










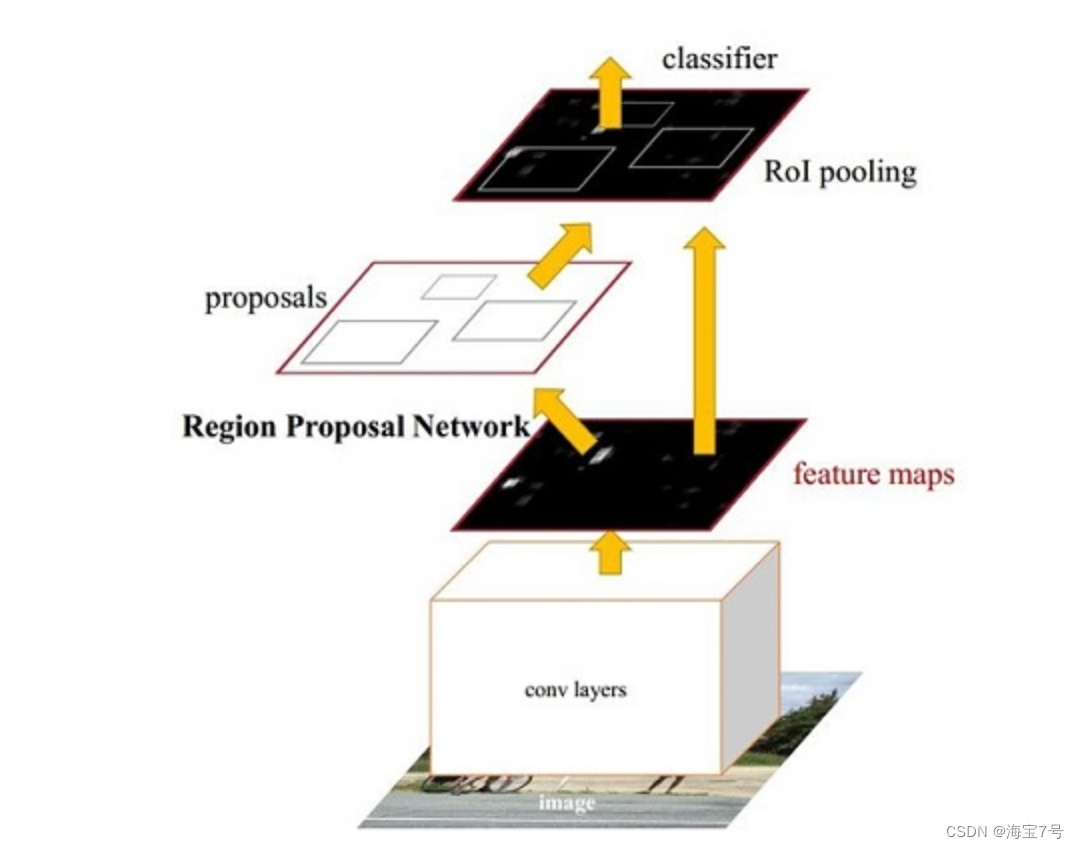
Ross B. Girshick在2016年提出了新的Faster RCNN,在结构上,Faster RCNN已经将特征抽取(feature extraction),proposal提取,bounding box regression(rect refine),classification都整合在了一个网络中,使得综合性能有较大提高,在检测速度方面尤为明显。
Faster R-CNN
Faster R-CNN是截止目前,RCNN系列算法的最杰出产物,two-stage中最为经典的物体检测算法。
主要是两大阶段的处理:
第一阶段先找出图片中待检测物体的anchor矩形框(对背景、待检测物体进行二分类)。
第二阶段对anchor框内待检测物体进行分类。
同时主要包括两个模块:一个是深度全卷积网络RPN,该网络用来产生候选区域;另一个是Fast R-CNN检测器,使用RPN网络产生的候选区域进行分类与边框回归计算。
参考来源:
https://zhuanlan.zhihu.com/p/31426458
https://zhuanlan.zhihu.com/p/82185598
https://blog.csdn.net/fengbingchun/article/details/87195597
https://blog.csdn.net/weixin_43198141/article/details/90178512
论文原文:https://arxiv.org/abs/1506.01497
实例://别人的。
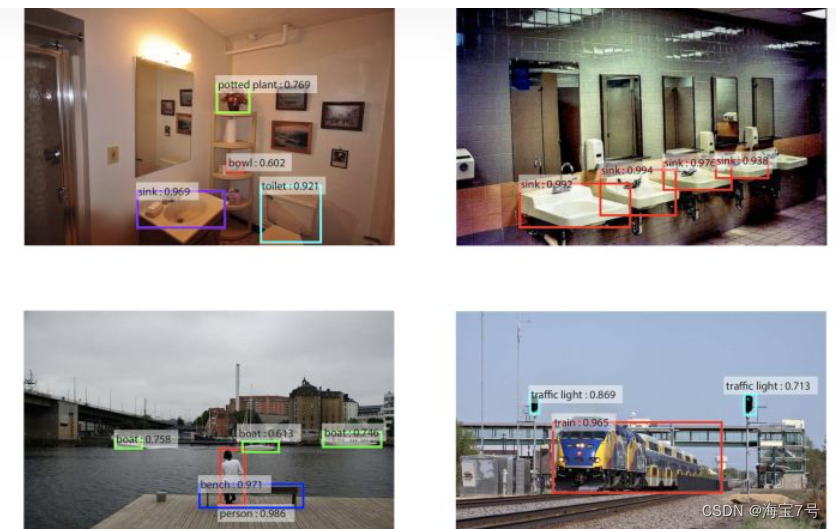
内容暂且不管,深度学习检测应用,先看结果。
*
以终为始

引文说明:
%% Forward Collision Warning Using Sensor Fusion
% This example shows how to perform forward collision warning by fusing
% data from vision and radar sensors to track objects in front of the
% vehicle.
%
%% Overview
% Forward collision warning (FCW) is an important feature in driver
% assistance and automated driving systems, where the goal is to provide
% correct, timely, and reliable warnings to the driver before an impending
% collision with the vehicle in front. To achieve the goal, vehicles are
% equipped with forward-facing vision and radar sensors. Sensor fusion is
% required to increase the probability of accurate warnings and minimize
% the probability of false warnings.
%
% For the purposes of this example, a test car (the ego vehicle) was
% equipped with various sensors and their outputs were recorded. The
% sensors used for this example were:
%
% # Vision sensor, which provided lists of observed objects with their
% classification and information about lane boundaries. The object lists
% were reported 10 times per second. Lane boundaries were reported 20
% times per second.
% # Radar sensor with medium and long range modes, which provided lists of
% unclassified observed objects. The object lists were reported 20 times
% per second.
% # IMU, which reported the speed and turn rate of the ego vehicle 20 times
% per second.
% # Video camera, which recorded a video clip of the scene in front of the
% car. Note: This video is not used by the tracker and only serves to
% display the tracking results on video for verification.
%
% The process of providing a forward collision warning comprises the
% following steps:
%
% # Obtain the data from the sensors.
% # Fuse the sensor data to get a list of tracks, i.e., estimated
% positions and velocities of the objects in front of the car.
% # Issue warnings based on the tracks and FCW criteria. The FCW criteria
% are based on the Euro NCAP AEB test procedure and take into account the
% relative distance and relative speed to the object in front of the car.
%
% For more information about tracking multiple objects, see
% <matlab:helpview(fullfile(docroot,'toolbox','vision','vision.map'),'multipleObjectTracking') Multiple Object Tracking>.
%
% The visualization in this example is done using
% <matlab:doc('monoCamera'), monoCamera> and <matlab:doc('birdsEyePlot')
% birdsEyePlot>. For brevity, the functions that create and update the
% display were moved to helper functions outside of this example. For more
% information on how to use these displays, see
% <UsingMonoCameraToDisplayObjectOnVideoExample.html Annotate Video Using
% Detections in Vehicle Coordinates> and <BirdsEyePlotExample.html
% Visualize Sensor Coverage, Detections, and Tracks>.
%
% This example is a script, with the main body shown here and helper
% routines in the form of
% <matlab:helpview(fullfile(docroot,'toolbox','matlab','matlab_prog','matlab_prog.map'),'matlab_prog_localfunctions_livescripts') local functions>
% in the sections that follow.
使用传感器融合的前向碰撞警告
此示例显示如何通过融合执行前向碰撞警告
来自视觉和雷达传感器的数据,用于跟踪车辆。
概述
前向碰撞警告(FCW)是驾驶员的一项重要功能
协助和自动驾驶系统,其目标是提供在即将发生的
与前面车辆发生碰撞。为了实现这一目标,车辆配备前向视觉和雷达传感器。传感器融合是需要增加准确警告的概率,并将错误警告的概率。
在本示例中,测试车(ego车辆)为配备各种传感器并记录其输出。
本示例中使用的传感器包括:
#视觉传感器,提供观察对象列表及其车道边界的分类和信息。对象列表每秒报告10次。车道边界报告20每秒次。
#中远程模式雷达传感器,提供未分类观察对象。对象列表报告了20次每秒。
#IMU,它报告了ego车辆20次的速度和转向率
每秒。
#摄像机,它在汽车。注意:此视频不供跟踪器使用,仅用于在视频上显示跟踪结果以供验证。
提供前向碰撞警告的过程包括以下步骤:
#从传感器获取数据。
#融合传感器数据以获得轨迹列表,即估计轨迹车辆前方物体的位置和速度。
#根据曲目和FCW标准发出警告。FCW标准
基于欧洲NCAP AEB测试程序,并考虑与车辆前方物体的相对距离和相对速度
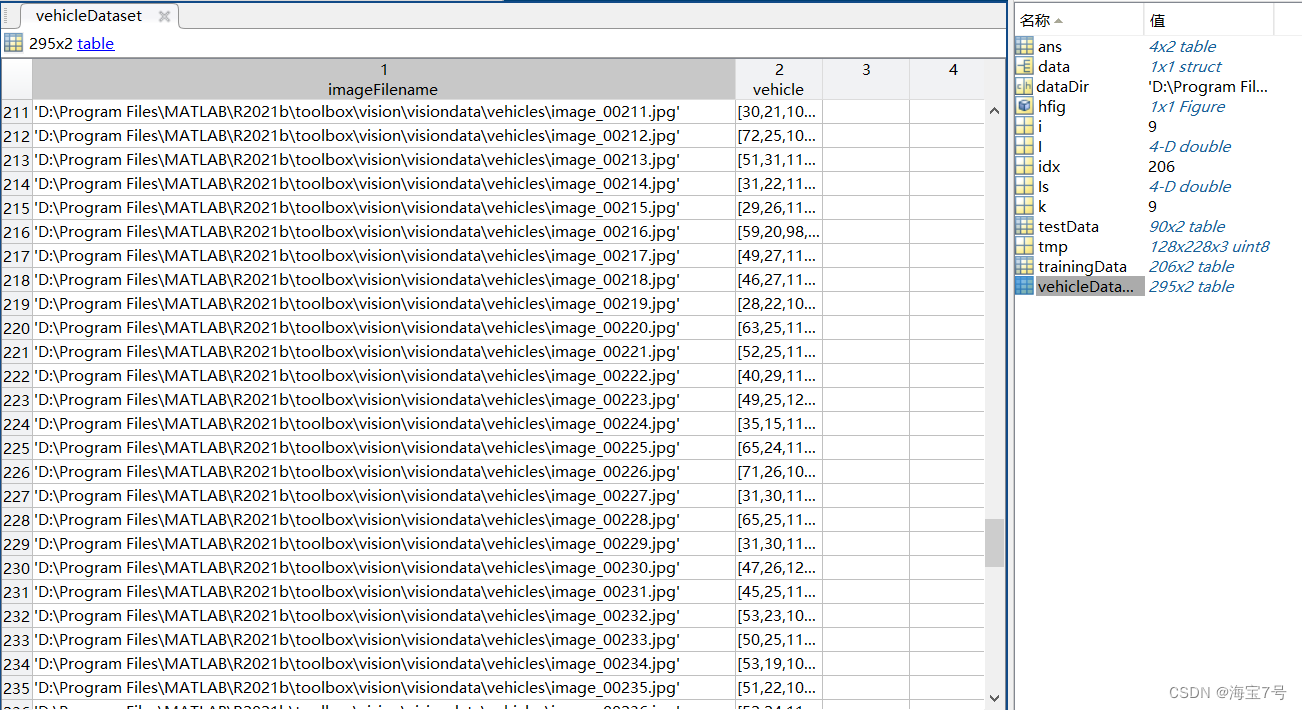
输出矩阵:
4×2 table
imageFilename vehicle
____________________________ ________________
{'vehicles/image_00001.jpg'} {[126 78 20 16]}
{'vehicles/image_00002.jpg'} {[100 72 35 26]}
{'vehicles/image_00003.jpg'} {[ 62 69 26 19]}
{'vehicles/image_00004.jpg'} {[ 71 64 22 21]}
汽车影像文件:
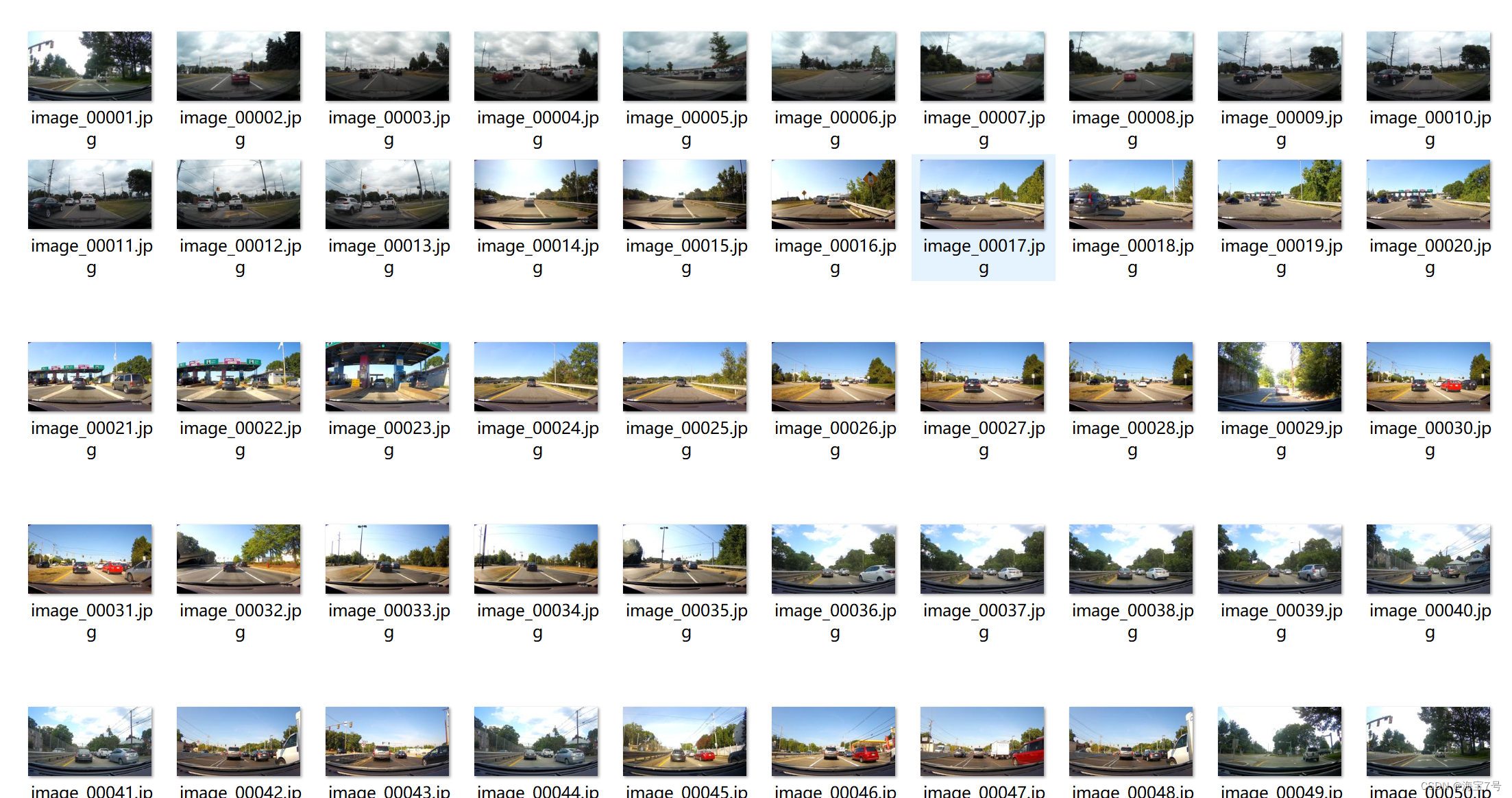
数据集:
加载数据
% vehicleDataset是一个dataset数据类型,第一列是图片的相对路径,第二列是图片中小汽车的位置
data = load('fasterRCNNVehicleTrainingData.mat');
vehicleDataset = data.vehicleTrainingData;
% 显示数据结构
vehicleDataset(1:4,:)
% 设置数据集目录
dataDir = fullfile(toolboxdir('vision'),'visiondata');
vehicleDataset.imageFilename = fullfile(dataDir, vehicleDataset.imageFilename);
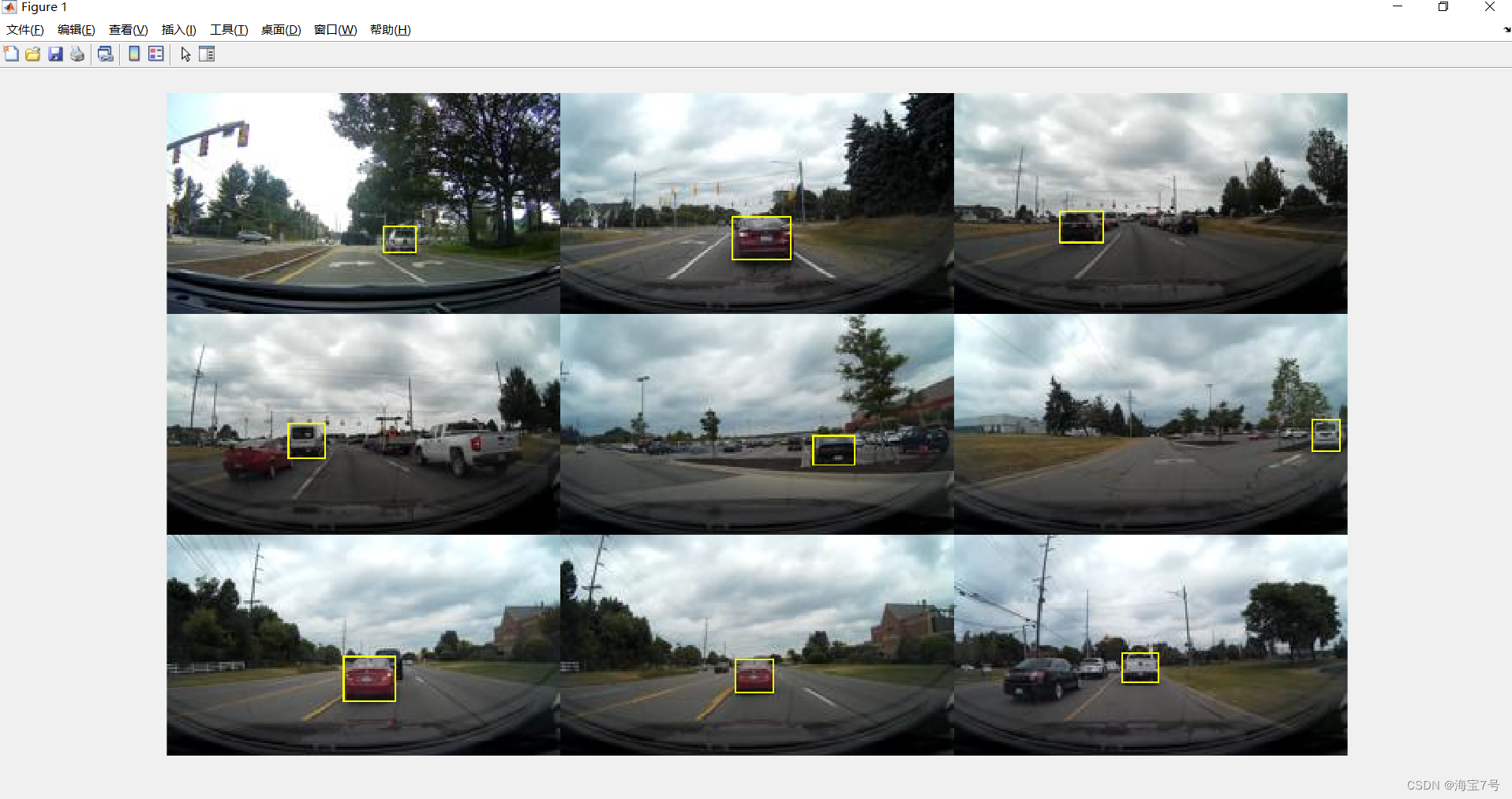
% 展示前9幅图片
k = 9;
I=zeros(128,228,3,k);
for i = 1 : k
% 读取图片
tmp = imread(vehicleDataset.imageFilename{i});
% 添加标识框
tmp = insertShape(tmp, 'Rectangle', vehicleDataset.vehicle{i});
I(:,:,:,i) = mat2gray(tmp);
end
% 显示
Is = I;
hfig = figure; montage(Is);
set(hfig, 'Units', 'Normalized', 'Position', [0, 0, 1, 1]);
pause(1);
% 将数据划分两部分
% 前70%的数据用于训练,后面30%用于测试
idx = floor(0.7 * height(vehicleDataset));
trainingData = vehicleDataset(1:idx,:);
testData = vehicleDataset(idx:end,:);
设计CNN网络结构
% 输入层,最小检测对象约32*32
inputLayer = imageInputLayer([32 32 3]);
% 中间层
% 定义卷基层参数
filterSize = [3 3];
numFilters = 32;
middleLayers = [
% 卷积+激活
convolution2dLayer(filterSize, numFilters, 'Padding', 1)
reluLayer()
% 卷积+激活+池化
convolution2dLayer(filterSize, numFilters, 'Padding', 1)
reluLayer()
maxPooling2dLayer(3, 'Stride',2)
];
% 输出层
finalLayers = [
% 新增一个包含64个输出的全连接层
fullyConnectedLayer(64)
% 新增一个非线性ReLU层
reluLayer
% 新增全连接层,用于判断图片是否包含检测对象
fullyConnectedLayer(width(vehicleDataset))
% 添加softmax和classification层
softmaxLayer
classificationLayer
];
% 组合所有层
layers = [
inputLayer
middleLayers
finalLayers
]
配置相关的训练参数
options = [
% 第1步,Training a Region Proposal Network (RPN)
trainingOptions('sgdm', 'MaxEpochs', 10,'InitialLearnRate', 1e-5,'CheckpointPath', tempdir)
% 第2步,Training a Fast R-CNN Network using the RPN from step 1
trainingOptions('sgdm', 'MaxEpochs', 10,'InitialLearnRate', 1e-5,'CheckpointPath', tempdir)
% 第3步,Re-training RPN using weight sharing with Fast R-CNN
trainingOptions('sgdm', 'MaxEpochs', 10,'InitialLearnRate', 1e-6,'CheckpointPath', tempdir)
% 第4步,Re-training Fast R-CNN using updated RPN
trainingOptions('sgdm', 'MaxEpochs', 10,'InitialLearnRate', 1e-6,'CheckpointPath', tempdir)
];
训练网络,进行本地处理
doTrainingAndEval = true;
if doTrainingAndEval
% 设置锚点,并执行训练
rng(0);
detector = trainFasterRCNNObjectDetector(trainingData, layers, options, ...
'NegativeOverlapRange', [0 0.3], ...
'PositiveOverlapRange', [0.6 1], ...
'BoxPyramidScale', 1.2);
else
% 直接载入
detector = data.detector;
end
测试结果:
I = imread('highway.png');
% 运行检测器,输出目标位置和得分
[bboxes, scores] = detect(detector, I);
% 在图像上标记处识别的小汽车
I = insertObjectAnnotation(I, 'rectangle', bboxes, scores);
figure
imshow(I)
结果评估分析:
I = imread('highway.png');
% 运行检测器,输出目标位置和得分
[bboxes, scores] = detect(detector, I);
% 在图像上标记处识别的小汽车
I = insertObjectAnnotation(I, 'rectangle', bboxes, scores);
figure
imshow(I)
%% 评估训练效果
if doTrainingAndEval
resultsStruct = struct([]);
for i = 1:height(testData)
% 读取测试图片
I = imread(testData.imageFilename{i});
% 运行RCNN检测器
[bboxes, scores, labels] = detect(detector, I);
% 结果保存到结构体
resultsStruct(i).Boxes = bboxes;
resultsStruct(i).Scores = scores;
resultsStruct(i).Labels = labels;
end
% 将结构体转换为table数据类型
results = struct2table(resultsStruct);
else
% 直接加载之前评估好的数据
results = data.results;
end
% 从测试数据中提取期望的小车位置
expectedResults = testData(:, 2:end);
本文的训练数据206,测试90,适合小批量样本的研究和应用。亲测实用,不过还有很多需要改进的地方。比如调参,还有环境的升级配置,换用其他类型的CNN网络进一步测试。
识别的初步结果:
尬住。
在实际场景的应用–处理一段视频可能存在小bug。
第二个程序文件夹来不及测试了
本文配套源文件
基于Faster R-CNN的深度学习检测汽车目标
主要侧重于数据集的分析和训练测试分析—亲测实用
下载–>传送门
基于计算机视觉的自动驾驶应用项目实战.
主要是实际场景的应用–处理一段视频可能存在小bug。来不及测试了—有待修订
下载2–>地址
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











