







 本文探讨了使用MPU6050加速度计计算角度的两种公式,指出它们本质上是等价的。通过tanθ和cosθ的关系,解释了如何从加速度数据中提取角度信息。同时,指出了yaw角直接通过加速度获取的局限性,例如在绕z轴旋转时,yaw角变化但加速度值保持不变。文章引用了相关博客资源作为参考。
本文探讨了使用MPU6050加速度计计算角度的两种公式,指出它们本质上是等价的。通过tanθ和cosθ的关系,解释了如何从加速度数据中提取角度信息。同时,指出了yaw角直接通过加速度获取的局限性,例如在绕z轴旋转时,yaw角变化但加速度值保持不变。文章引用了相关博客资源作为参考。
通过 mpu6050加速度计算角度。网上看有两种公式,分别是下面这两种。
第一种

第二种
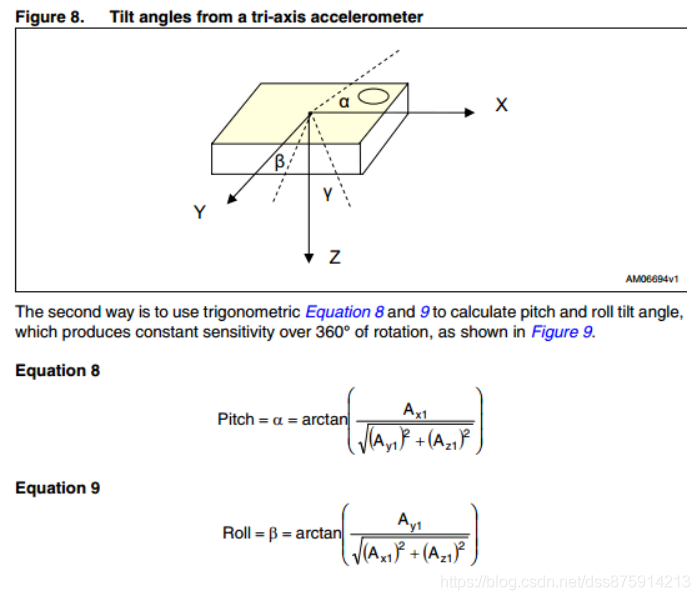
两者看起来是不同的,其实互相不矛盾只是换了一个表达方式。
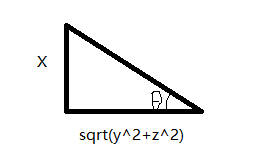
比如上图这个三角形 tanθ=x/sqrt(y^2+z^2)
cosθ=sqrt(y^2+z^2)/sqrt(x^2+y^2+z^2) (其中sqrt(x^2+y^2+z^2)=g)
所以cosθ=sqrt(y^2+z^2)/g
其他想法
yaw 角我感觉不能直接通过加速度获取,比如加速度计水平放置,你把加速度计缓慢绕着z轴旋转,yaw角在不断变化,但是加速度的各个值基本没变,ax=ay=0,az=g。
参考文献
https://blog.csdn.net/lxc1014/article/details/8315629
https://blog.csdn.net/jickjiang/article/details/84237863


















 900
900

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









