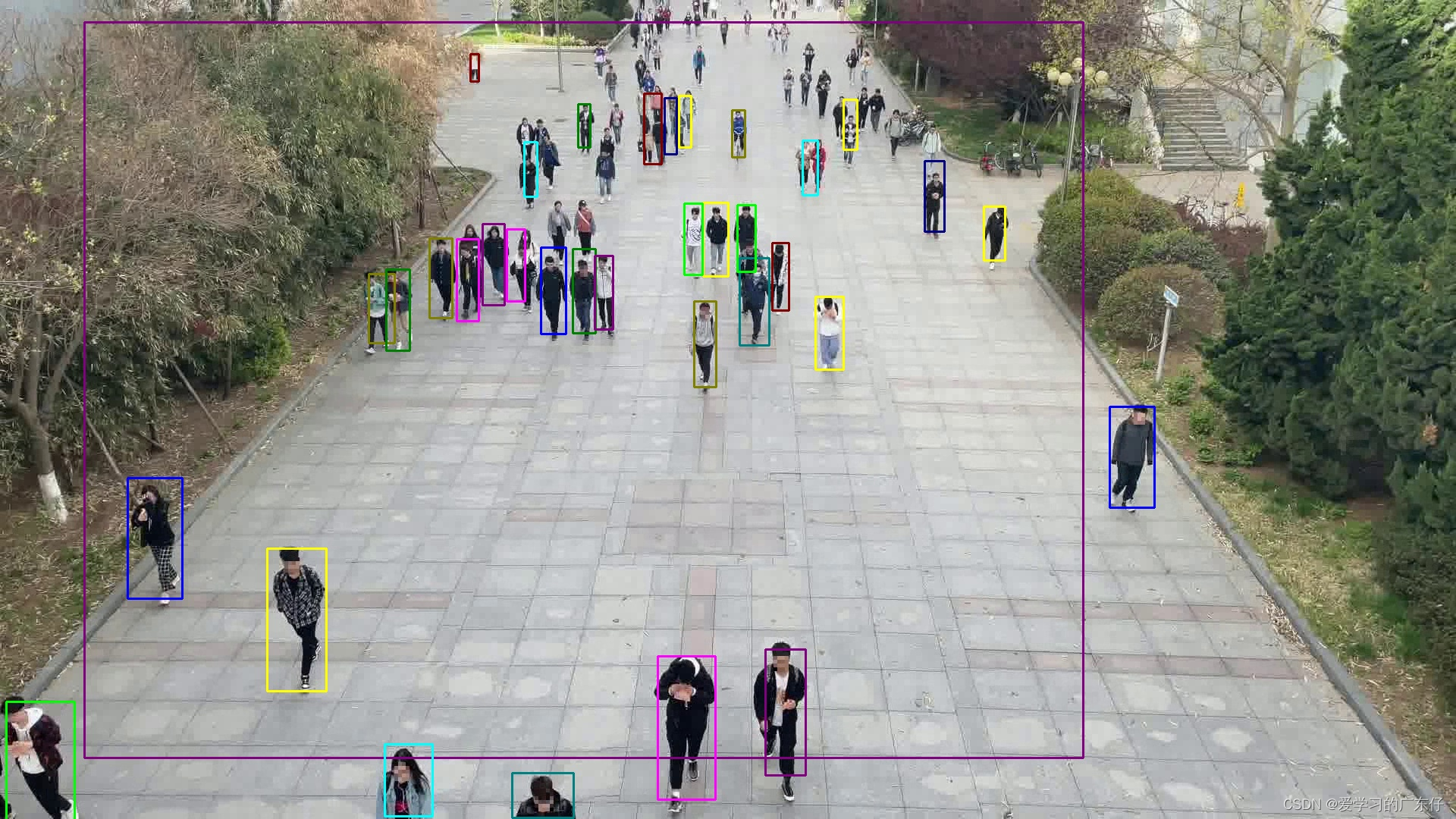
同一颜色代表同一目标
















 2871
2871











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











