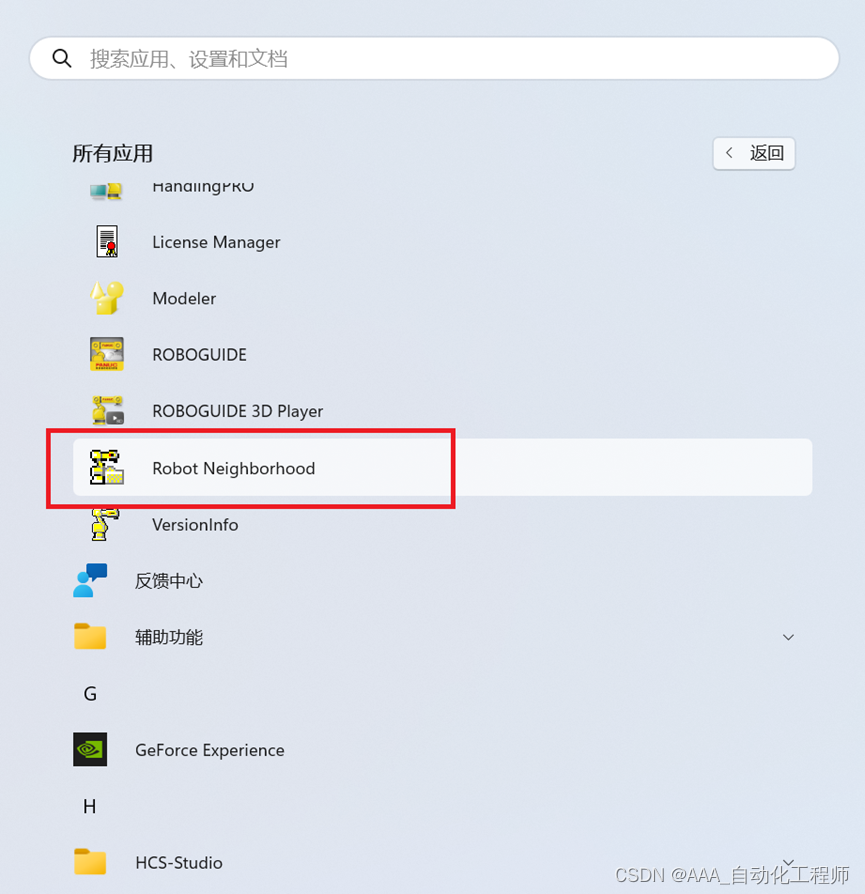
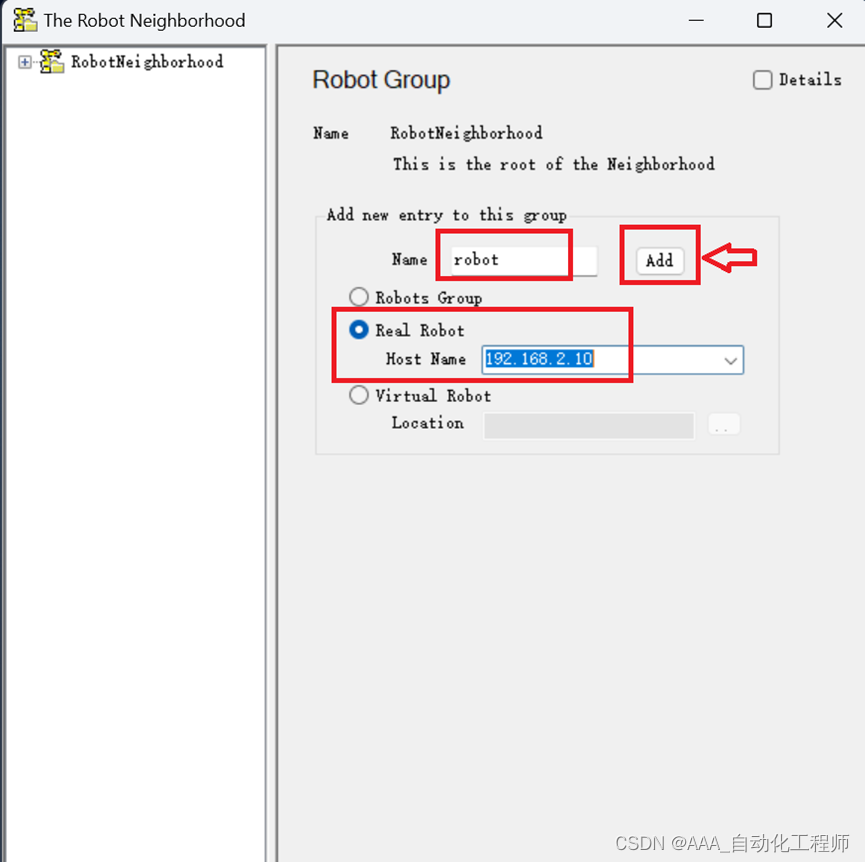
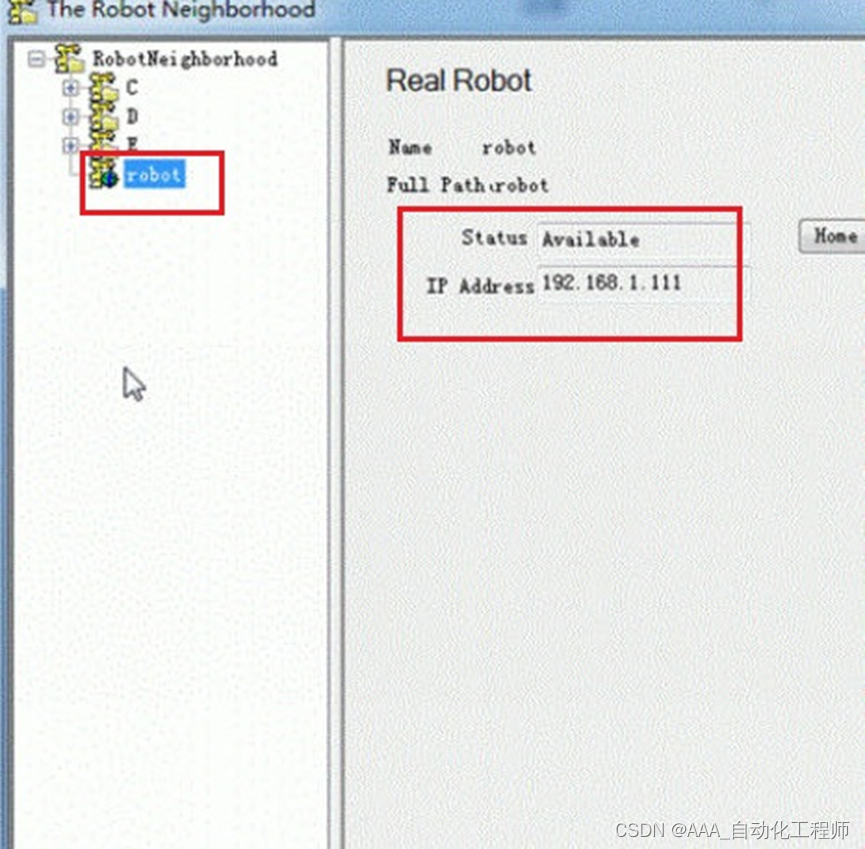
FANUC机器人通过ROBOGUIDE实现与实际的机器人进行程序导入导出的具体方法示例 如下图所示,在电脑的开始菜单中找到”Robot Neiborhood”,点击进入, 如下图所示,设置要连接的机器人名称和主机IP地址(要确保自己的电脑和机器人IP地址在同一网段内),点击Add添加, 添加在线机器人成功后,Status一栏会显示“Available”,说明添加成功; 若显示Unavailable,则说明添加失败; 如下图所示,打开ROBOGUIDE软件,点击新建工作单元,设置工作单元名称,点击下一步,


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 超级会员免费看
超级会员免费看
 本文详细介绍了如何通过FANUC的ROBOGUIDE软件与实际机器人进行程序的导入导出。首先,从电脑的开始菜单启动”Robot Neiborhood“,设置连接的机器人名称和IP地址。确保两者在同一网络内,成功添加后状态显示为“Available”。接着,在ROBOGUIDE中新建工作单元,选择已添加的机器人副本,系统将自动上传实际机器人的信息,从而实现程序的交互操作。
本文详细介绍了如何通过FANUC的ROBOGUIDE软件与实际机器人进行程序的导入导出。首先,从电脑的开始菜单启动”Robot Neiborhood“,设置连接的机器人名称和IP地址。确保两者在同一网络内,成功添加后状态显示为“Available”。接着,在ROBOGUIDE中新建工作单元,选择已添加的机器人副本,系统将自动上传实际机器人的信息,从而实现程序的交互操作。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 1万+
1万+







