







TCD-LoRA用途广泛,可以与ControlNets、IP adapter和AnimateDiff等其他适配器类型组合使用。
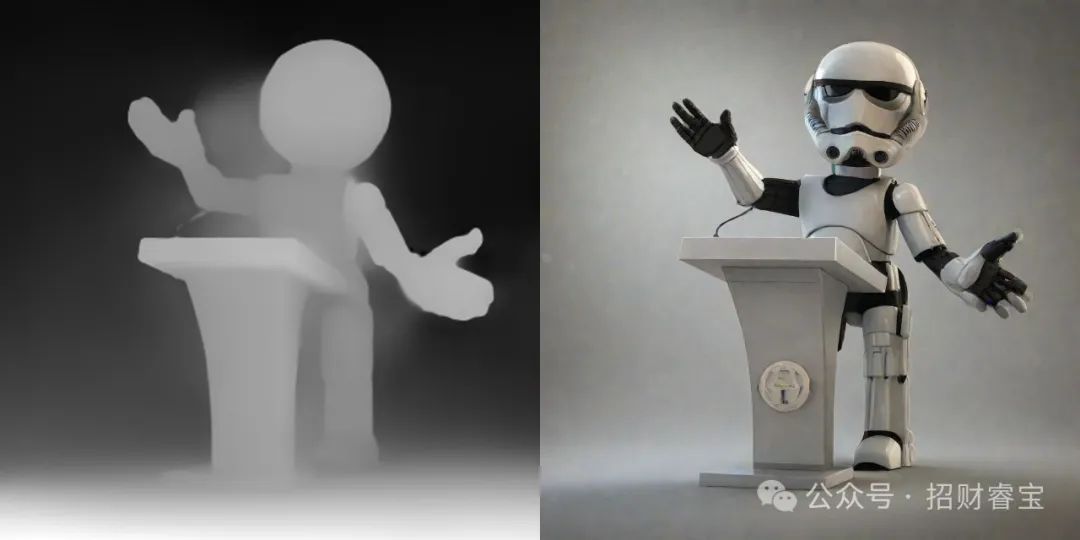
下面是使用Depth ControlNet
import os
os.environ["HF_ENDPOINT"] = "https://hf-mirror.com"
mport torch
import numpy as np
from PIL import Image
from transformers import DPTFeatureExtractor, DPTForDepthEstimation
from diffusers import ControlNetModel, StableDiffusionXLControlNetPipeline
from diffusers.utils import load_image, make_image_grid
from scheduling_tcd import TCDScheduler
device = "cuda"
depth_estimator = DPTForDepthEstimation.from_pretrained("Intel/dpt-hybrid-midas").to(device)
feature_extractor = DPTFeatureExtractor.from_pretrained("Intel/dpt-hybrid-midas")
def get_depth_map(image):
image = feature_extractor(images=image, return_tensors="pt").pixel_values.to(device)
with torch.no_grad(), torch.autocast(device):
depth_map = depth_estimator(image).predicted_depth
depth_map = torch.nn.functional.interpolate(
depth_map.unsqueeze(1),
size=(1024, 1024),
mode="bicubic",
align_corners=False,
)
depth_min = torch.amin(depth_map, dim=[1, 2, 3], keepdim=True)
depth_max = torch.amax(depth_map, dim=[1, 2, 3], keepdim=True)
depth_map = (depth_map - depth_min) / (depth_max - depth_min)
image = torch.cat([depth_map] * 3, dim=1)
image = image.permute(0, 2, 3, 1).cpu().numpy()[0]
image = Image.fromarray((image * 255.0).clip(0, 255).astype(np.uint8))
return image
base_model_id = "stabilityai/stable-diffusion-xl-base-1.0"
controlnet_id = "diffusers/controlnet-depth-sdxl-1.0"
tcd_lora_id = "h1t/TCD-SDXL-LoRA"
controlnet = ControlNetModel.from_pretrained(
controlnet_id,
torch_dtype=torch.float16,
variant="fp16",
).to(device)
pipe = StableDiffusionXLControlNetPipeline.from_pretrained(
base_model_id,
controlnet=controlnet,
torch_dtype=torch.float16,
variant="fp16",
).to(device)
pipe.enable_model_cpu_offload()
pipe.scheduler = TCDScheduler.from_config(pipe.scheduler.config)
pipe.load_lora_weights(tcd_lora_id)
pipe.fuse_lora()
prompt = "stormtrooper lecture, photorealistic"
image = load_image("https://hf-mirror.com/lllyasviel/sd-controlnet-depth/resolve/main/images/stormtrooper.png")
depth_image = get_depth_map(image)
controlnet_conditioning_scale = 0.5 # recommended for good generalization
image = pipe(
prompt,
image=depth_image,
num_inference_steps=4,
guidance_scale=0,
eta=0.3,
controlnet_conditioning_scale=controlnet_conditioning_scale,
generator=torch.Generator(device=device).manual_seed(0),
).images[0]
grid_image = make_image_grid([depth_image, image], rows=1, cols=2)
grid_image.save("infer.jpg")
















 9592
9592

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











