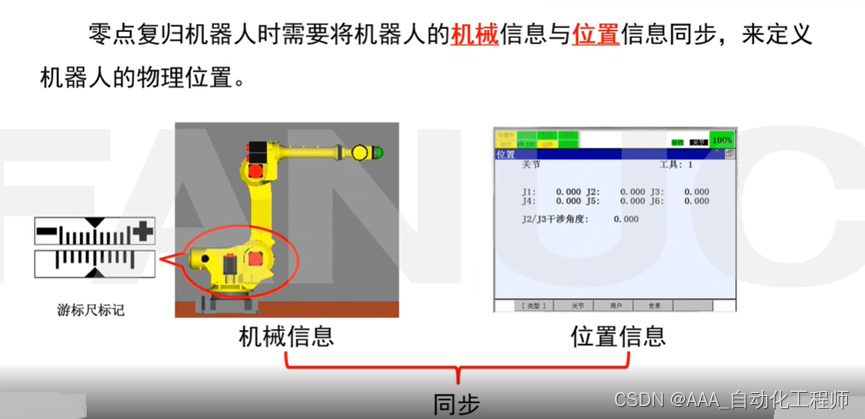
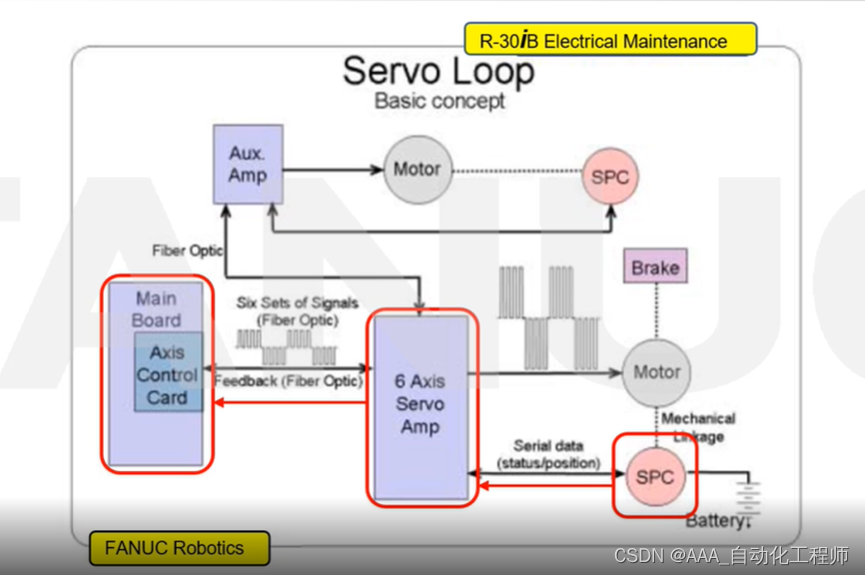
FANUC机器人零点复归的报警原因分析和零点标定相关步骤 FANUC机器人零点复归时需要将机器人的机械信息与位置信息同步,来定义机器人的物理位置。 机器人通过闭环伺服系统来控制机器人各运动轴,当用户通过示教器点动机器人时,经过主板分析此命令后,带动电机旋转,电机上的SPC串行脉冲编码器将脉冲存储到6轴放大器并反馈到主板,主板上经过处理,再将脉冲转化为角度数据,最终反馈到示教器上。


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 超级会员免费看
超级会员免费看
 本文详细分析了FANUC机器人零点复归时可能出现的报警原因,如主板参数丢失、脉冲计数不匹配等,并提供了消除SRVO-062和SRVO-075报警的步骤。通过零点标定/校准菜单,进行脉冲编码器报警复位和轴报警解除。介绍了全轴、单轴和简易零点标定方法,帮助理解FANUC机器人零点标定的目的和步骤。
本文详细分析了FANUC机器人零点复归时可能出现的报警原因,如主板参数丢失、脉冲计数不匹配等,并提供了消除SRVO-062和SRVO-075报警的步骤。通过零点标定/校准菜单,进行脉冲编码器报警复位和轴报警解除。介绍了全轴、单轴和简易零点标定方法,帮助理解FANUC机器人零点标定的目的和步骤。



 订阅专栏 解锁全文
订阅专栏 解锁全文



















 1380
1380







