






 超级会员免费看
超级会员免费看
 本文详细介绍了如何在Robotstudio2024中从备份文件恢复和创建工作站。首先,通过新建工作站并选择所需机器人型号,然后在虚拟控制器中选择从备份创建,导入备份文件。确保安装了对应版本的RobotWare和所需插件。完成恢复后,启动控制器,启动虚拟示教器,进入手动模式,并执行运动指令进行测试。
本文详细介绍了如何在Robotstudio2024中从备份文件恢复和创建工作站。首先,通过新建工作站并选择所需机器人型号,然后在虚拟控制器中选择从备份创建,导入备份文件。确保安装了对应版本的RobotWare和所需插件。完成恢复后,启动控制器,启动虚拟示教器,进入手动模式,并执行运动指令进行测试。
Robotstudio2024中从备份文件恢复和创建工作站的具体方法演示

如下图所示,打开Robotstudio2024软件,有需要的可以从以下链接获取:
ABB机器人编程仿真软件RobotStudio 2024.1-链接baiduyun
点击“新建”—工作站—创建,

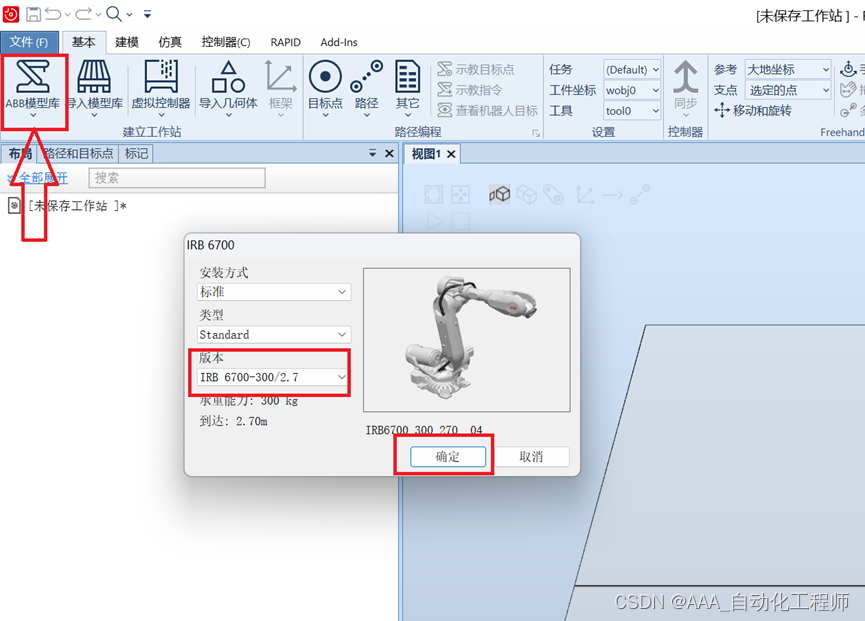
如下图所示,点击“ABB模型库”,选择自己使用的机器人型号,我这里以IRB6700-300/2.7为例进行说明,
如下图所示,点击虚拟控制器—新控制器,

如下图所示,打开Robotstudio2024软件,有需要的可以从以下链接获取:
ABB机器人编程仿真软件RobotStudio 2024.1-链接baiduyun
点击“新建”—工作站—创建,
如下图所示,点击“ABB模型库”,选择自己使用的机器人型号,我这里以IRB6700-300/2.7为例进行说明,
如下图所示,点击虚拟控制器—新控制器,
 3953
3953

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


























