



现象如图: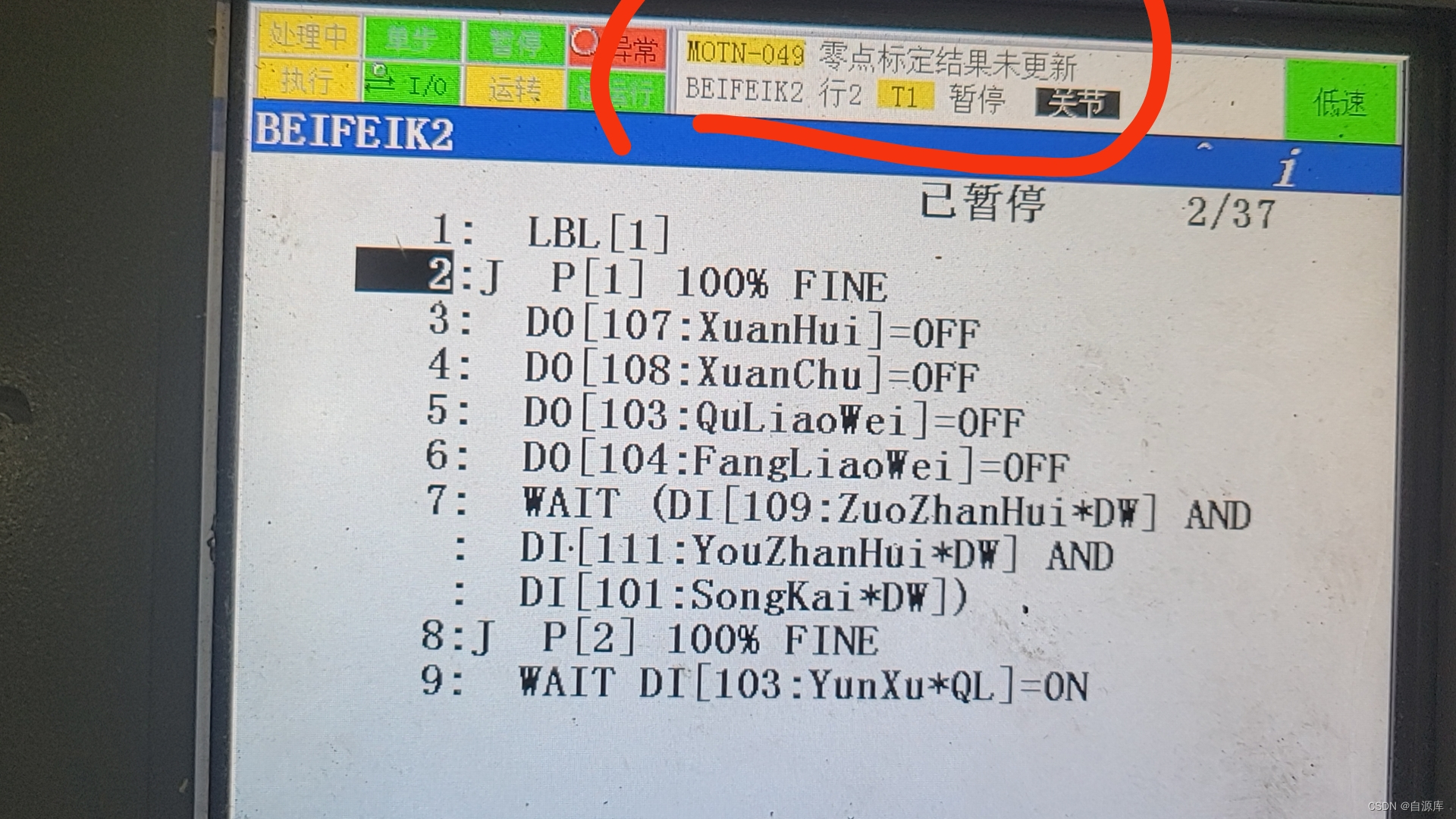 原因:机器人在进行零位标定相关操作后出现
原因:机器人在进行零位标定相关操作后出现
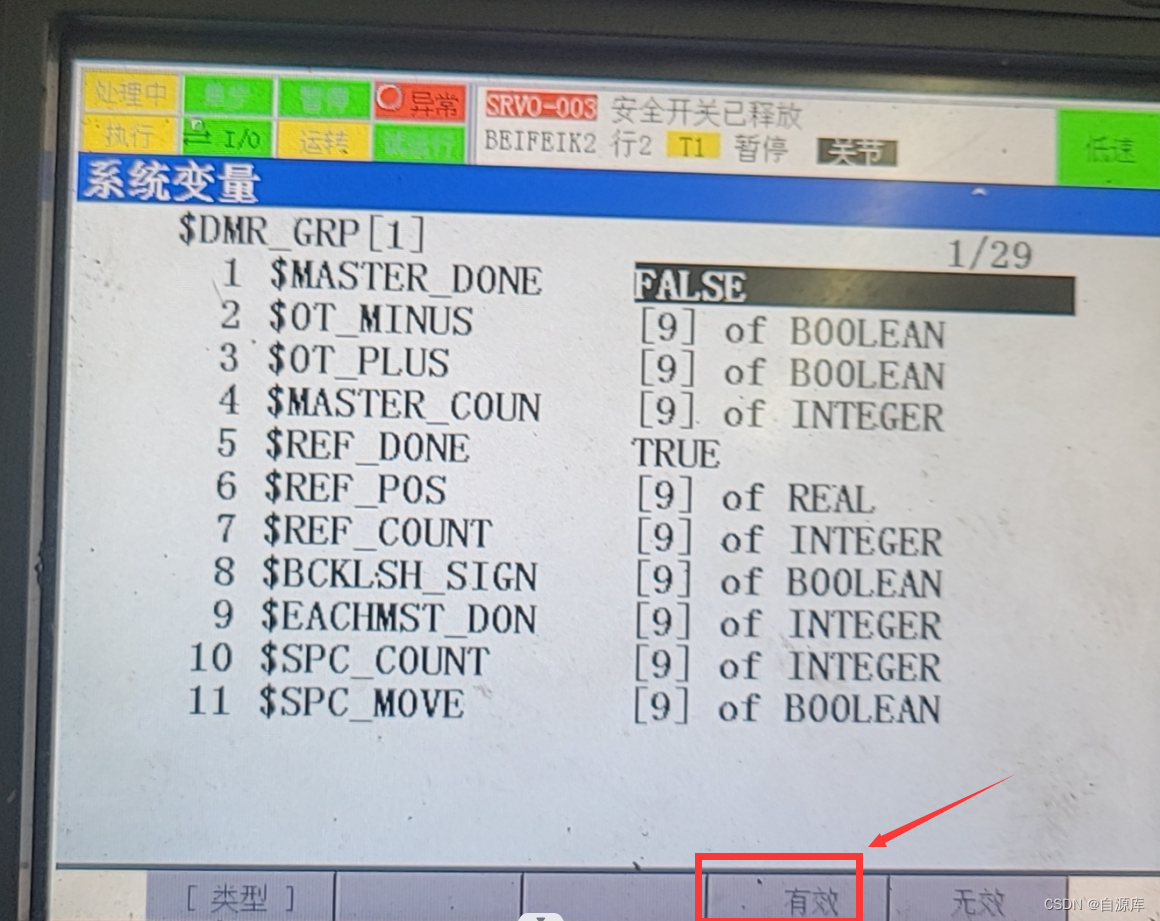
解决方法:MENU---系统---变量---$DMR_GRP--回车---回车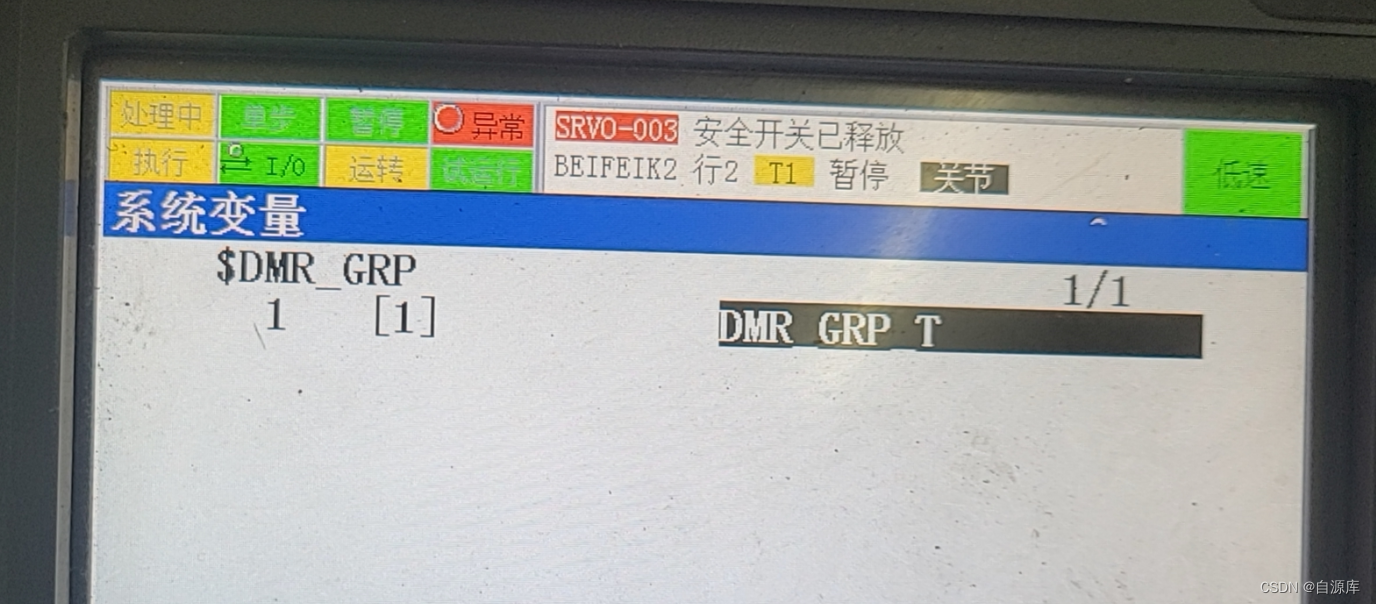
 选择有效后查看一下机器人点位
选择有效后查看一下机器人点位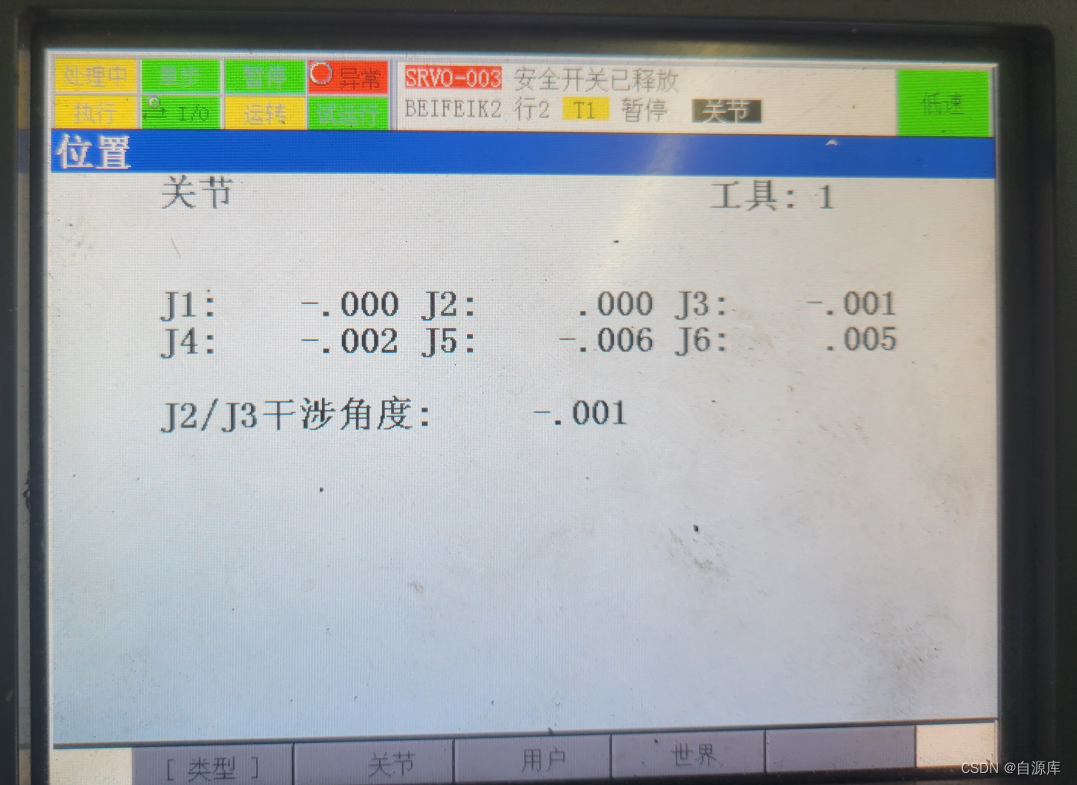 然后重启机器人,开机后查看机器人点位和关机前对比,点位一致则表示成功,上使能机器人就可以手动运动。
然后重启机器人,开机后查看机器人点位和关机前对比,点位一致则表示成功,上使能机器人就可以手动运动。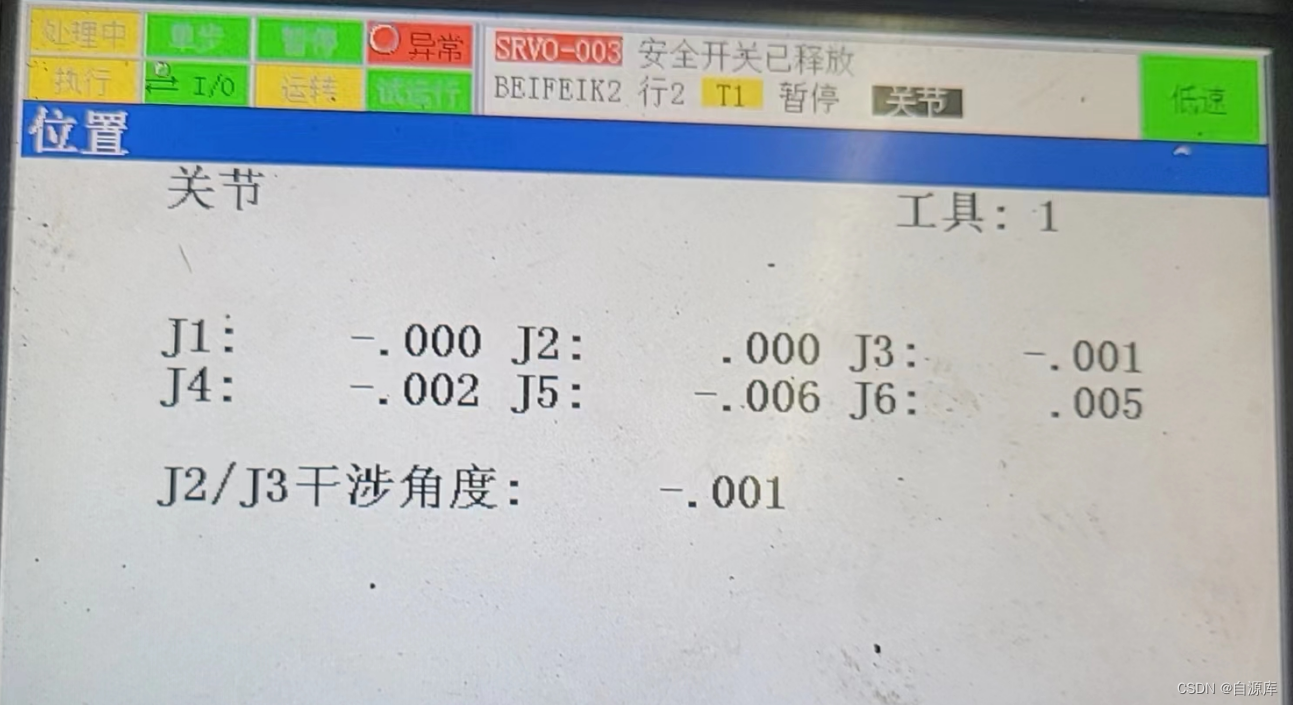
 文章讲述了机器人在零位标定后可能出现的问题,提供了通过系统变量检查和设置($DMR_GRP)的操作步骤,以及重启机器人后对比点位以确认标定成功的技巧。
文章讲述了机器人在零位标定后可能出现的问题,提供了通过系统变量检查和设置($DMR_GRP)的操作步骤,以及重启机器人后对比点位以确认标定成功的技巧。
现象如图:原因:机器人在进行零位标定相关操作后出现
解决方法:MENU---系统---变量---$DMR_GRP--回车---回车选择有效后查看一下机器人点位然后重启机器人,开机后查看机器人点位和关机前对比,点位一致则表示成功,上使能机器人就可以手动运动。
 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























