






目标:创建内容过滤订阅。
教程级别:高级
时间:15 分钟
目录
概述
RMW 支持
安装演示
温度过滤演示
相关内容
概述
ROS 2 应用程序通常由主题组成,以便将数据从发布者传输到订阅者。基本上,订阅者会接收主题上发布者发布的所有数据。但有时,订阅者可能只对发布者发送的数据的一个子集感兴趣。内容过滤订阅允许仅接收应用程序感兴趣的数据。
在此演示中,我们将重点介绍如何创建内容过滤订阅及其工作原理。
RMW 支持
内容过滤订阅需要 RMW 实施支持。
rmw_fastrtps | 支持 |
rmw_connextdds | 支持 |
rmw_cyclonedds | 不支持 |
目前所有支持内容过滤订阅的 RMW 实现都是基于 DDS 的。这意味着支持的过滤表达式和参数也依赖于 DDS https://www.omg.org/omg-dds-portal/ ,详情请参阅 DDS https://www.omg.org/spec/DDS/1.4/PDF 规范 Annex B - Syntax for Queries and Filters 。
安装演示
请参阅安装说明以了解安装 ROS 2 的详细信息。
如果您已经从软件包安装了 ROS 2,请确保已安装 ros-jazzy-demo-nodes-cpp 。如果您下载了存档或从源代码构建了 ROS 2,它将已经是安装的一部分。
温度过滤演示
此演示展示了如何使用内容过滤订阅仅接收超出可接受温度范围的温度值,从而检测紧急情况。内容过滤订阅会过滤掉不感兴趣的温度数据,因此不会发出订阅回调。
内容过滤发布者:
https://github.com/ros2/demos/blob/jazzy/demo_nodes_cpp/src/topics/content_filtering_publisher.cpp
#include <array> // 引入数组头文件
#include <chrono> // 引入时间库头文件
#include <memory> // 引入智能指针头文件
#include <utility> // 引入实用工具头文件
#include "rclcpp/rclcpp.hpp" // 引入ROS2的核心库
#include "rclcpp_components/register_node_macro.hpp" // 引入ROS2节点注册宏
#include "std_msgs/msg/float32.hpp" // 引入标准消息类型Float32
#include "demo_nodes_cpp/visibility_control.h" // 引入可见性控制头文件
namespace demo_nodes_cpp
{
// 模拟的温度数据从-100.0开始,到150.0结束,步长为10.0
constexpr std::array<float, 3> TEMPERATURE_SETTING {-100.0f, 150.0f, 10.0f};
// 创建一个ContentFilteringPublisher类,继承自rclcpp::Node基类。
// 下面的主函数将实例化这个类作为一个ROS节点。
class ContentFilteringPublisher final : public rclcpp::Node
{
public:
DEMO_NODES_CPP_PUBLIC
explicit ContentFilteringPublisher(const rclcpp::NodeOptions & options)
: Node("content_filtering_publisher", options)
{
// 创建一个用于发送消息的函数。
auto publish_message =
[this]() -> void
{
msg_ = std::make_unique<std_msgs::msg::Float32>(); // 创建一个Float32类型的消息
msg_->data = temperature_; // 设置消息数据为当前温度
temperature_ += TEMPERATURE_SETTING[2]; // 温度增加步长
if (temperature_ > TEMPERATURE_SETTING[1]) { // 如果温度超过最大值
temperature_ = TEMPERATURE_SETTING[0]; // 重置为最小值
}
RCLCPP_INFO(this->get_logger(), "Publishing: '%f'", msg_->data); // 记录发布的消息
// 将消息放入队列以供中间件处理。
// 这个调用是非阻塞的。
pub_->publish(std::move(msg_)); // 发布消息
};
// 创建一个具有自定义质量服务配置文件的发布者。
// 建议使用统一初始化,以便用户可以轻松更改为rclcpp::KeepAll{}。
// (rclcpp::KeepLast(7) -> rclcpp::KeepAll() 编译失败)
rclcpp::QoS qos(rclcpp::KeepLast{7});
pub_ = this->create_publisher<std_msgs::msg::Float32>("temperature", qos); // 创建发布者
int64_t publish_ms = this->declare_parameter("publish_ms", 1000); // 声明发布间隔参数,默认值为1000毫秒
// 使用定时器定期调度消息发布。
timer_ = this->create_wall_timer(std::chrono::milliseconds(publish_ms), publish_message); // 创建定时器
}
private:
float temperature_ = TEMPERATURE_SETTING[0]; // 初始化温度为最小值
std::unique_ptr<std_msgs::msg::Float32> msg_; // 定义一个Float32类型的智能指针消息
rclcpp::Publisher<std_msgs::msg::Float32>::SharedPtr pub_; // 定义一个Float32类型的发布者
rclcpp::TimerBase::SharedPtr timer_; // 定义一个定时器
};
} // namespace demo_nodes_cpp
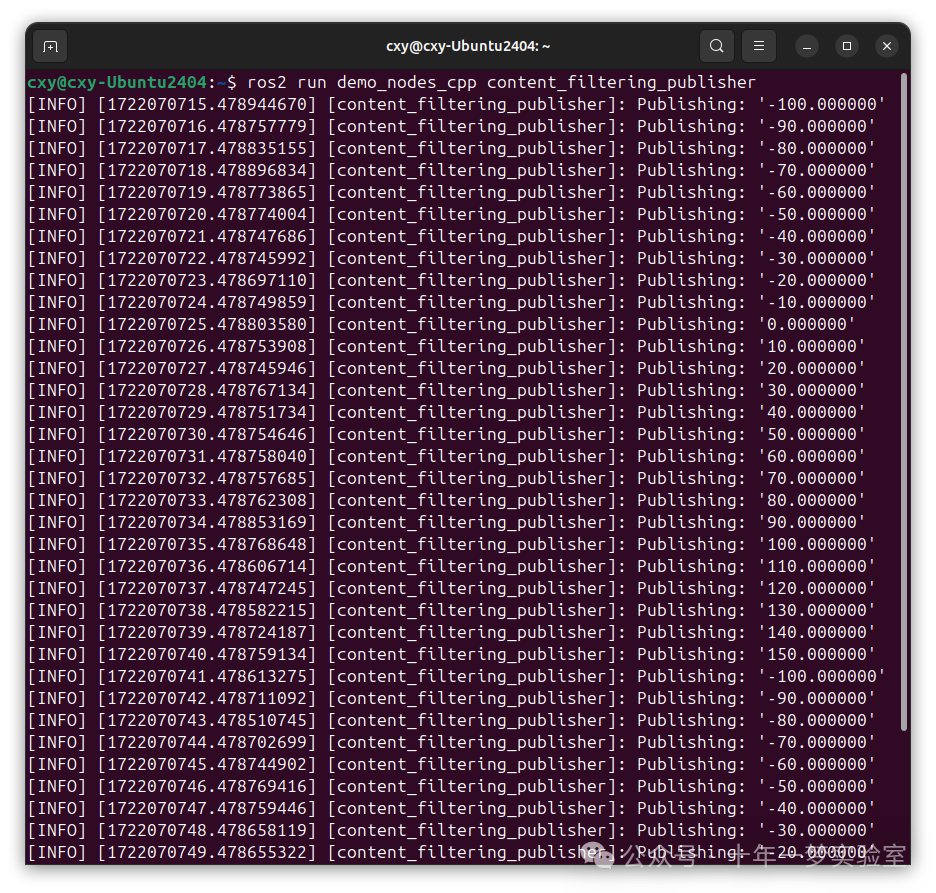
RCLCPP_COMPONENTS_REGISTER_NODE(demo_nodes_cpp::ContentFilteringPublisher) // 注册节点内容过滤器是在订阅方定义的,发布者不需要以任何特殊方式进行配置以允许内容过滤。 ContentFilteringPublisher 节点发布的模拟温度数据从-100.0 开始,到 150.0 结束,每秒步长为 10.0。
我们可以通过运行 ros2 run demo_nodes_cpp content_filtering_publisher 可执行文件来运行演示(不要忘记先获取设置文件的源):
内容过滤订阅者:
https://github.com/ros2/demos/blob/jazzy/demo_nodes_cpp/src/topics/content_filtering_subscriber.cpp
#include <array> // 引入数组库
#include <string> // 引入字符串库
#include "rclcpp/rclcpp.hpp" // 引入ROS 2的C++客户端库
#include "rclcpp_components/register_node_macro.hpp" // 引入ROS 2节点注册宏
#include "rcpputils/join.hpp" // 引入rcpputils库中的join函数
#include "std_msgs/msg/float32.hpp" // 引入标准消息类型Float32
#include "demo_nodes_cpp/visibility_control.h" // 引入可见性控制头文件
namespace demo_nodes_cpp // 定义命名空间demo_nodes_cpp
{
// 紧急温度数据小于-30或大于100
constexpr std::array<float, 2> EMERGENCY_TEMPERATURE {-30.0f, 100.0f};
// 创建一个ContentFilteringSubscriber类,继承自通用的rclcpp::Node基类。
// 下面的主函数将实例化该类作为一个ROS节点。
class ContentFilteringSubscriber : public rclcpp::Node
{
public:
DEMO_NODES_CPP_PUBLIC
explicit ContentFilteringSubscriber(const rclcpp::NodeOptions & options)
: Node("content_filtering_subscriber", options) // 初始化节点名称为content_filtering_subscriber
{
// 创建一个回调函数用于接收消息。
auto callback =
this -> void
{
if (msg.data < EMERGENCY_TEMPERATURE[0] || msg.data > EMERGENCY_TEMPERATURE[1]) {
RCLCPP_INFO(
this->get_logger(),
"I receive an emergency temperature data: [%f]", msg.data); // 接收到紧急温度数据
} else {
RCLCPP_INFO(this->get_logger(), "I receive a temperature data: [%f]", msg.data); // 接收到普通温度数据
}
};
// 初始化一个带有内容过滤器的订阅,以接收小于-30或大于100的紧急温度数据。
rclcpp::SubscriptionOptions sub_options;
sub_options.content_filter_options.filter_expression = "data < %0 OR data > %1"; // 设置过滤表达式
sub_options.content_filter_options.expression_parameters = {
std::to_string(EMERGENCY_TEMPERATURE[0]), // 设置表达式参数
std::to_string(EMERGENCY_TEMPERATURE[1])
};
sub_ = create_subscription<std_msgs::msg::Float32>("temperature", 10, callback, sub_options); // 创建订阅
if (!sub_->is_cft_enabled()) {
RCLCPP_WARN(
this->get_logger(), "Content filter is not enabled since it's not supported"); // 内容过滤器不支持
} else {
RCLCPP_INFO(
this->get_logger(),
"subscribed to topic \"%s\" with content filter options \"%s, {%s}\"",
sub_->get_topic_name(),
sub_options.content_filter_options.filter_expression.c_str(),
rcpputils::join(sub_options.content_filter_options.expression_parameters, ", ").c_str()); // 订阅成功
}
}
private:
rclcpp::Subscription<std_msgs::msg::Float32>::SharedPtr sub_; // 定义一个Float32消息的订阅者
};
} // namespace demo_nodes_cpp
RCLCPP_COMPONENTS_REGISTER_NODE(demo_nodes_cpp::ContentFilteringSubscriber) // 注册节点要启用内容过滤,应用程序可以在 SubscriptionOptions 中设置过滤表达式和表达式参数。应用程序还可以检查订阅是否启用了内容过滤。
在此演示中, ContentFilteringSubscriber 节点创建了一个内容过滤订阅,只有当温度值小于 -30.0 或大于 100.0 时才会接收消息。
如前所述,内容过滤订阅支持取决于 RMW 实现。应用程序可以使用 is_cft_enabled 方法检查订阅上是否实际启用了内容过滤。
要测试内容过滤订阅,让我们运行它:
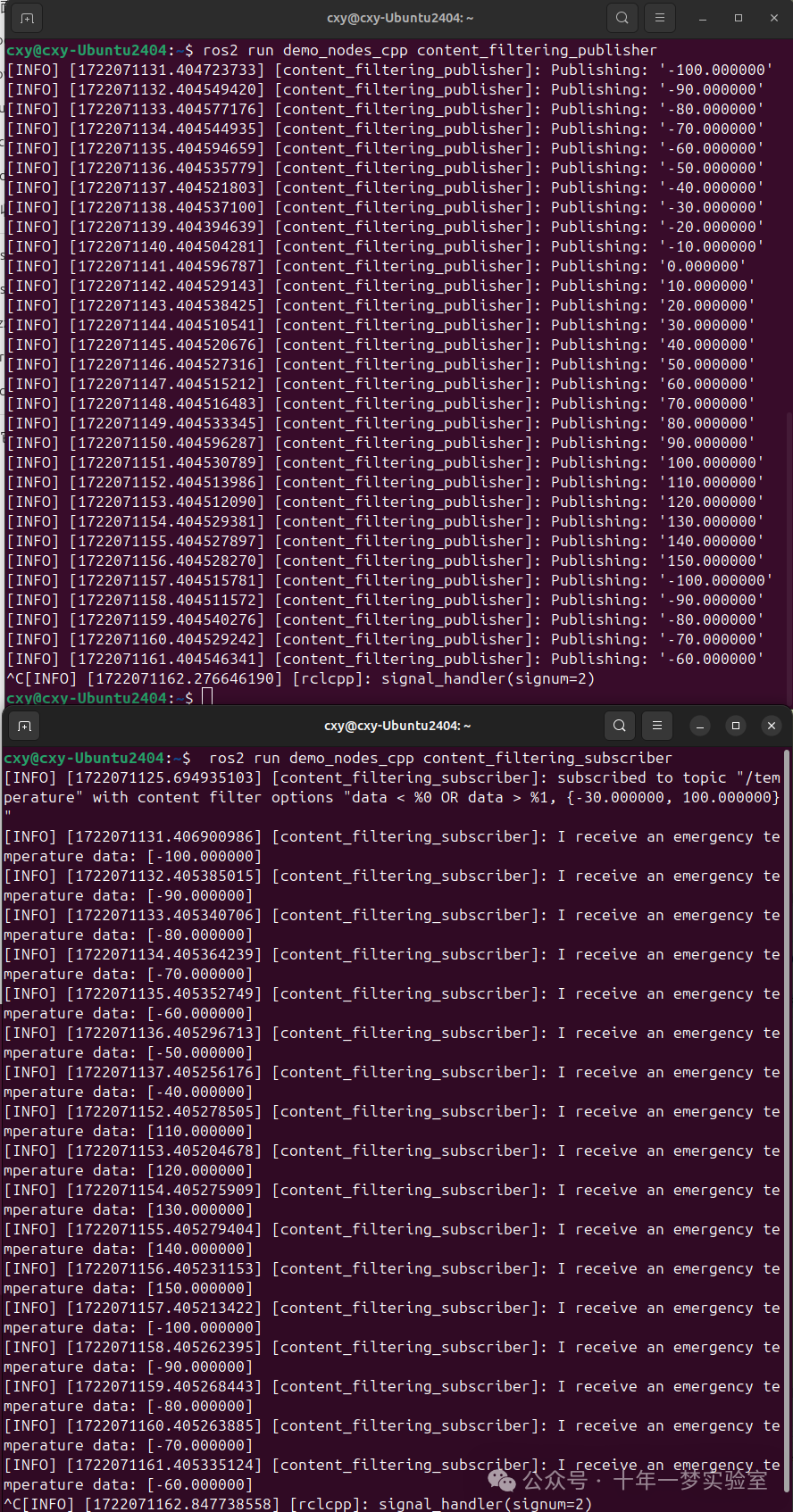
您应该看到一条消息,显示所使用的内容过滤选项和每条收到的消息的日志,只有当温度值小于-30.0 或大于 100.0 时才会显示。
如果 RMW 实现不支持内容过滤,订阅仍将创建,但不启用内容过滤。我们可以通过执行 RMW_IMPLEMENTATION=rmw_cyclonedds_cpp ros2 run demo_nodes_cpp content_filtering_publisher 来尝试。
$ RMW_IMPLEMENTATION=rmw_cyclonedds_cpp ros2 run demo_nodes_cpp content_filtering_subscriber
[WARN] [1651096637.893842072] [content_filtering_subscriber]: Content filter is not enabled since it is not supported
[INFO] [1651096641.246043703] [content_filtering_subscriber]: I receive an emergency temperature data: [-100.000000]
[INFO] [1651096642.245833527] [content_filtering_subscriber]: I receive an emergency temperature data: [-90.000000]
[INFO] [1651096643.245743471] [content_filtering_subscriber]: I receive an emergency temperature data: [-80.000000]
[INFO] [1651096644.245833932] [content_filtering_subscriber]: I receive an emergency temperature data: [-70.000000]
[INFO] [1651096645.245916679] [content_filtering_subscriber]: I receive an emergency temperature data: [-60.000000]
[INFO] [1651096646.245861895] [content_filtering_subscriber]: I receive an emergency temperature data: [-50.000000]
[INFO] [1651096647.245946352] [content_filtering_subscriber]: I receive an emergency temperature data: [-40.000000]
[INFO] [1651096648.245934569] [content_filtering_subscriber]: I receive a temperature data: [-30.000000]
[INFO] [1651096649.245877906] [content_filtering_subscriber]: I receive a temperature data: [-20.000000]
[INFO] [1651096650.245939068] [content_filtering_subscriber]: I receive a temperature data: [-10.000000]
[INFO] [1651096651.245911450] [content_filtering_subscriber]: I receive a temperature data: [0.000000]
[INFO] [1651096652.245879830] [content_filtering_subscriber]: I receive a temperature data: [10.000000]
[INFO] [1651096653.245858329] [content_filtering_subscriber]: I receive a temperature data: [20.000000]
[INFO] [1651096654.245916370] [content_filtering_subscriber]: I receive a temperature data: [30.000000]
[INFO] [1651096655.245933741] [content_filtering_subscriber]: I receive a temperature data: [40.000000]
[INFO] [1651096656.245833975] [content_filtering_subscriber]: I receive a temperature data: [50.000000]
[INFO] [1651096657.245971483] [content_filtering_subscriber]: I receive a temperature data: [60.000000]您可以看到消息 Content filter is not enabled ,因为底层 RMW 实现不支持该功能,但演示仍然成功创建了正常订阅以接收所有温度数据。
相关内容
内容过滤示例 https://github.com/ros2/examples/blob/jazzy/rclcpp/topics/minimal_subscriber/content_filtering.cpp ,涵盖内容过滤订阅的所有接口。
内容过滤设计PR https://github.com/ros2/design/pull/282















 2780
2780

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









