







随着科技的快速发展,履带式侦查无人车作为一种新型的侦察装备,在军事、安防、灾难救援等领域发挥着越来越重要的作用。本文将对履带式侦查无人车的关键技术进行详细介绍,包括驱动技术、无人操控系统、感知与导航、路径规划、承重与越障、遥控与通信、安全性能以及应用领域等方面。
驱动技术
履带式侦查无人车采用履带式驱动方式,具有出色的地形适应性和稳定性。其驱动系统通常由电机、减速器、驱动轮等组成,能够实现快速、灵活的移动。此外,履带式驱动还能够有效降低对地面的压强,减少对地面的破坏,提高无人车在各种地形上的通过能力。
无人操控系统
无人操控系统是履带式侦查无人车的核心,负责接收并执行远程操作指令。该系统通常包括车载控制单元、遥控终端和通信链路。车载控制单元根据接收到的指令,控制无人车的运动、姿态和传感器等;遥控终端则提供人机交互界面,使操作人员能够直观地监控无人车的状态并发送指令;通信链路则保证遥控指令的实时传输和可靠接收。
感知与导航
感知与导航技术是履带式侦查无人车实现自主运动的关键。感知系统通过各类传感器(如激光雷达、红外传感器、摄像头等)实时获取周围环境信息,为导航系统提供准确的数据支持。导航系统则根据感知系统提供的信息,计算出无人车的当前位置、速度和姿态,并规划出最优的运动路径。
路径规划
路径规划是履带式侦查无人车实现高效侦察的关键技术之一。通过综合考虑地形、障碍物、目标位置等因素,路径规划系统能够计算出一条最优的运动路径,使无人车能够快速、准确地到达目标位置。此外,路径规划系统还需要具备实时调整能力,以应对复杂多变的实际环境。
承重与越障
履带式侦查无人车需要具备足够的承重能力和越障能力,以适应各种复杂环境。其结构设计和材料选择都需要考虑到这些因素。例如,车身骨架可以采用轻质高强度的材料制成,以减轻整车重量并提高承重能力;履带系统则需要具有足够的牵引力和通过能力,以应对各种障碍物和地形。
遥控与通信
遥控与通信是履带式侦查无人车实现远程操控的关键。遥控系统需要具备良好的操作性和可靠性,以保证操作人员能够准确地控制无人车的运动;通信系统则需要具备高速、稳定、抗干扰等特点,以保证遥控指令的实时传输和可靠接收。

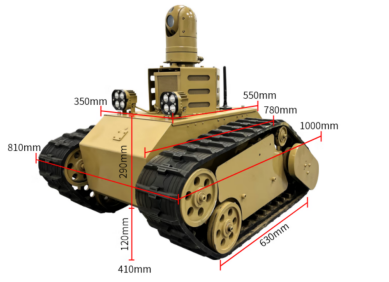
参数推荐:
-
机身尺寸 1020mm×750mm×405mm
-
电机类型 电动伺服电机
-
驱动形式 履带式
-
减速机类型 行星减速
-
空机重量 95kg
-
额定载重(kg) 100kg
-
最大加速 5m/s
-
最大减速 5m/s
-
最大地面行驶速度 10m/s
-
最大爬坡度 ≥30°
-
越壕宽度 400mm
-
最大侧坡 20°
-
空载运行时间 130分钟
-
最大控制距离 2km(开阔无遮挡,无电磁干扰)
-
续航里程(km) ≥10 km
安全性能
安全性能是履带式侦查无人车设计中不可忽视的因素。为了保证无人车在运行过程中的安全性,需要采取一系列措施,如设置紧急停车按钮、加装防护装置等。此外,还需要对无人车的控制系统和传感器等进行严格的质量控制和安全测试,以确保其在实际应用中的稳定性和可靠性。
应用领域
履带式侦查无人车具有广泛的应用前景。在军事领域,它可以用于执行侦察、监视、目标打击等任务;在安防领域,它可以用于巡逻、警戒、反恐等任务;在灾难救援领域,它可以用于搜索救援、物资运输等任务。随着技术的不断发展和应用领域的不断拓宽,履带式侦查无人车将在更多领域展现出其独特的优势和价值。


















 565
565

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











