







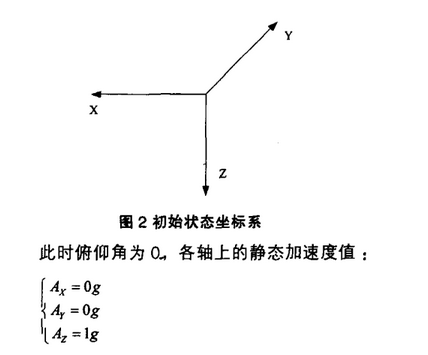
初始状态是,加速度计读数是A_X =0; A_Y=0; A_Z=1g;如下图:
然后旋转一定角度后事这样:
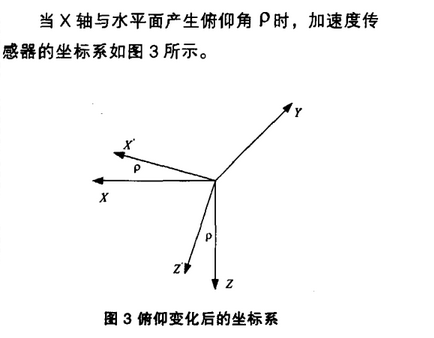
旋转后仍要保证竖直方向是1g的加速度,所以有将X轴和Z轴的加速度值矢量叠加后为1g即可用反正切求出P的大小来了
如图:
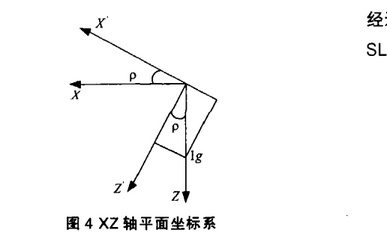
即可得
Angle = atan2(Acc_x,Acc_z);(注意:这里得出来的角度是弧度)
初始状态是,加速度计读数是A_X =0; A_Y=0; A_Z=1g;如下图:
然后旋转一定角度后事这样:
旋转后仍要保证竖直方向是1g的加速度,所以有将X轴和Z轴的加速度值矢量叠加后为1g即可用反正切求出P的大小来了
如图:
即可得
Angle = atan2(Acc_x,Acc_z);(注意:这里得出来的角度是弧度)
 1328
1675
1328
1675











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























