







 本文介绍了基于霍夫森林的概率目标检测方法,通过概率图模型改进广义霍夫变换,使得投票元素根据其对目标的影响权重不同。利用随机森林构建决策树,通过对图像块(patch)的投票来估计目标的重心。尽管这种方法能有效检测目标重心,但对不同尺度和比例的目标可能需要额外参数。霍夫森林方法依赖于随机森林的概率输出,未来可以探索减少两者耦合度并扩展到其他概率获取方式。
本文介绍了基于霍夫森林的概率目标检测方法,通过概率图模型改进广义霍夫变换,使得投票元素根据其对目标的影响权重不同。利用随机森林构建决策树,通过对图像块(patch)的投票来估计目标的重心。尽管这种方法能有效检测目标重心,但对不同尺度和比例的目标可能需要额外参数。霍夫森林方法依赖于随机森林的概率输出,未来可以探索减少两者耦合度并扩展到其他概率获取方式。
基于霍夫森林的目标检测
上节说了霍夫变换(HT)和广义霍夫变换(GHT),今天就接着广义霍夫变换说下去,在广义霍夫变换中,每个投票元素(比如边缘像素中的点)在霍夫空间中累加投票的权重是相等的,每个元素投票的权重互不影响,这其实是假设了图像空间中的每个像素点是独立的,但现实是这样的吗?答案:不是,尤其是牵扯到我们今天的基于部件的投票时,这种投票元素互相独立的观点更站不脚,学过概率图模型(probabilistic graphic model)的都知道,图模型里有一种V结构,如(图一)所示:
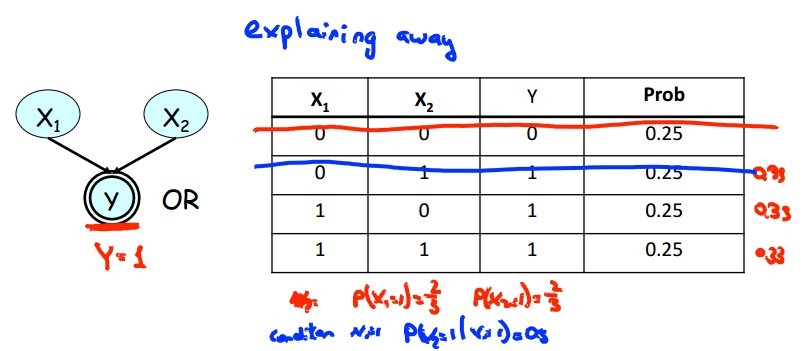
(图一)
X1,X2是投票元素,Y是我们在霍夫空间中的投票,假设我们观察Y时,或者说给定Y时,就是观察图像空间中的目标,假设X1和X2是目标生成的,X1和X2是独立的吗?很明显不是,这些元素应该向Y投票
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1238
1238

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









