







Goal
在本教程中,您将学习:
运动模糊图像(motion blur image)的 PSF 是什么
如何恢复运动模糊图像restore a motion blur image
Theory
对于退化图像模型理论(degradation image model theory)和 Wiener 滤波器理论( Wiener filter theory ),您可以参考教程 Out-of-focus Deblur Filter。 在此页面上,仅考虑线性运动模糊失真( linear motion blur distortion)。 此页面上的运动模糊图像是真实世界的图像。 模糊是由移动的主体引起的。
What is the PSF of a motion blur image?
线性运动模糊失真的点扩散函数(PSF)是一条线段。 这样的 PSF 由两个参数指定:LEN 是模糊的长度,THETA 是运动的角度。

Point spread function of a linear motion blur distortion
线性运动模糊失真的点扩散函数
How to restore a blurred image?
如何恢复模糊的图像?
本页使用维纳滤镜作为还原滤镜,详细内容可以参考教程失焦去模糊滤镜。 为了针对运动模糊情况合成维纳滤波器,需要指定 PSF 的信噪比 (SNR)、LEN 和 THETA。
Source code
您可以在 OpenCV 源代码库的 samples/cpp/tutorial_code/ImgProc/motion_deblur_filter/motion_deblur_filter.cpp 中找到源代码。
/**
* @brief You will learn how to recover an image with motion blur distortion using a Wiener filter
* 您将学习如何使用维纳滤波器恢复具有运动模糊失真的图像
* @author Karpushin Vladislav, karpushin@ngs.ru, https://github.com/VladKarpushin
*/
#include <iostream>
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
using namespace cv;
using namespace std;
void help();
void calcPSF(Mat& outputImg, Size filterSize, int len, double theta); //计算点扩散图像
void fftshift(const Mat& inputImg, Mat& outputImg);//傅里叶之后得到的结果频率范围是0到fs,为了便于进行频率域滤波,也便于观察频谱信息 ,通常将频率范围调整至-fs/2到fs/2,这样就将零频分量(直流分量)迁移到了图像中心,呈现的效果就是中心低频信息,四周外围是高频信息,这个实现我们就称为fftshift。
void filter2DFreq(const Mat& inputImg, Mat& outputImg, const Mat& H);//频域滤波后输出时域图像
void calcWnrFilter(const Mat& input_h_PSF, Mat& output_G, double nsr);//计算维纳滤波器
void edgetaper(const Mat& inputImg, Mat& outputImg, double gamma = 5.0, double beta = 0.2);//使输入图像的边缘逐渐变细,以减少恢复图像中的振铃效应
const String keys =
"{help h usage ? | | print this message }"
"{image |input.png | input image name }"
"{LEN |125 | length of a motion }"
"{THETA |0 | angle of a motion in degrees }"
"{SNR |700 | signal to noise ratio信噪比 }"
;
// 运动模糊图像恢复算法 包括 PSF 生成、Wiener 滤波器生成和在频域中过滤模糊图像:
int main(int argc, char *argv[])
{
help();
CommandLineParser parser(argc, argv, keys);
if (parser.has("help"))
{
parser.printMessage();
return 0;
}
int LEN = parser.get<int>("LEN");
double THETA = parser.get<double>("THETA");
int snr = parser.get<int>("SNR");
string strInFileName = parser.get<String>("image");
if (!parser.check())
{
parser.printErrors();
return 0;
}
Mat imgIn;
imgIn = imread(strInFileName, IMREAD_GRAYSCALE);
if (imgIn.empty()) //检查图像是否加载
{
cout << "ERROR : Image cannot be loaded..!!" << endl;
return -1;
}
Mat imgOut;
//! [main]
// it needs to process even image only 图像的大小为 2*2,4*4 ,8*8 ………………都是可以进行去模糊的
Rect roi = Rect(0, 0, imgIn.cols & -2, imgIn.rows & -2);//
//Hw calculation (start)
Mat Hw, h;
calcPSF(h, roi.size(), LEN, THETA);
calcWnrFilter(h, Hw, 1.0 / double(snr));
//Hw calculation (stop)
imgIn.convertTo(imgIn, CV_32F);
edgetaper(imgIn, imgIn);//边缘逐渐变细
// filtering (start)
filter2DFreq(imgIn(roi), imgOut, Hw);//频域进行滤波
// filtering (stop)
//! [main]
imgOut.convertTo(imgOut, CV_8U);
normalize(imgOut, imgOut, 0, 255, NORM_MINMAX);
imwrite("result.jpg", imgOut);
return 0;
}
void help()
{
cout << "2018-08-14" << endl;
cout << "Motion_deblur_v2" << endl;
cout << "You will learn how to recover an image with motion blur distortion using a Wiener filter" << endl;
}
//! [calcPSF] 根据输入参数 LEN 和 THETA(以度为单位)形成一个 PSF 线性运动模糊失真的点扩散函数(PSF)是一条线段
void calcPSF(Mat& outputImg, Size filterSize, int len, double theta)
{
Mat h(filterSize, CV_32F, Scalar(0));
Point point(filterSize.width / 2, filterSize.height / 2);//中心点 椭圆圆心
ellipse(h, point, Size(0, cvRound(float(len) / 2.0)), 90.0 - theta, 0, 360, Scalar(255), FILLED);//椭圆
Scalar summa = sum(h);
outputImg = h / summa[0];//归一化
}
//! [calcPSF]
//! [fftshift] fft变换后进行频谱搬移 https://blog.csdn.net/zhaitianbao/article/details/117955380
void fftshift(const Mat& inputImg, Mat& outputImg)
{
outputImg = inputImg.clone();
int cx = outputImg.cols / 2;
int cy = outputImg.rows / 2;
Mat q0(outputImg, Rect(0, 0, cx, cy));
Mat q1(outputImg, Rect(cx, 0, cx, cy));
Mat q2(outputImg, Rect(0, cy, cx, cy));
Mat q3(outputImg, Rect(cx, cy, cx, cy));
Mat tmp;
q0.copyTo(tmp);
q3.copyTo(q0);
tmp.copyTo(q3);
q1.copyTo(tmp);
q2.copyTo(q1);
tmp.copyTo(q2);
}
//! [fftshift]
//! [filter2DFreq] 在频域中过滤模糊图像,再转换到时域
void filter2DFreq(const Mat& inputImg, Mat& outputImg, const Mat& H)
{
Mat planes[2] = { Mat_<float>(inputImg.clone()), Mat::zeros(inputImg.size(), CV_32F) };
Mat complexI;
merge(planes, 2, complexI);
dft(complexI, complexI, DFT_SCALE);
Mat planesH[2] = { Mat_<float>(H.clone()), Mat::zeros(H.size(), CV_32F) };
Mat complexH;
merge(planesH, 2, complexH);
Mat complexIH;
mulSpectrums(complexI, complexH, complexIH, 0);//频域相乘进行滤波
idft(complexIH, complexIH);//变换到时域
split(complexIH, planes);
outputImg = planes[0];//时域输出滤波后图像
}
//! [filter2DFreq]
//! [calcWnrFilter] 计算维纳滤波器
void calcWnrFilter(const Mat& input_h_PSF, Mat& output_G, double nsr)
{
Mat h_PSF_shifted;
fftshift(input_h_PSF, h_PSF_shifted);//点扩散函数 先进行搬移
Mat planes[2] = { Mat_<float>(h_PSF_shifted.clone()), Mat::zeros(h_PSF_shifted.size(), CV_32F) };
Mat complexI;
merge(planes, 2, complexI);
dft(complexI, complexI);//傅里叶变换
split(complexI, planes);
Mat denom;
pow(abs(planes[0]), 2, denom);//|H|^2
denom += nsr;//|H|^2+1/snr
divide(planes[0], denom, output_G);//H/(|H|^2+1/snr) ->output_G
}
//! [calcWnrFilter]
//! [edgetaper]使输入图像的边缘逐渐变细,以减少恢复图像中的振铃效应
//通过edgetaper在反卷积之前调用该函数,可以减少噪声放大和沿图像边界的振铃效应。 图像恢复对噪声功率参数的敏感性降低
void edgetaper(const Mat& inputImg, Mat& outputImg, double gamma, double beta)//对图像边缘进行模糊处理
{
int Nx = inputImg.cols;
int Ny = inputImg.rows;
Mat w1(1, Nx, CV_32F, Scalar(0));
Mat w2(Ny, 1, CV_32F, Scalar(0));
float* p1 = w1.ptr<float>(0);
float* p2 = w2.ptr<float>(0);
float dx = float(2.0 * CV_PI / Nx);
float x = float(-CV_PI);
for (int i = 0; i < Nx; i++)
{
p1[i] = float(0.5 * (tanh((x + gamma / 2) / beta) - tanh((x - gamma / 2) / beta)));
x += dx;
}
float dy = float(2.0 * CV_PI / Ny);
float y = float(-CV_PI);
for (int i = 0; i < Ny; i++)
{
p2[i] = float(0.5 * (tanh((y + gamma / 2) / beta) - tanh((y - gamma / 2) / beta)));
y += dy;
}
Mat w = w2 * w1;
multiply(inputImg, w, outputImg);
}
//! [edgetaper]
Explanation
运动模糊图像恢复算法包括 PSF 生成、Wiener 滤波器生成和在频域中过滤模糊图像:
// it needs to process even image only
Rect roi = Rect(0, 0, imgIn.cols & -2, imgIn.rows & -2);
//Hw calculation (start)
Mat Hw, h;
calcPSF(h, roi.size(), LEN, THETA);
calcWnrFilter(h, Hw, 1.0 / double(snr));
//Hw calculation (stop)
imgIn.convertTo(imgIn, CV_32F);
edgetaper(imgIn, imgIn);
// filtering (start)
filter2DFreq(imgIn(roi), imgOut, Hw);
// filtering (stop)函数 calcPSF() 根据输入参数 LEN 和 THETA(以度为单位)形成一个 PSF:
void calcPSF(Mat& outputImg, Size filterSize, int len, double theta)
{
Mat h(filterSize, CV_32F, Scalar(0));
Point point(filterSize.width / 2, filterSize.height / 2);
ellipse(h, point, Size(0, cvRound(float(len) / 2.0)), 90.0 - theta, 0, 360, Scalar(255), FILLED);
Scalar summa = sum(h);
outputImg = h / summa[0];
}函数 edgetaper() 使输入图像的边缘逐渐变细,以减少恢复图像中的振铃效应:振铃效应(ringing artifacts) - ostartech - 博客园 (cnblogs.com)
void edgetaper(const Mat& inputImg, Mat& outputImg, double gamma, double beta)
{
int Nx = inputImg.cols;
int Ny = inputImg.rows;
Mat w1(1, Nx, CV_32F, Scalar(0));
Mat w2(Ny, 1, CV_32F, Scalar(0));
float* p1 = w1.ptr<float>(0);
float* p2 = w2.ptr<float>(0);
float dx = float(2.0 * CV_PI / Nx);
float x = float(-CV_PI);
for (int i = 0; i < Nx; i++)
{
p1[i] = float(0.5 * (tanh((x + gamma / 2) / beta) - tanh((x - gamma / 2) / beta)));
x += dx;
}
float dy = float(2.0 * CV_PI / Ny);
float y = float(-CV_PI);
for (int i = 0; i < Ny; i++)
{
p2[i] = float(0.5 * (tanh((y + gamma / 2) / beta) - tanh((y - gamma / 2) / beta)));
y += dy;
}
Mat w = w2 * w1;
multiply(inputImg, w, outputImg);
}函数 calcWnrFilter()、fftshift() 和 filter2DFreq() 实现了在频域中通过指定的 PSF 对图像进行过滤。 这些函数是从教程 Out-of-focus Deblur Filter 中复制而来的。
Result
下面您可以看到具有运动模糊失真的真实世界图像。 两辆车的车牌都是不可读的。 红色标记显示汽车的车牌位置。
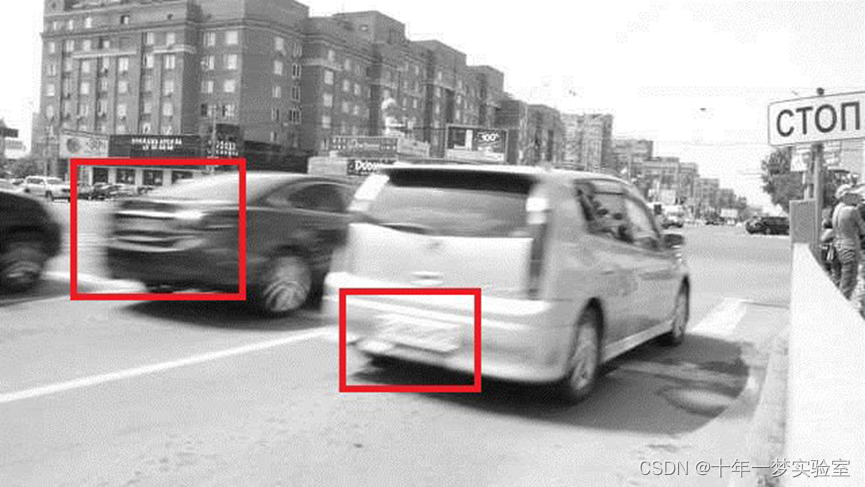
Motion blur image. The license plates are not readable
运动模糊图像。 车牌不可读
下面你可以看到黑色车牌的恢复结果。 结果是使用 LEN = 125、THETA = 0、SNR = 700 计算得出的。
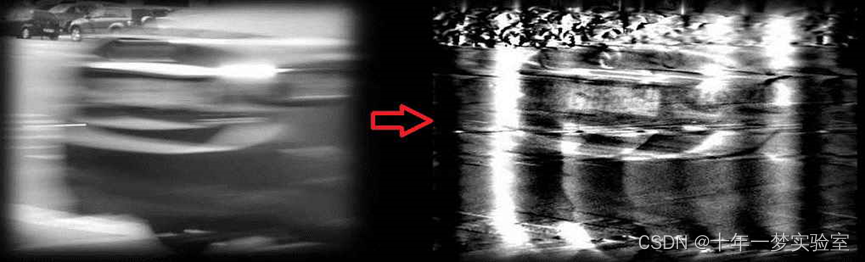
The restored image of the black car license plate
黑色车牌的还原图
下面你可以看到白色车牌的恢复结果。 结果是使用 LEN = 78、THETA = 15、SNR = 300 计算得出的。
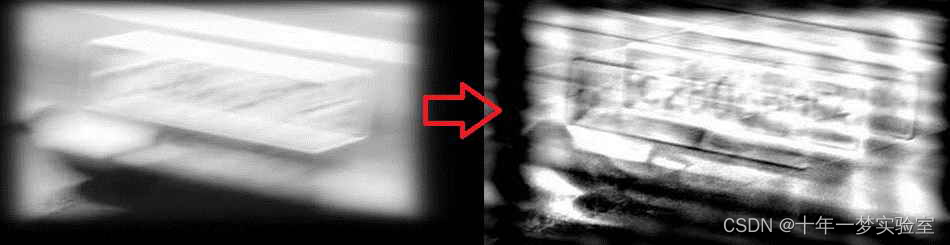
SNR、LEN 和 THETA 的值是手动选择的,以提供最佳的视觉效果。 THETA 参数与小车的运动方向一致,LEN 参数取决于小车的运动速度。 结果并不完美,但至少它给了我们图像内容的暗示。 经过一番努力,现在可以读取汽车牌照。
笔记
参数 LEN 和 THETA 是最重要的。 您应该先调整 LEN 和 THETA,然后再调整 SNR。
您还可以在 YouTube https://youtu.be/xSrE0hdhb4o 上找到车牌恢复方法的快速视频演示。














 1640
1640











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









